 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMental Accounts for Actions: EWA-Inspired Attention in Decision Transformers
Sep 19, 2025Transformers have emerged as a compelling architecture for sequential decision-making by modeling trajectories via self-attention. In reinforcement learning (RL), they enable return-conditioned control without relying on value function approximation. Decision Transformers (DTs) exploit this by casting RL as supervised sequence modeling, but they are restricted to offline data and lack exploration. Online Decision Transformers (ODTs) address this limitation through entropy-regularized training on on-policy rollouts, offering a stable alternative to traditional RL methods like Soft Actor-Critic, which depend on bootstrapped targets and reward shaping. Despite these advantages, ODTs use standard attention, which lacks explicit memory of action-specific outcomes. This leads to inefficiencies in learning long-term action effectiveness. Inspired by cognitive models such as Experience-Weighted Attraction (EWA), we propose Experience-Weighted Attraction with Vector Quantization for Online Decision Transformers (EWA-VQ-ODT), a lightweight module that maintains per-action mental accounts summarizing recent successes and failures. Continuous actions are routed via direct grid lookup to a compact vector-quantized codebook, where each code stores a scalar attraction updated online through decay and reward-based reinforcement. These attractions modulate attention by biasing the columns associated with action tokens, requiring no change to the backbone or training objective. On standard continuous-control benchmarks, EWA-VQ-ODT improves sample efficiency and average return over ODT, particularly in early training. The module is computationally efficient, interpretable via per-code traces, and supported by theoretical guarantees that bound the attraction dynamics and its impact on attention drift.
Human-AI Collaboration in Cloud Security: Cognitive Hierarchy-Driven Deep Reinforcement Learning
Feb 22, 2025
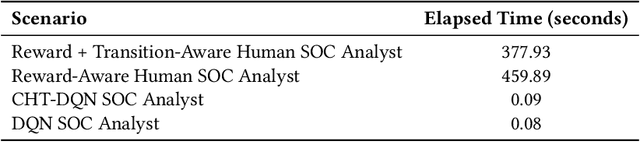


Given the complexity of multi-tenant cloud environments and the need for real-time threat mitigation, Security Operations Centers (SOCs) must integrate AI-driven adaptive defenses against Advanced Persistent Threats (APTs). However, SOC analysts struggle with countering adaptive adversarial tactics, necessitating intelligent decision-support frameworks. To enhance human-AI collaboration in SOCs, we propose a Cognitive Hierarchy Theory-driven Deep Q-Network (CHT-DQN) framework that models SOC analysts' decision-making against AI-driven APT bots. The SOC analyst (defender) operates at cognitive level-1, anticipating attacker strategies, while the APT bot (attacker) follows a level-0 exploitative policy. By incorporating CHT into DQN, our framework enhances SOC defense strategies via Attack Graph (AG)-based reinforcement learning. Simulation experiments across varying AG complexities show that CHT-DQN achieves higher data protection and lower action discrepancies compared to standard DQN. A theoretical lower bound analysis further validates its superior Q-value performance. A human-in-the-loop (HITL) evaluation on Amazon Mechanical Turk (MTurk) reveals that SOC analysts using CHT-DQN-driven transition probabilities align better with adaptive attackers, improving data protection. Additionally, human decision patterns exhibit risk aversion after failure and risk-seeking behavior after success, aligning with Prospect Theory. These findings underscore the potential of integrating cognitive modeling into deep reinforcement learning to enhance SOC operations and develop real-time adaptive cloud security mechanisms.
