 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fleet Learning Architecture for Enhanced Behavior Predictions during Challenging External Conditions
Paper and Code
Sep 24, 2020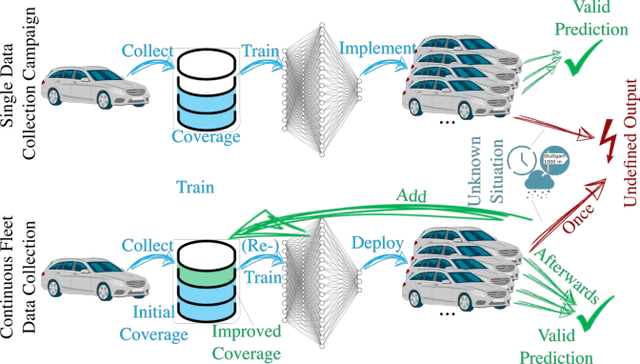

Already today, driver assistance systems help to make daily traffic more comfortable and safer. However, there are still situations that are quite rare but are hard to handle at the same time. In order to cope with these situations and to bridge the gap towards fully automated driving, it becomes necessary to not only collect enormous amounts of data but rather the right ones. This data can be used to develop and validate the systems through machine learning and simulation pipelines. Along this line this paper presents a fleet learning-based architecture that enables continuous improvements of systems predicting the movement of surrounding traffic participants. Moreover, the presented architecture is applied to a testing vehicle in order to prove the fundamental feasibility of the system. Finally, it is shown that the system collects meaningful data which are helpful to improve the underlying prediction systems.