 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-Sensing Tensegrity for Investigating Physical Human-Robot Interaction in Compliant Robotic Systems
Jun 15, 2021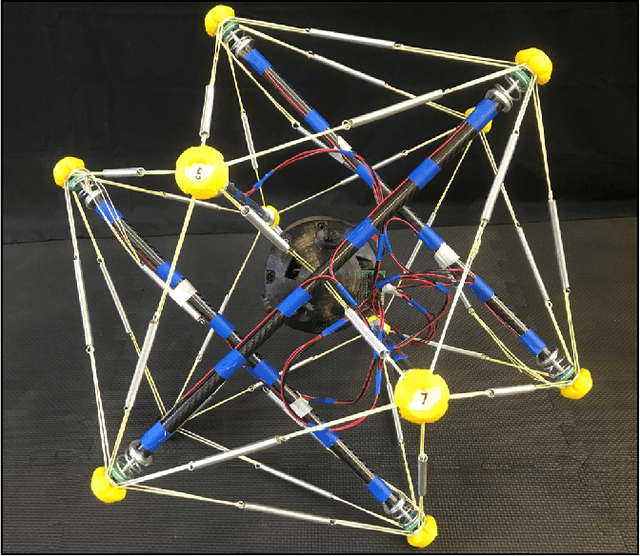
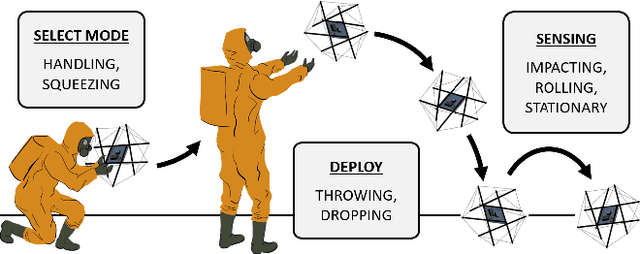
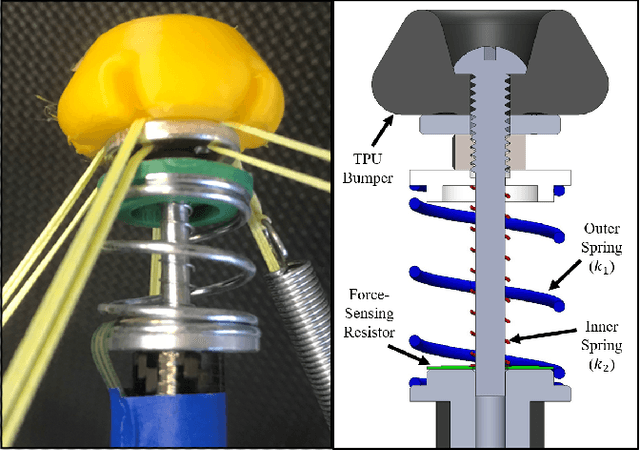
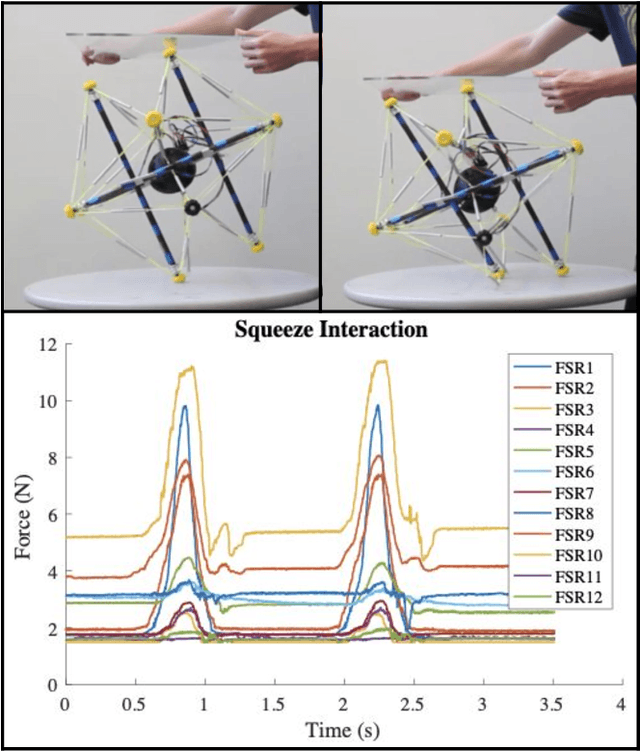
Advancements in the domain of physical human-robot interaction (pHRI) have tremendously improved the ability of humans and robots to communicate, collaborate, and coexist. In particular, compliant robotic systems offer many characteristics that can be leveraged towards enabling physical interactions that more efficiently and intuitively communicate intent, making compliant systems potentially useful in more physically demanding subsets of human-robot collaborative scenarios. Tensegrity robots are an example of compliant systems that are well-suited to physical interactions while still retaining useful rigid properties that make them practical for a variety of applications. In this paper, we present the design and preliminary testing of a 6-bar spherical tensegrity with force-sensing capabilities. Using this prototype, we demonstrate the ability of its force-sensor array to detect a variety of physical interaction types that might arise in a human context. We then train and test a series of classifiers using data from unique and representative interactions in order to demonstrate the feasibility of using this physical modality of sensing to reliably communicate goals and intents from a human operator in a human-robot collaborative setting.