Space-Time Digitally-Coded Metamaterial Antenna Enabled Directional Modulation for Physical Layer Security
Nov 16, 2022Developing low-cost and scalable security solutions is vital to the advent of future large-scale wireless networks. Traditional cryptographic methods fail to meet the low-latency and scalability requirements of these networks due to their computational and key management complexity. On the other hand, physical layer (PHY) security has been put forth as a cost-effective alternative to cryptographic mechanisms that can circumvent the need for explicit key exchange between communication devices, owing to the fact that PHY security relies on the physics of the signal transmission for providing security. In this work, we propose a space-time-modulated digitally-coded metamaterial (MTM) leaky wave antenna (LWA) that can enable PHY security by achieving the functionalities of directional modulation (DM). From the theoretical perspective, we first show how the proposed space-time MTM antenna architecture can achieve DM through both the spatial and spectral manipulation of the orthogonal frequency division multiplexing (OFDM) signal received by a user equipment (UE). Simulation results are then provided as proof-of-principle, demonstrating the applicability of our approach for achieving DM in various communication settings. To further validate our simulation results, we realize a prototype of the proposed architecture controlled by a field-programmable gate array (FPGA), which achieves DM via an optimized coding sequence carried out by the branch-and-bound algorithm corresponding to the states of the MTM LWA's unit cells. Experimental results confirm the theory behind the space-time-modulated MTM LWA in achieving DM, which is observed via both the spectral harmonic patterns and bit error rate (BER) measurements.
Watch from sky: machine-learning-based multi-UAV network for predictive police surveillance
Mar 06, 2022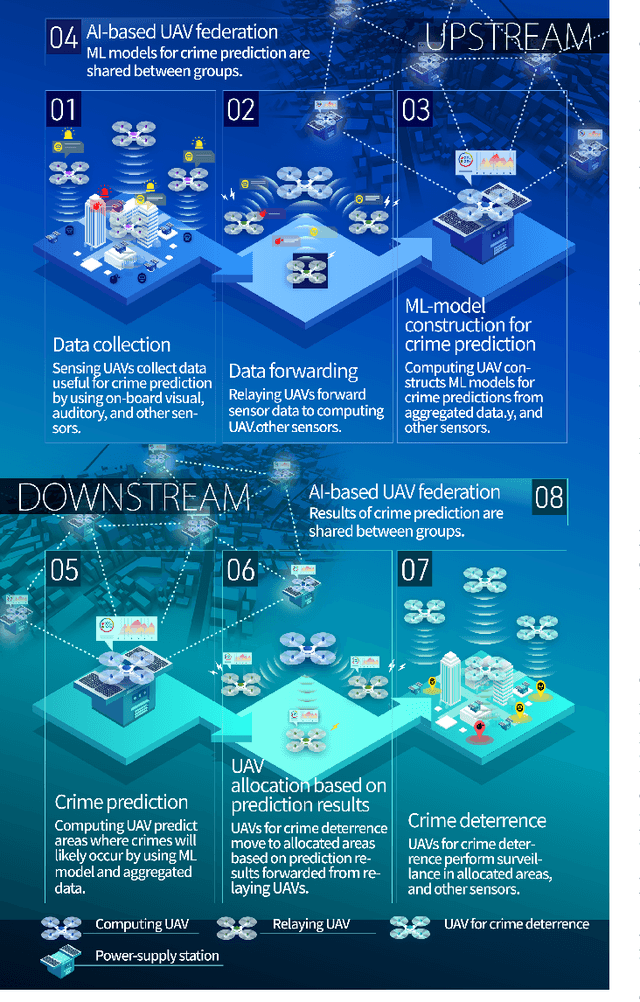
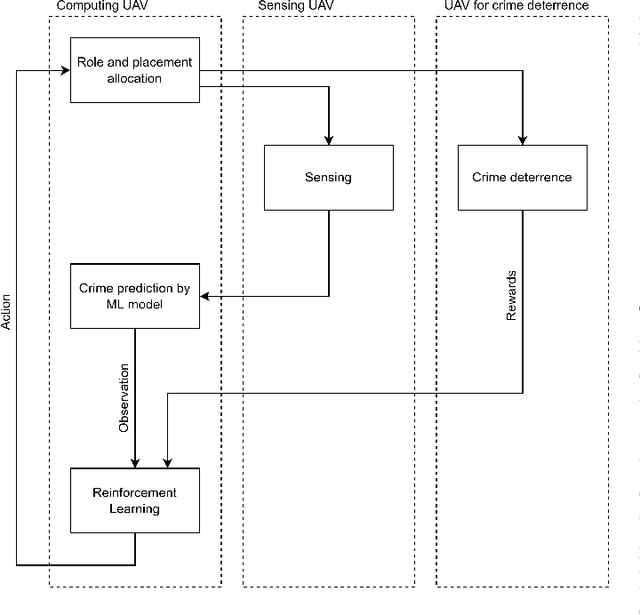
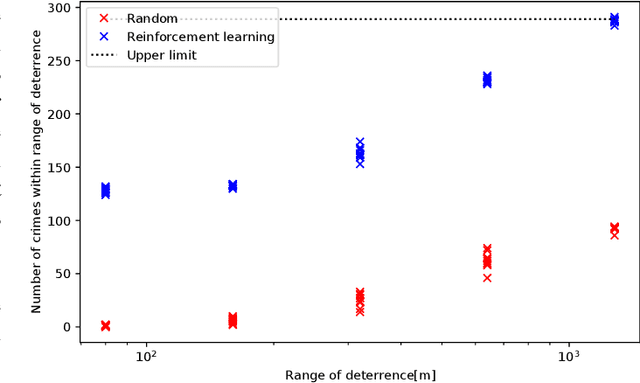
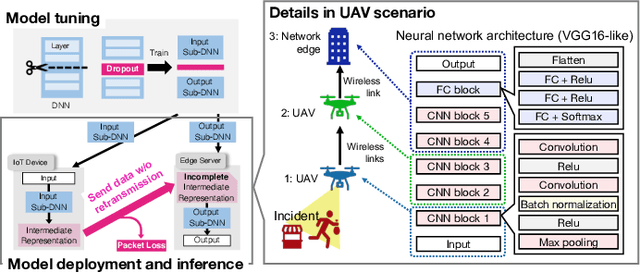
