 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvergence of Communications, Control, and Machine Learning for Secure and Autonomous Vehicle Navigation
Jul 05, 2023Connected and autonomous vehicles (CAVs) can reduce human errors in traffic accidents, increase road efficiency, and execute various tasks ranging from delivery to smart city surveillance. Reaping these benefits requires CAVs to autonomously navigate to target destinations. To this end, each CAV's navigation controller must leverage the information collected by sensors and wireless systems for decision-making on longitudinal and lateral movements. However, enabling autonomous navigation for CAVs requires a convergent integration of communication, control, and learning systems. The goal of this article is to explicitly expose the challenges related to this convergence and propose solutions to address them in two major use cases: Uncoordinated and coordinated CAVs. In particular, challenges related to the navigation of uncoordinated CAVs include stable path tracking, robust control against cyber-physical attacks, and adaptive navigation controller design. Meanwhile, when multiple CAVs coordinate their movements during navigation, fundamental problems such as stable formation, fast collaborative learning, and distributed intrusion detection are analyzed. For both cases, solutions using the convergence of communication theory, control theory, and machine learning are proposed to enable effective and secure CAV navigation. Preliminary simulation results are provided to show the merits of proposed solutions.
Two-Bit Aggregation for Communication Efficient and Differentially Private Federated Learning
Oct 06, 2021

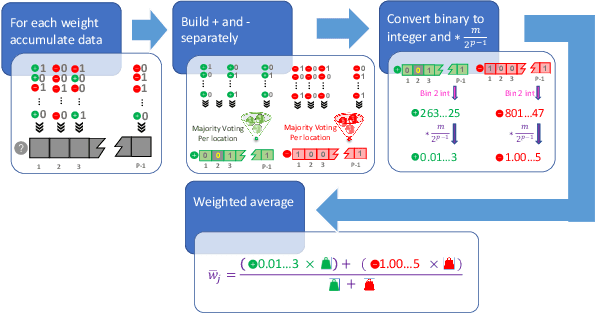
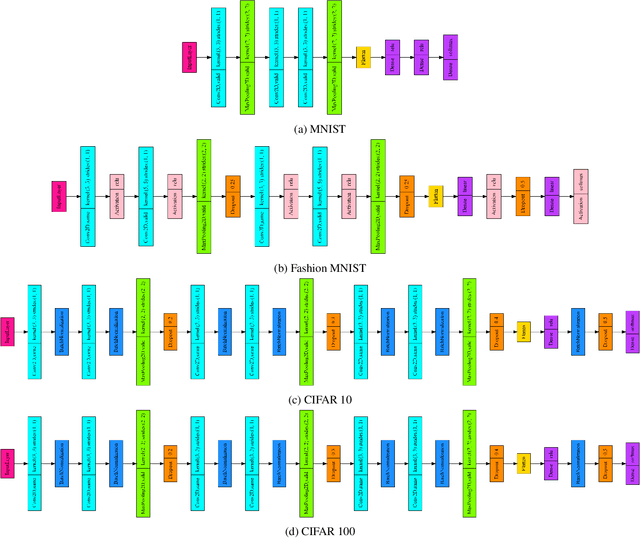
In federated learning (FL), a machine learning model is trained on multiple nodes in a decentralized manner, while keeping the data local and not shared with other nodes. However, FL requires the nodes to also send information on the model parameters to a central server for aggregation. However, the information sent from the nodes to the server may reveal some details about each node's local data, thus raising privacy concerns. Furthermore, the repetitive uplink transmission from the nodes to the server may result in a communication overhead and network congestion. To address these two challenges, in this paper, a novel two-bit aggregation algorithm is proposed with guaranteed differential privacy and reduced uplink communication overhead. Extensive experiments demonstrate that the proposed aggregation algorithm can achieve the same performance as state-of-the-art approaches on datasets such as MNIST, Fashion MNIST, CIFAR-10, and CIFAR-100, while ensuring differential privacy and improving communication efficiency.
