 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoltage-Controlled Magnetoelectric Devices for Neuromorphic Diffusion Process
Jul 17, 2024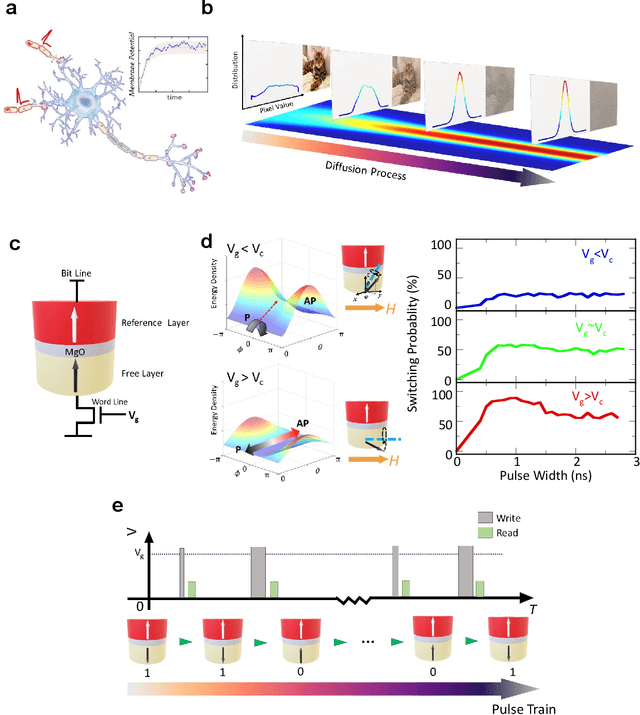
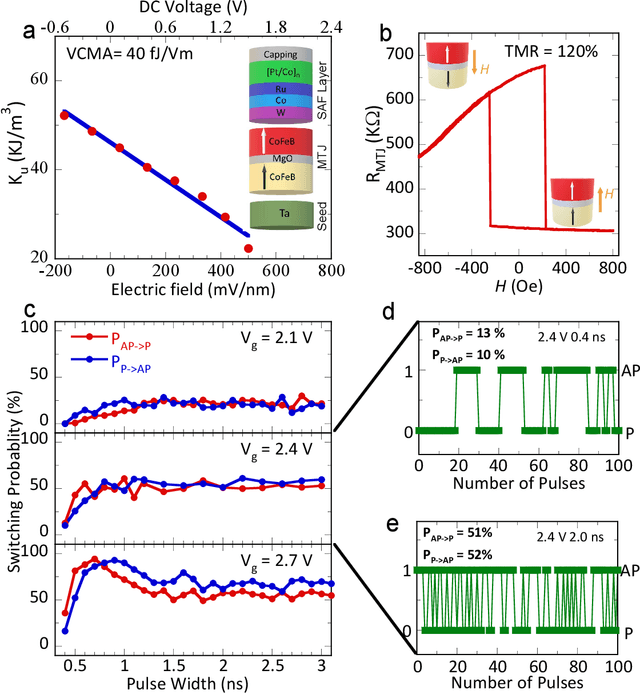
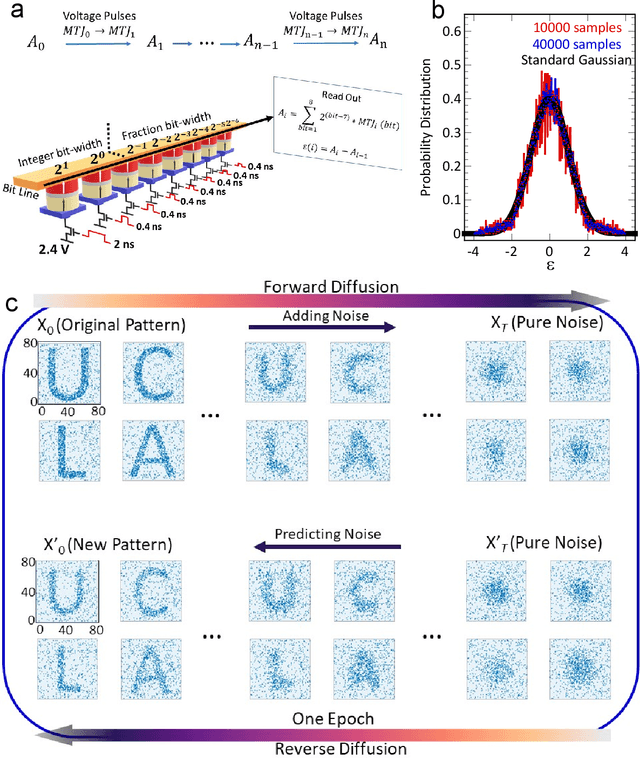
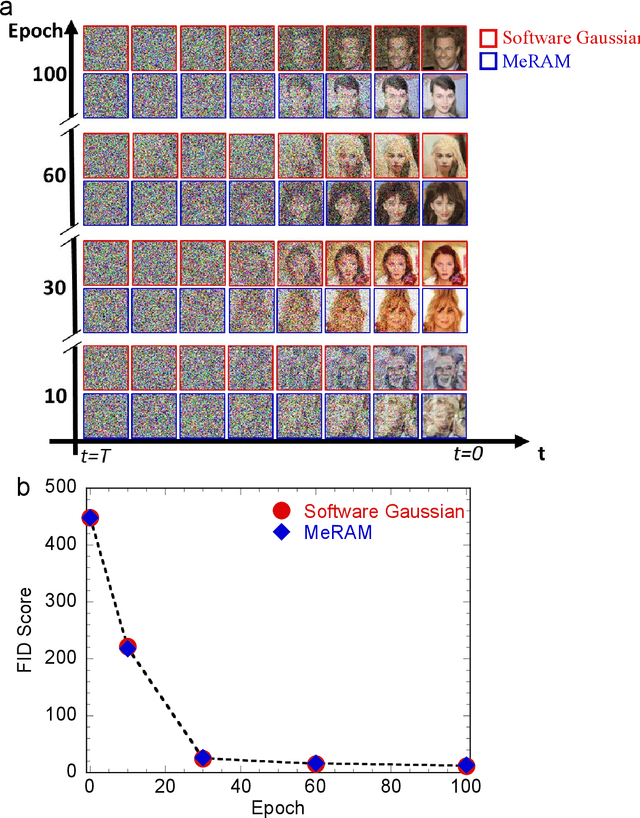
Stochastic diffusion processes are pervasive in nature, from the seemingly erratic Brownian motion to the complex interactions of synaptically-coupled spiking neurons. Recently, drawing inspiration from Langevin dynamics, neuromorphic diffusion models were proposed and have become one of the major breakthroughs in the field of generative artificial intelligence. Unlike discriminative models that have been well developed to tackle classification or regression tasks, diffusion models as well as other generative models such as ChatGPT aim at creating content based upon contexts learned. However, the more complex algorithms of these models result in high computational costs using today's technologies, creating a bottleneck in their efficiency, and impeding further development. Here, we develop a spintronic voltage-controlled magnetoelectric memory hardware for the neuromorphic diffusion process. The in-memory computing capability of our spintronic devices goes beyond current Von Neumann architecture, where memory and computing units are separated. Together with the non-volatility of magnetic memory, we can achieve high-speed and low-cost computing, which is desirable for the increasing scale of generative models in the current era. We experimentally demonstrate that the hardware-based true random diffusion process can be implemented for image generation and achieve comparable image quality to software-based training as measured by the Frechet inception distance (FID) score, achieving ~10^3 better energy-per-bit-per-area over traditional hardware.