This paper presents the watch-from-sky framework, where multiple unmanned aerial vehicles (UAVs) play four roles, i.e., sensing, data forwarding, computing, and patrolling, for predictive police surveillance. Our framework is promising for crime deterrence because UAVs are useful for collecting and distributing data and have high mobility. Our framework relies on machine learning (ML) technology for controlling and dispatching UAVs and predicting crimes. This paper compares the conceptual model of our framework against the literature. It also reports a simulation of UAV dispatching using reinforcement learning and distributed ML inference over a lossy UAV network.
Network Traffic Shaping for Enhancing Privacy in IoT Systems
Nov 29, 2021

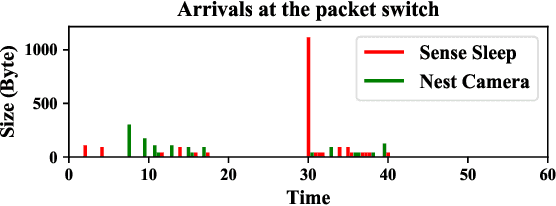
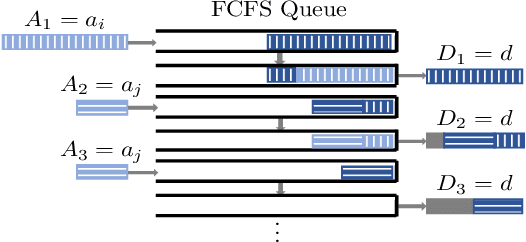
Motivated by privacy issues caused by inference attacks on user activities in the packet sizes and timing information of Internet of Things (IoT) network traffic, we establish a rigorous event-level differential privacy (DP) model on infinite packet streams. We propose a memoryless traffic shaping mechanism satisfying a first-come-first-served queuing discipline that outputs traffic dependent on the input using a DP mechanism. We show that in special cases the proposed mechanism recovers existing shapers which standardize the output independently from the input. To find the optimal shapers for given levels of privacy and transmission efficiency, we formulate the constrained problem of minimizing the expected delay per packet and propose using the expected queue size across time as a proxy. We further show that the constrained minimization is a convex program. We demonstrate the effect of shapers on both synthetic data and packet traces from actual IoT devices. The experimental results reveal inherent privacy-overhead tradeoffs: more shaping overhead provides better privacy protection. Under the same privacy level, there naturally exists a tradeoff between dummy traffic and delay. When dealing with heavier or less bursty input traffic, all shapers become more overhead-efficient. We also show that increased traffic from a larger number of IoT devices makes guaranteeing event-level privacy easier. The DP shaper offers tunable privacy that is invariant with the change in the input traffic distribution and has an advantage in handling burstiness over traffic-independent shapers. This approach well accommodates heterogeneous network conditions and enables users to adapt to their privacy/overhead demands.