Deep Learning for Rain Fade Prediction in Satellite Communications
Oct 02, 2021


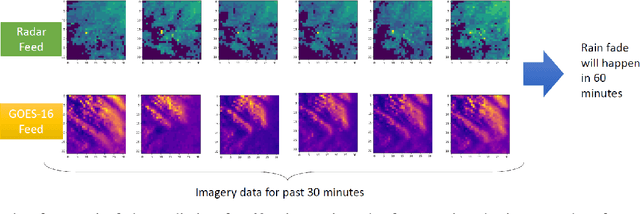
Line of sight satellite systems, unmanned aerial vehicles, high-altitude platforms, and microwave links that operate on frequency bands such as Ka-band or higher are extremely susceptible to rain. Thus, rain fade forecasting for these systems is critical because it allows the system to switch between ground gateways proactively before a rain fade event to maintain seamless service. Although empirical, statistical, and fade slope models can predict rain fade to some extent, they typically require statistical measurements of rain characteristics in a given area and cannot be generalized to a large scale system. Furthermore, such models typically predict near-future rain fade events but are incapable of forecasting far into the future, making proactive resource management more difficult. In this paper, a deep learning (DL)-based architecture is proposed that forecasts future rain fade using satellite and radar imagery data as well as link power measurements. Furthermore, the data preprocessing and architectural design have been thoroughly explained and multiple experiments have been conducted. Experiments show that the proposed DL architecture outperforms current state-of-the-art machine learning-based algorithms in rain fade forecasting in the near and long term. Moreover, the results indicate that radar data with weather condition information is more effective for short-term prediction, while satellite data with cloud movement information is more effective for long-term predictions.
AoI-minimizing Scheduling in UAV-relayed IoT Networks
Jul 30, 2021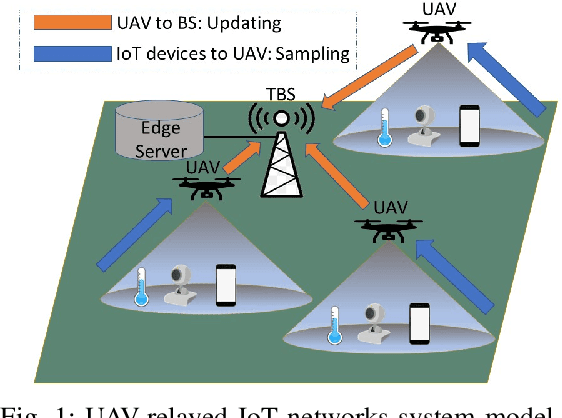
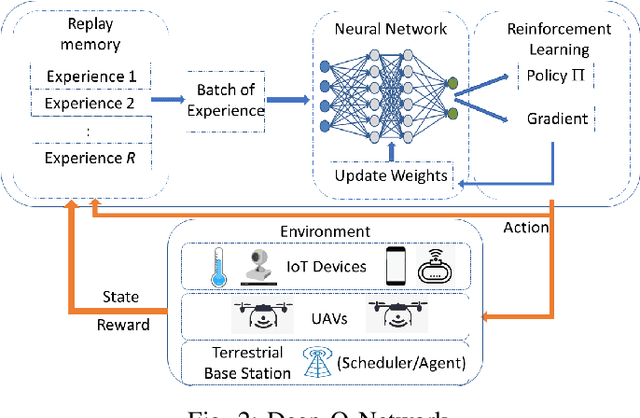
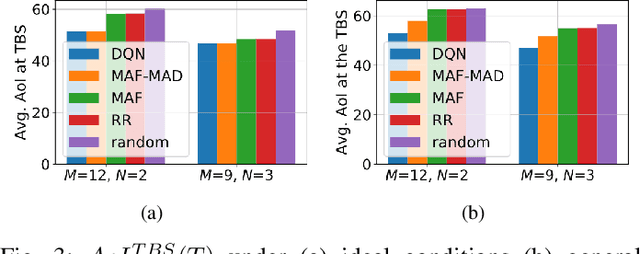
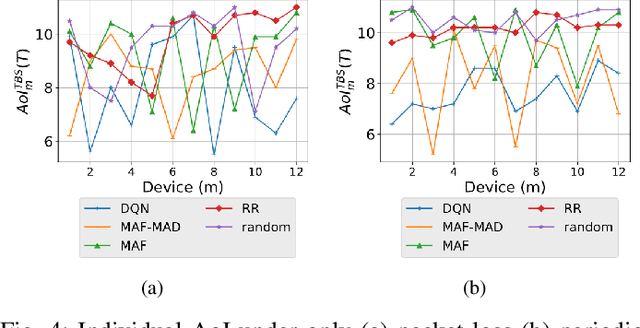
Due to flexibility, autonomy and low operational cost, unmanned aerial vehicles (UAVs), as fixed aerial base stations, are increasingly being used as \textit{relays} to collect time-sensitive information (i.e., status updates) from IoT devices and deliver it to the nearby terrestrial base station (TBS), where the information gets processed. In order to ensure timely delivery of information to the TBS (from all IoT devices), optimal scheduling of time-sensitive information over two