Analyzing the Variations in Emergency Department Boarding and Testing the Transferability of Forecasting Models across COVID-19 Pandemic Waves in Hong Kong: Hybrid CNN-LSTM approach to quantifying building-level socioecological risk
Mar 17, 2024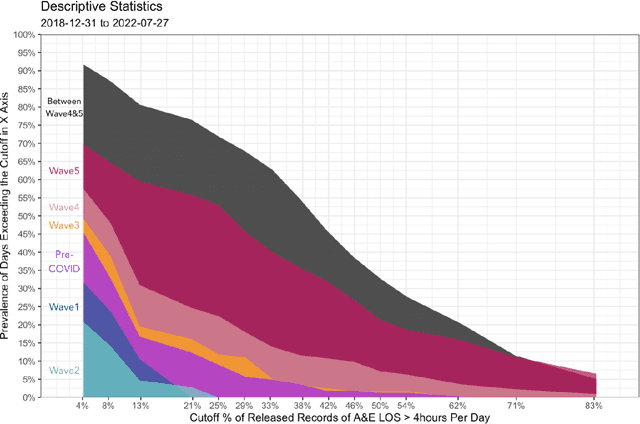
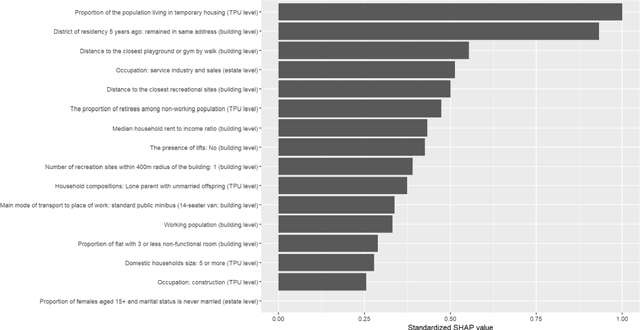
Emergency department's (ED) boarding (defined as ED waiting time greater than four hours) has been linked to poor patient outcomes and health system performance. Yet, effective forecasting models is rare before COVID-19, lacking during the peri-COVID era. Here, a hybrid convolutional neural network (CNN)-Long short-term memory (LSTM) model was applied to public-domain data sourced from Hong Kong's Hospital Authority, Department of Health, and Housing Authority. In addition, we sought to identify the phase of the COVID-19 pandemic that most significantly perturbed our complex adaptive healthcare system, thereby revealing a stable pattern of interconnectedness among its components, using deep transfer learning methodology. Our result shows that 1) the greatest proportion of days with ED boarding was found between waves four and five; 2) the best-performing model for forecasting ED boarding was observed between waves four and five, which was based on features representing time-invariant residential buildings' built environment and sociodemographic profiles and the historical time series of ED boarding and case counts, compared to during the waves when best-performing forecasting is based on time-series features alone; and 3) when the model built from the period between waves four and five was applied to data from other waves via deep transfer learning, the transferred model enhanced the performance of indigenous models.
A Read Margin Enhancement Circuit with Dynamic Bias Optimization for MRAM
Sep 18, 2023



This brief introduces a read bias circuit to improve readout yield of magnetic random access memories (MRAMs). A dynamic bias optimization (DBO) circuit is proposed to enable the real-time tracking of the optimal read voltage across processvoltage-temperature (PVT) variations within an MRAM array. It optimizes read performance by adjusting the read bias voltage dynamically for maximum sensing margin. Simulation results on a 28-nm 1Mb MRAM macro show that the tracking accuracy of the proposed DBO circuit remains above 90% even when the optimal sensing voltage varies up to 50%. Such dynamic tracking strategy further results in up to two orders of magnitude reduction in the bit error rate with respect to different variations, highlighting its effectiveness in enhancing MRAM performance and reliability.