A hybrid model-based and learning-based approach for classification using limited number of training samples
Jun 25, 2021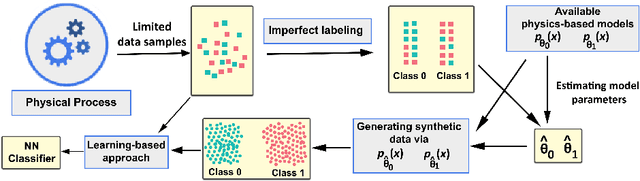
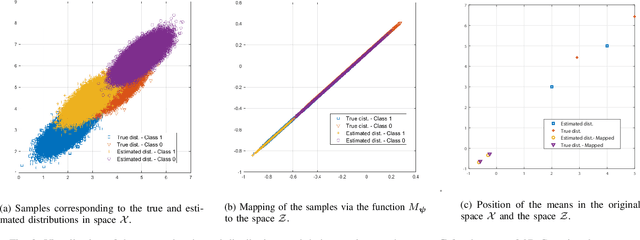
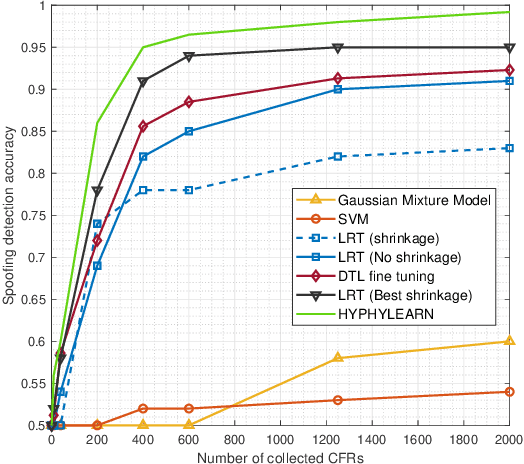
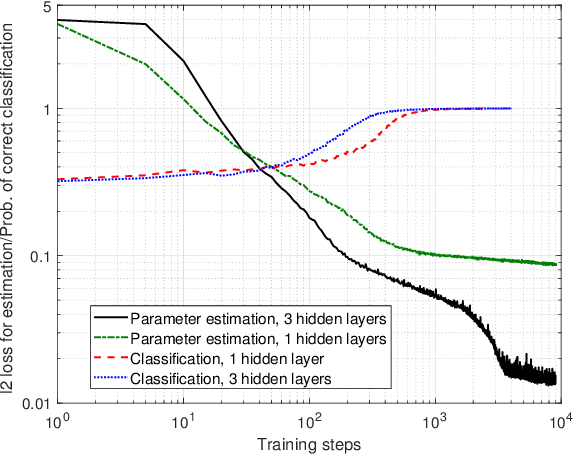
The fundamental task of classification given a limited number of training data samples is considered for physical systems with known parametric statistical models. The standalone learning-based and statistical model-based classifiers face major challenges towards the fulfillment of the classification task using a small training set. Specifically, classifiers that solely rely on the physics-based statistical models usually suffer from their inability to properly tune the underlying unobservable parameters, which leads to a mismatched representation of the system's behaviors. Learning-based classifiers, on the other hand, typically rely on a large number of training data from the underlying physical process, which might not be feasible in most practical scenarios. In this paper, a hybrid classification method -- termed HyPhyLearn -- is proposed that exploits both the physics-based statistical models and the learning-based classifiers. The proposed solution is based on the conjecture that HyPhyLearn would alleviate the challenges associated with the individual approaches of learning-based and statistical model-based classifiers by fusing their respective strengths. The proposed hybrid approach first estimates the unobservable model parameters using the available (suboptimal) statistical estimation procedures, and subsequently use the physics-based statistical models to generate synthetic data. Then, the training data samples are incorporated with the synthetic data in a learning-based classifier that is based on domain-adversarial training of neural networks. Specifically, in order to address the mismatch problem, the classifier learns a mapping from the training data and the synthetic data to a common feature space. Simultaneously, the classifier is trained to find discriminative features within this space in order to fulfill the classification task.