hop UAV-relayed IoT networks (i.e., IoT device to the UAV [hop 1], and UAV to the TBS [hop 2]) becomes a critical challenge. To address this, we propose scheduling policies for Age of Information (AoI) minimization in such two-hop UAV-relayed IoT networks. To this end, we present a low-complexity MAF-MAD scheduler, that employs Maximum AoI First (MAF) policy for sampling of IoT devices at UAV (hop 1) and Maximum AoI Difference (MAD) policy for updating sampled packets from UAV to the TBS (hop 2). We show that MAF-MAD is the optimal scheduler under ideal conditions, i.e., error-free channels and generate-at-will traffic generation at IoT devices. On the contrary, for realistic conditions, we propose a Deep-Q-Networks (DQN) based scheduler. Our simulation results show that DQN-based scheduler outperforms MAF-MAD scheduler and three other baseline schedulers, i.e., Maximal AoI First (MAF), Round Robin (RR) and Random, employed at both hops under general conditions when the network is small (with 10's of IoT devices). However, it does not scale well with network size whereas MAF-MAD outperforms all other schedulers under all considered scenarios for larger networks.
Reinforcement Learning for Deceiving Reactive Jammers in Wireless Networks
Mar 25, 2021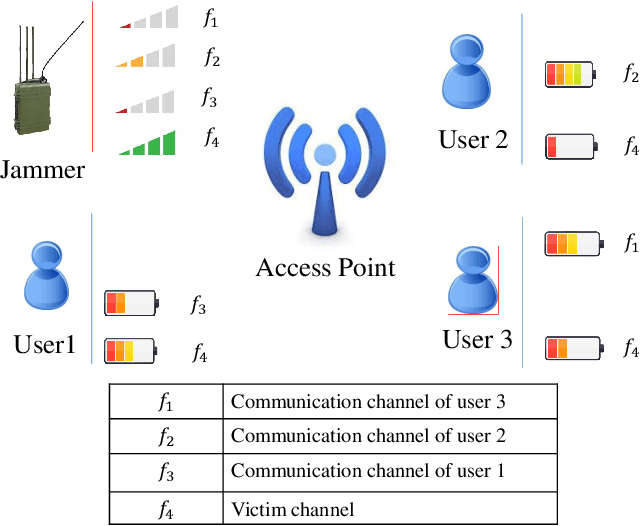
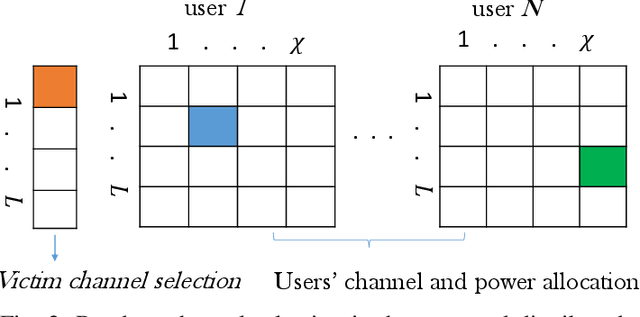
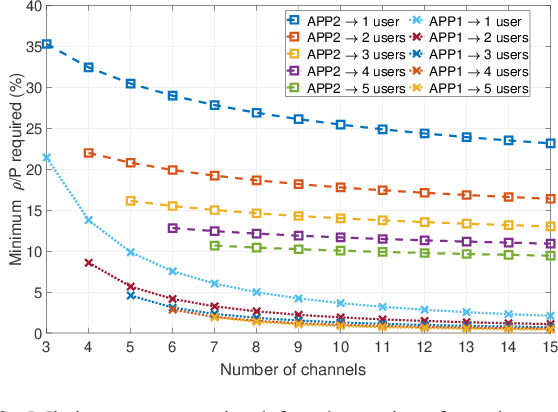
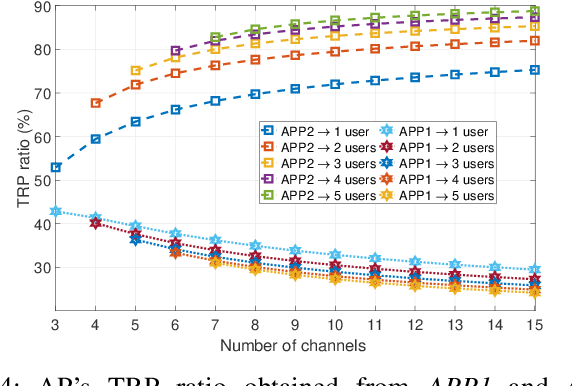
Conventional anti-jamming method mostly rely on frequency hopping to hide or escape from jammer. These approaches are not efficient in terms of bandwidth usage and can also result in a high probability of jamming. Different from existing works, in this paper, a novel anti-jamming strategy is proposed based on the idea of deceiving the jammer into attacking a victim channel while maintaining the communications of legitimate users in safe channels. Since the jammer's channel information is not known to the users, an optimal channel selection scheme and a sub optimal power allocation are proposed using reinforcement learning (RL). The performance of the proposed anti-jamming technique is evaluated by deriving the statistical lower bound of the total received power (TRP). Analytical results show that, for a given access point, over 50 % of the highest achievable TRP, i.e. in the absence of jammers, is