Max and Coincidence Neurons in Neural Networks
Oct 04, 2021
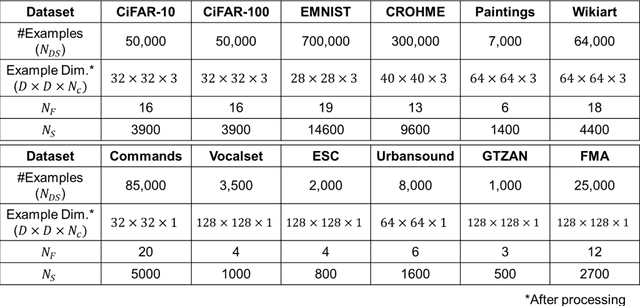
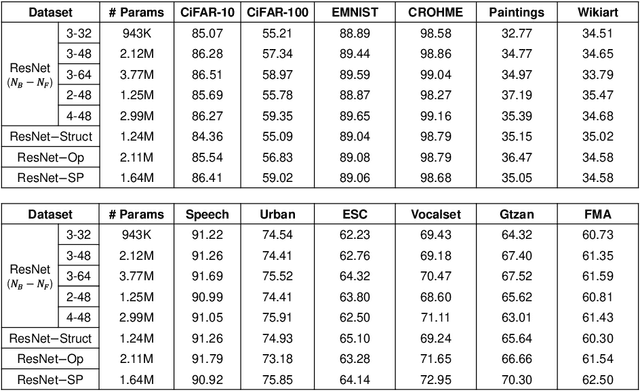
Network design has been a central topic in machine learning. Large amounts of effort have been devoted towards creating efficient architectures through manual exploration as well as automated neural architecture search. However, todays architectures have yet to consider the diversity of neurons and the existence of neurons with specific processing functions. In this work, we optimize networks containing models of the max and coincidence neurons using neural architecture search, and analyze the structure, operations, and neurons of optimized networks to develop a signal-processing ResNet. The developed network achieves an average of 2% improvement in accuracy and a 25% improvement in network size across a variety of datasets, demonstrating the importance of neuronal functions in creating compact, efficient networks.
Force-Sensing Tensegrity for Investigating Physical Human-Robot Interaction in Compliant Robotic Systems
Jun 15, 2021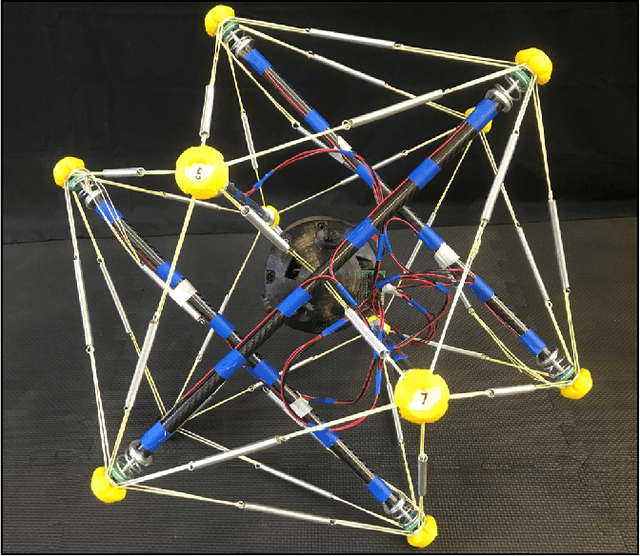
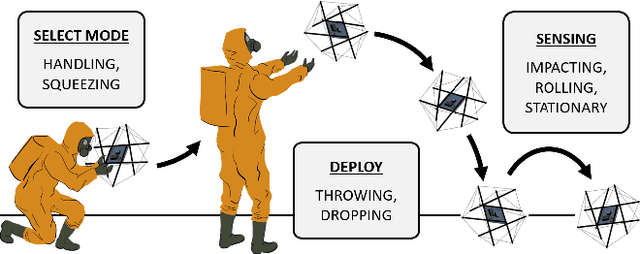
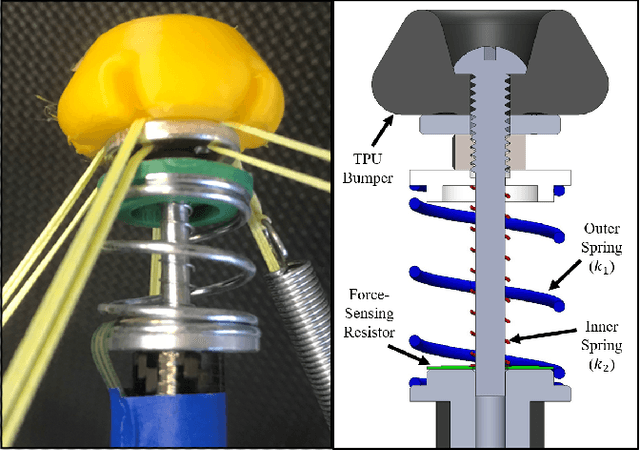
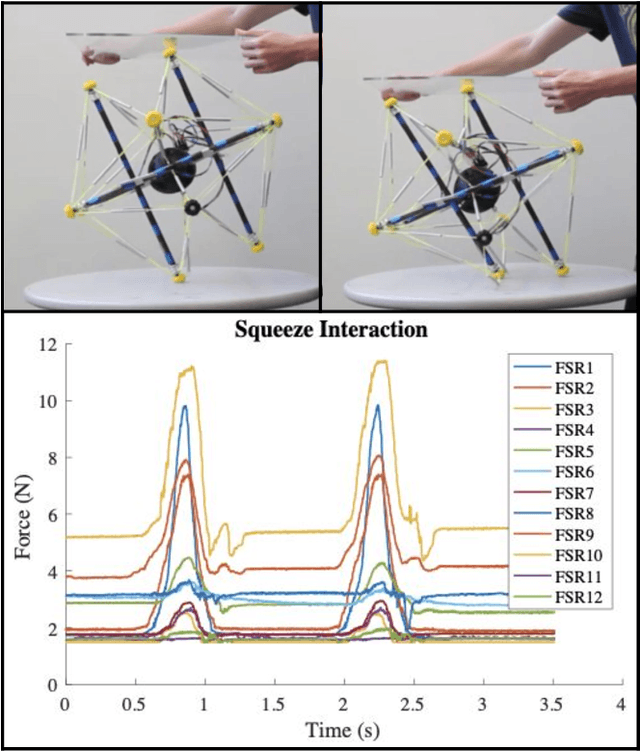
Advancements in the domain of physical human-robot interaction (pHRI) have tremendously improved the ability of humans and robots to communicate, collaborate, and coexist. In particular, compliant robotic systems offer many characteristics that can be leveraged towards enabling physical interactions that more efficiently and intuitively communicate intent, making compliant systems potentially useful in more physically demanding subsets