Estimation of Individual Device Contributions for Incentivizing Federated Learning
Sep 20, 2020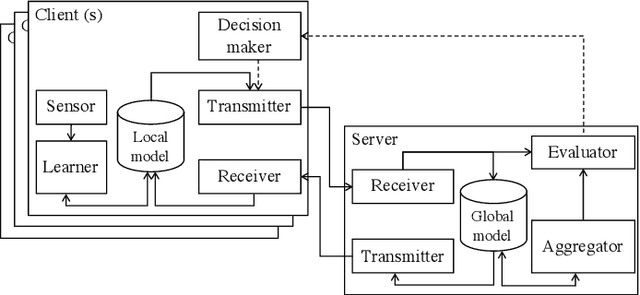
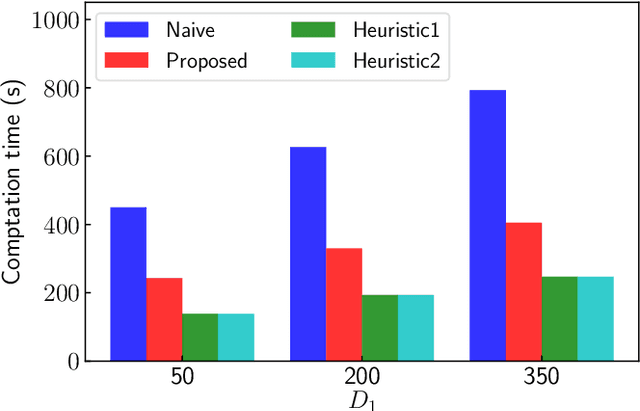
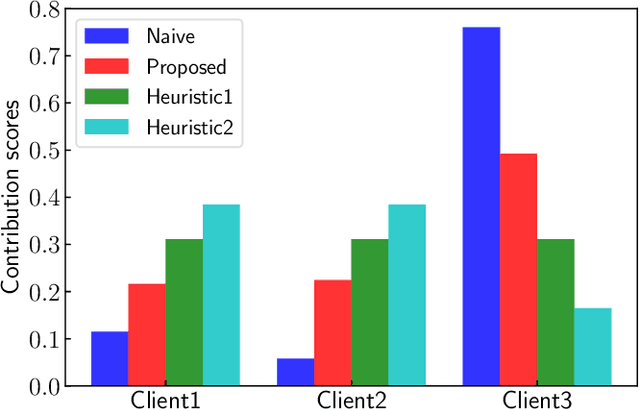
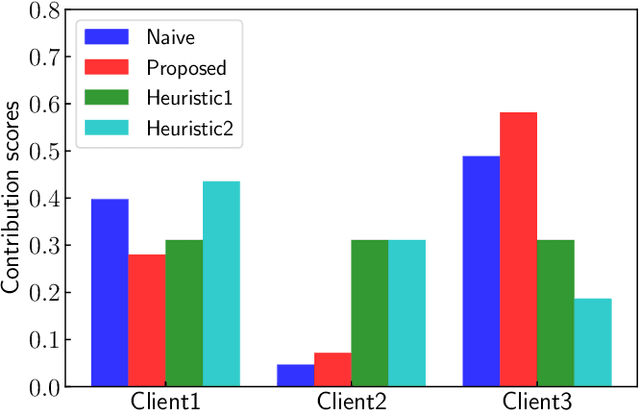
Federated learning (FL) is an emerging technique used to train a machine-learning model collaboratively using the data and computation resource of the mobile devices without exposing privacy-sensitive user data. Appropriate incentive mechanisms that motivate the data and mobile-device owner to participate in FL is key to building a sustainable platform for FL. However, it is difficult to evaluate the contribution level of the devices/owners to determine appropriate rewards without large computation and communication overhead. This paper proposes a computation-and communication-efficient method of estimating a participating device's contribution level. The proposed method enables such estimation during a single FL training process, there by reducing the need for traffic and computation overhead. The performance evaluations using the MNIST dataset show that the proposed method estimates individual participants' contributions accurately with 46-49% less computation overhead and no communication overhead than a naive estimation method.