achieved for the case of a single user and three frequency channels. Moreover, this value increases with the number of users and available channels. The obtained results are compared with two existing RL based anti-jamming techniques, and random channel allocation strategy without any jamming attacks. Simulation results show that the proposed anti-jamming method outperforms the compared RL based anti-jamming methods and random search method, and yields near optimal achievable TRP.
Distributed Conditional Generative Adversarial Networks (GANs) for Data-Driven Millimeter Wave Communications in UAV Networks
Feb 02, 2021

In this paper, a novel framework is proposed to perform data-driven air-to-ground (A2G) channel estimation for millimeter wave (mmWave) communications in an unmanned aerial vehicle (UAV) wireless network. First, an effective channel estimation approach is developed to collect mmWave channel information, allowing each UAV to train a stand-alone channel model via a conditional generative adversarial network (CGAN) along each beamforming direction. Next, in order to expand the application scenarios of the trained channel model into a broader spatial-temporal domain, a cooperative framework, based on a distributed CGAN architecture, is developed, allowing each UAV to collaboratively learn the mmWave channel distribution in a fully-distributed manner. To guarantee an efficient learning process, necessary and sufficient conditions for the optimal UAV network topology that maximizes the learning rate for cooperative channel modeling are derived, and the optimal CGAN learning solution per UAV is subsequently characterized, based on the distributed network structure. Simulation results show that the proposed distributed CGAN approach is robust to the local training error at each UAV. Meanwhile, a larger airborne network size requires more communication resources per UAV to guarantee an efficient learning rate. The results also show that, compared with a stand-alone CGAN without information sharing and two other distributed schemes, namely: A multi-discriminator CGAN and a federated CGAN method, the proposed distributed CGAN approach yields a higher modeling accuracy while learning the environment, and it achieves a larger average data rate in the online performance of UAV downlink mmWave communications.