of human-robot collaborative scenarios. Tensegrity robots are an example of compliant systems that are well-suited to physical interactions while still retaining useful rigid properties that make them practical for a variety of applications. In this paper, we present the design and preliminary testing of a 6-bar spherical tensegrity with force-sensing capabilities. Using this prototype, we demonstrate the ability of its force-sensor array to detect a variety of physical interaction types that might arise in a human context. We then train and test a series of classifiers using data from unique and representative interactions in order to demonstrate the feasibility of using this physical modality of sensing to reliably communicate goals and intents from a human operator in a human-robot collaborative setting.
Conditional Activation for Diverse Neurons in Heterogeneous Networks
Mar 13, 2018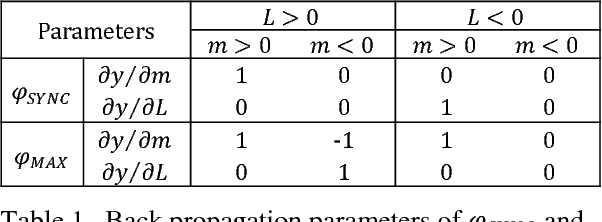
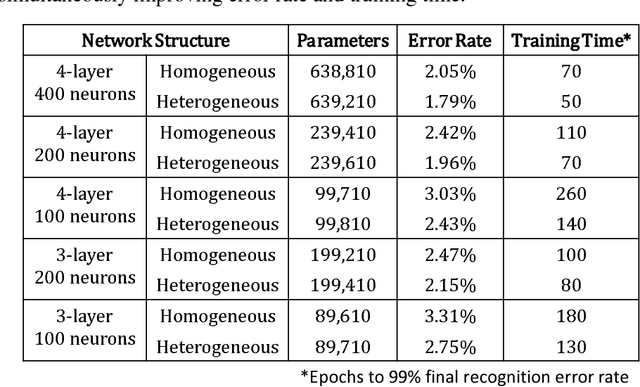
In this paper, we propose a new scheme for modelling the diverse behavior of neurons. We introduce the conditional activation, in which a neurons activation function is dynamically modified by a control signal. We apply this method to recreate behavior of special neurons existing in the human auditory and visual system. A heterogeneous multilayered perceptron (MLP) incorporating the developed models demonstrates simultaneous improvement in learning speed and performance across a various number of hidden units and layers, compared to a homogeneous network composed of the conventional neuron model. For similar performance, the proposed model lowers the memory for storing network parameters significantly.