Learning-Aided Physical Layer Attacks Against Multicarrier Communications in IoT
Aug 01, 2019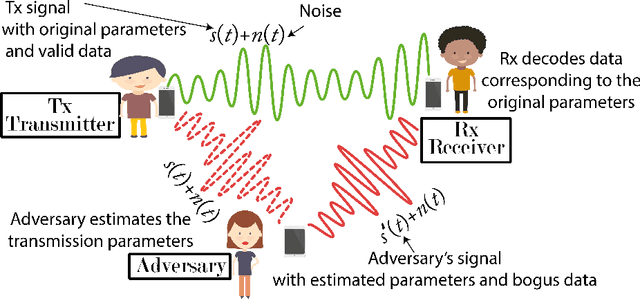
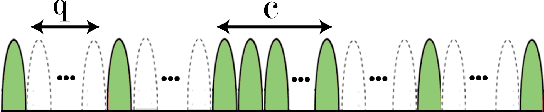

Internet-of-Things (IoT) devices that are limited in power and processing capabilities are susceptible to physical layer (PHY) spoofing attacks owing to their inability to implement a full-blown protocol stack for security. The overwhelming adoption of multicarrier communications for the PHY layer makes IoT devices further vulnerable to PHY spoofing attacks. These attacks which aim at injecting bogus data into the receiver, involve inferring transmission parameters and finding PHY characteristics of the transmitted signals so as to spoof the received signal. Non-contiguous orthogonal frequency division multiplexing (NC-OFDM) systems have been argued to have low probability of exploitation (LPE) characteristics against classic attacks based on cyclostationary analysis. However, with the advent of machine learning (ML) algorithms, adversaries can devise data-driven attacks to compromise such systems. It is in this vein that PHY spoofing performance of adversaries equipped with supervised and unsupervised ML tools are investigated in this paper. The supervised ML approach is based on estimation/classification utilizing deep neural networks (DNN) while the unsupervised one employs variational autoencoders (VAEs). In particular, VAEs are shown to be capable of learning representations from NC-OFDM signals related to their PHY characteristics such as frequency pattern and modulation scheme, which are useful for PHY spoofing. In addition, a new metric based on the disentanglement principle is proposed to measure the quality of such learned representations. Simulation results demonstrate that the performance of the spoofing adversaries highly depends on the subcarriers' allocation patterns used at the transmitter. Particularly, it is shown that utilizing a random subcarrier occupancy pattern precludes the adversary from spoofing and secures NC-OFDM systems against ML-based attacks.
Learning-based Resource Optimization in Ultra Reliable Low Latency HetNets
May 12, 2019
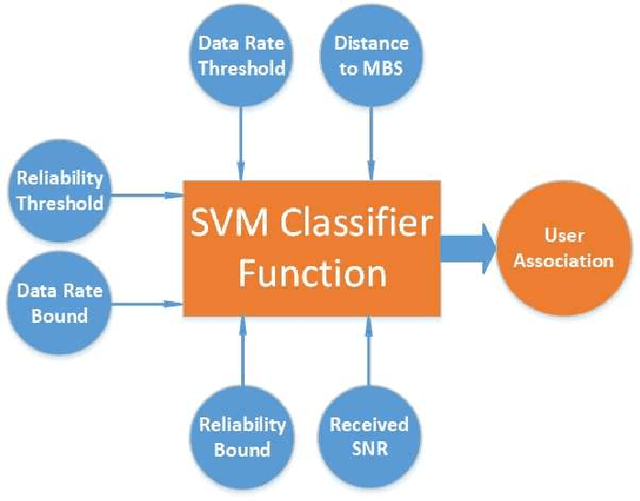
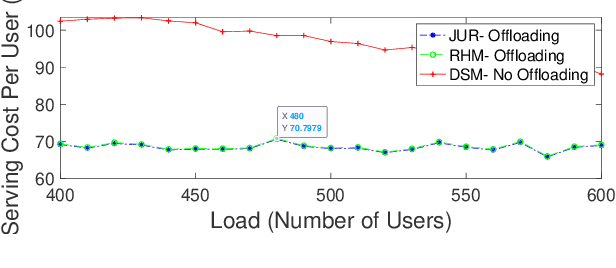
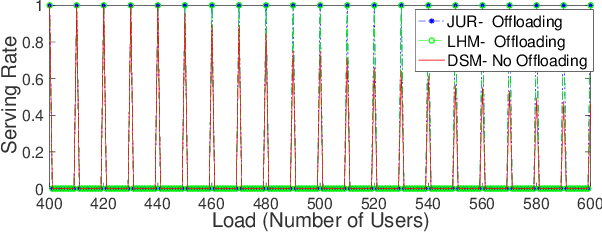
In this paper, the problems of user offloading and resource optimization are jointly addressed to support ultra-reliable and low latency communications (URLLC) in HetNets. In particular, a multi-tier network with a single macro base station (MBS) and multiple overlaid small cell base stations (SBSs) is considered that includes users with different latency and reliability constraints. Modeling the latency and reliability constraints of users with probabilistic guarantees, the joint problem of user offloading and resource allocation (JUR) in a URLLC setting is formulated as an optimization problem to minimize the cost of