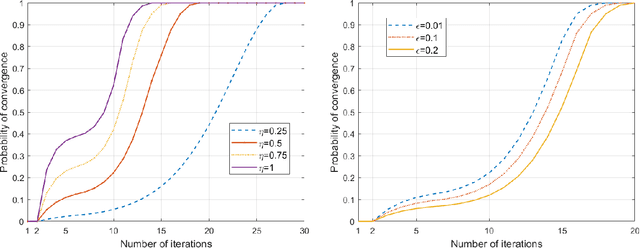
Brainstorming Generative Adversarial Networks (BGANs): Towards Multi-Agent Generative Models with Distributed Private Datasets
Feb 02, 2020

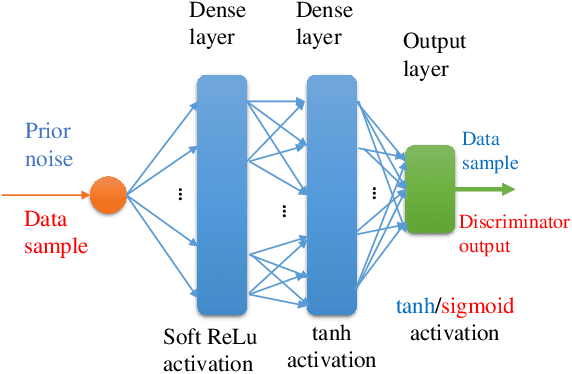
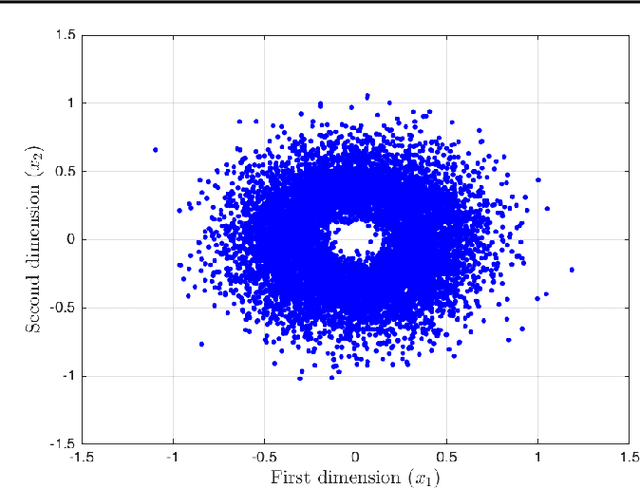
To achieve a high learning accuracy, generative adversarial networks (GANs) must be fed by large datasets that adequately represent the data space. However, in many scenarios, the available datasets may be limited and distributed across multiple agents, each of which is seeking to learn the distribution of the data on its own. In such scenarios, the local datasets are inherently private and agents often do not wish to share them. In this paper, to address this multi-agent GAN problem, a novel brainstorming GAN (BGAN) architecture is proposed using which multiple agents can generate real-like data samples while operating in a fully distributed manner and preserving their data privacy. BGAN allows the agents to gain information from other agents without sharing their real datasets but by "brainstorming" via the sharing of their generated data samples. Therefore, the proposed BGAN yields a higher accuracy compared with a standalone GAN model and its architecture is fully distributed and does not need any centralized controller. Moreover, BGANs are shown to be scalable and not dependent on the hyperparameters of the agents' deep neural networks (DNNs) thus enabling the agents to have different DNN architectures. Theoretically, the interactions between BGAN agents are analyzed as a game whose unique Nash equilibrium is derived. Experimental results show that BGAN can generate real-like data samples with higher quality compared to other distributed GAN architectures.
Generative Adversarial Networks for Distributed Intrusion Detection in the Internet of Things
Jun 03, 2019



To reap the benefits of the Internet of Things (IoT), it is imperative to secure the system against cyber attacks in order to enable mission critical and real-time applications. To this end, intrusion detection systems (IDSs) have been widely used to detect anomalies caused by a cyber attacker in IoT systems. However, due to the large-scale nature of the IoT, an IDS must operate in a distributed manner with minimum dependence on a central controller. Moreover, in many scenarios such as health and financial applications, the datasets are private and IoTDs may not intend to share such data. To this end, in this paper, a distributed generative adversarial network (GAN) is proposed to provide a fully distributed IDS for the IoT so as to detect anomalous behavior without reliance on any centralized controller. In this architecture, every IoTD can monitor its own data as well as neighbor IoTDs to detect internal and external attacks. In addition, the proposed distributed IDS does not require sharing the datasets between the IoTDs, thus, it can be implemented in IoTs that preserve the privacy of user data such as health monitoring systems or financial applications. It is shown analytically that the proposed distributed GAN has higher accuracy of detecting intrusion compared to a standalone IDS that has access to only a single IoTD dataset. Simulation results show that, the proposed distributed GAN-based IDS has up to 20% higher accuracy, 25% higher precision, and 60% lower false positive rate compared to a standalone GAN-based IDS.
Cyber-Physical Security and Safety of Autonomous Connected Vehicles: Optimal Control Meets Multi-Armed Bandit Learning
Dec 13, 2018


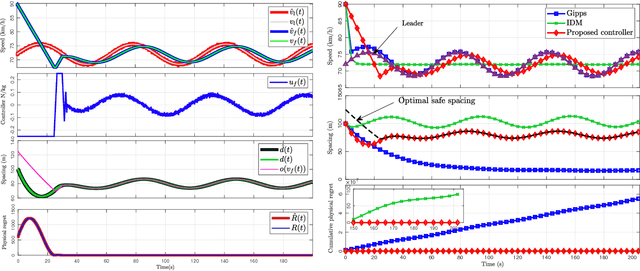
Autonomous connected vehicles (ACVs) rely on intra-vehicle sensors such as camera and radar as well as inter-vehicle communication to operate effectively. This reliance on cyber components exposes ACVs to cyber and physical attacks in which an adversary can manipulate sensor readings and physically take control of an ACV. In this paper, a comprehensive framework is proposed to thwart cyber and physical attacks on ACV networks. First, an optimal safe controller for ACVs is derived to maximize the street traffic flow while minimizing the risk of accidents by optimizing ACV speed and inter-ACV spacing. It is proven that the proposed controller is robust to physical attacks which aim at making ACV systems instable. To improve the cyber-physical security of ACV systems, next, data injection attack (DIA) detection approaches are proposed to address cyber attacks on sensors and their physical impact on the ACV system. To comprehensively design the DIA detection approaches, ACV sensors are characterized in two subsets based on the availability of a-priori information about their data. For sensors having a prior information, a DIA detection approach is proposed and an optimal threshold level is derived for the difference between the actual and estimated values of sensors data which enables ACV to stay robust against cyber attacks. For sensors having no prior information, a novel multi-armed bandit (MAB) algorithm is proposed to enable ACV to securely control its motion. Simulation results show that the proposed optimal safe controller outperforms current state of the art controllers by maximizing the robustness of ACVs to physical attacks. The results also show that the proposed DIA detection approaches, compared to Kalman filtering, can improve the security of ACV sensors against cyber attacks and ultimately improve the physical robustness of an ACV system.