serving users for the MBS. In the considered scheme, SBSs bid to serve URLLC users under their coverage at a given price, and the MBS decides whether to serve each user locally or to offload it to one of the overlaid SBSs. Since the JUR optimization is NP-hard, we propose a low complexity learning-based heuristic method (LHM) which includes a support vector machine-based user association model and a convex resource optimization (CRO) algorithm. To further reduce the delay, we propose an alternating direction method of multipliers (ADMM)-based solution to the CRO problem. Simulation results show that using LHM, the MBS significantly decreases the spectrum access delay for users (by $\sim$ 93\%) as compared to JUR, while also reducing its bandwidth and power costs in serving users (by $\sim$ 33\%) as compared to directly serving users without offloading.
Cyber-Physical Security and Safety of Autonomous Connected Vehicles: Optimal Control Meets Multi-Armed Bandit Learning
Dec 13, 2018


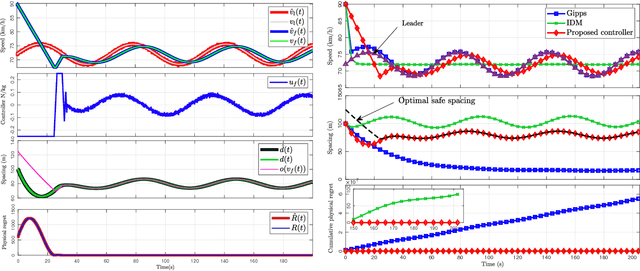
Autonomous connected vehicles (ACVs) rely on intra-vehicle sensors such as camera and radar as well as inter-vehicle communication to operate effectively. This reliance on cyber components exposes ACVs to cyber and physical attacks in which an adversary can manipulate sensor readings and physically take control of an ACV. In this paper, a comprehensive framework is proposed to thwart cyber and physical attacks on ACV networks. First, an optimal safe controller for ACVs is derived to maximize the street traffic flow while minimizing the risk of accidents by optimizing ACV speed and inter-ACV spacing. It is proven that the proposed controller is robust to physical attacks which aim at making ACV systems instable. To improve the cyber-physical security of ACV systems, next, data injection attack (DIA) detection approaches are proposed to address cyber attacks on sensors and their physical impact on the ACV system. To comprehensively design the DIA detection approaches, ACV sensors are characterized in two subsets based on the availability of a-priori information about their data. For sensors having a prior information, a DIA detection approach is proposed and an optimal threshold level is derived for the difference between the actual and estimated values of sensors data which enables ACV to stay robust against cyber attacks. For sensors having no prior information, a novel multi-armed bandit (MAB) algorithm is proposed to enable ACV to securely control its motion. Simulation results show that the proposed optimal safe controller outperforms current state of the art controllers by maximizing the robustness of ACVs to physical attacks. The results also show that the proposed DIA detection approaches, compared to Kalman filtering, can improve the security of ACV sensors against cyber attacks and ultimately improve the physical robustness of an ACV system.