Robust Deep Reinforcement Learning for Security and Safety in Autonomous Vehicle Systems
May 08, 2018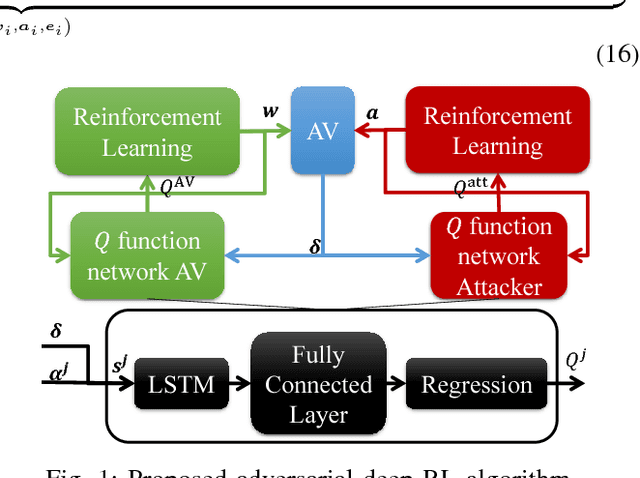
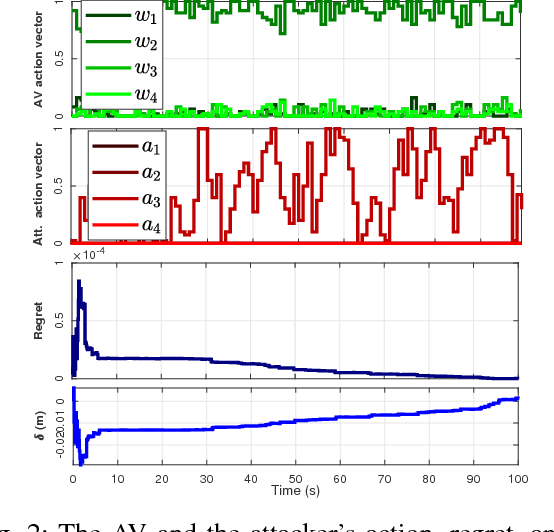
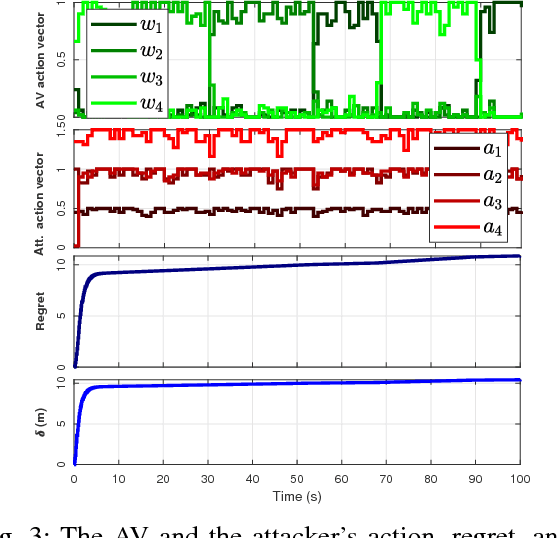
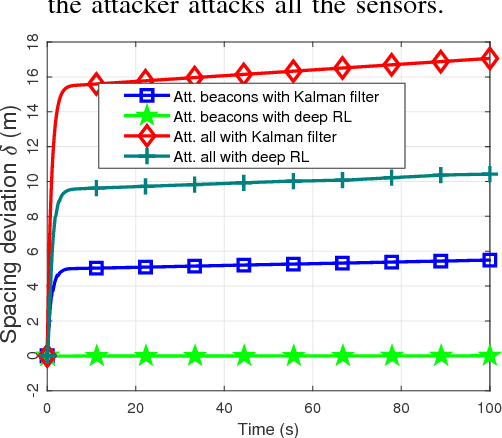
To operate effectively in tomorrow's smart cities, autonomous vehicles (AVs) must rely on intra-vehicle sensors such as camera and radar as well as inter-vehicle communication. Such dependence on sensors and communication links exposes AVs to cyber-physical (CP) attacks by adversaries that seek to take control of the AVs by manipulating their data. Thus, to ensure safe and optimal AV dynamics control, the data processing functions at AVs must be robust to such CP attacks. To this end, in this paper, the state estimation process for monitoring AV dynamics, in presence of CP attacks, is analyzed and a novel adversarial deep reinforcement learning (RL) algorithm is proposed to maximize the robustness of AV dynamics control to CP attacks. The attacker's action and the AV's reaction to CP attacks are studied in a game-theoretic framework. In the formulated game, the attacker seeks to inject faulty data to AV sensor readings so as to manipulate the inter-vehicle optimal safe spacing and potentially increase the risk of AV accidents or reduce the vehicle flow on the roads. Meanwhile, the AV, acting as a defender, seeks to minimize the deviations of spacing so as to ensure robustness to the attacker's actions. Since the AV has no information about the attacker's action and due to the infinite possibilities for data value manipulations, the outcome of the players' past interactions are fed to long-short term memory (LSTM) blocks. Each player's LSTM block learns the expected spacing deviation resulting from its own action and feeds it to its RL algorithm. Then, the the attacker's RL algorithm chooses the action which maximizes the spacing deviation, while the AV's RL algorithm tries to find the optimal action that minimizes such deviation.