 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature-based model selection for object detection from point cloud data
Sep 26, 2022
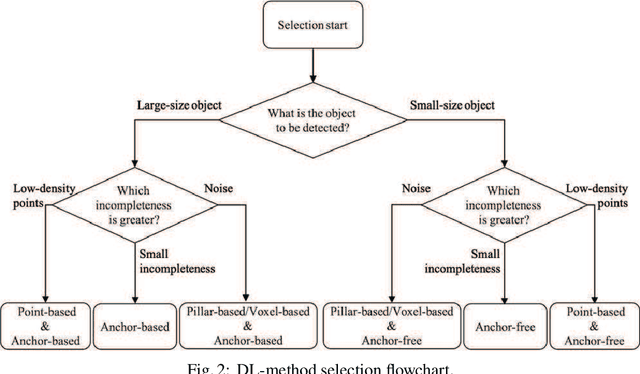
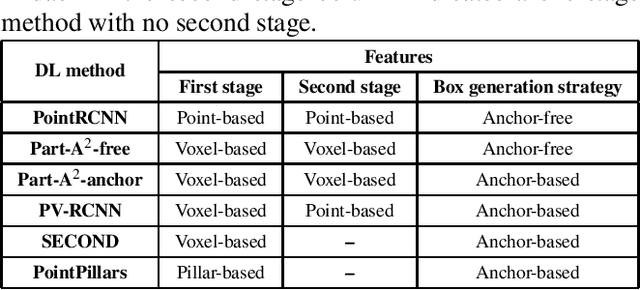
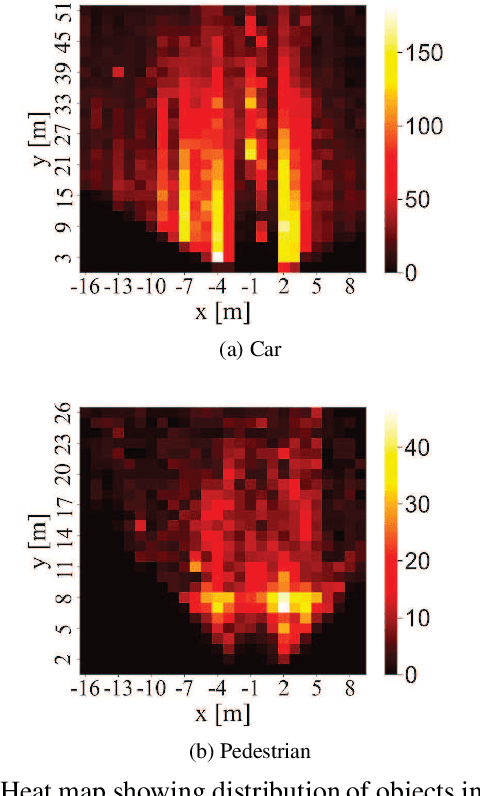
Smart monitoring using three-dimensional (3D) image sensors has been attracting attention in the context of smart cities. In smart monitoring, object detection from point cloud data acquired by 3D image sensors is implemented for detecting moving objects such as vehicles and pedestrians to ensure safety on the road. However, the features of point cloud data are diversified due to the characteristics of light detection and ranging (LIDAR) units used as 3D image sensors or the install position of the 3D image sensors. Although a variety of deep learning (DL) models for object detection from point cloud data have been studied to date, no research has considered how to use multiple DL models in accordance with the features of the point cloud data. In this work, we propose a feature-based model selection framework that creates various DL models by using multiple DL methods and by utilizing training data with pseudo incompleteness generated by two artificial techniques: sampling and noise adding. It selects the most suitable DL model for the object detection task in accordance with the features of the point cloud data acquired in the real environment. To demonstrate the effectiveness of the proposed framework, we compare the performance of multiple DL models using benchmark datasets created from the KITTI dataset and present example results of object detection obtained through a real outdoor experiment. Depending on the situation, the detection accuracy varies up to 32% between DL models, which confirms the importance of selecting an appropriate DL model according to the situation.
Watch from sky: machine-learning-based multi-UAV network for predictive police surveillance
Mar 06, 2022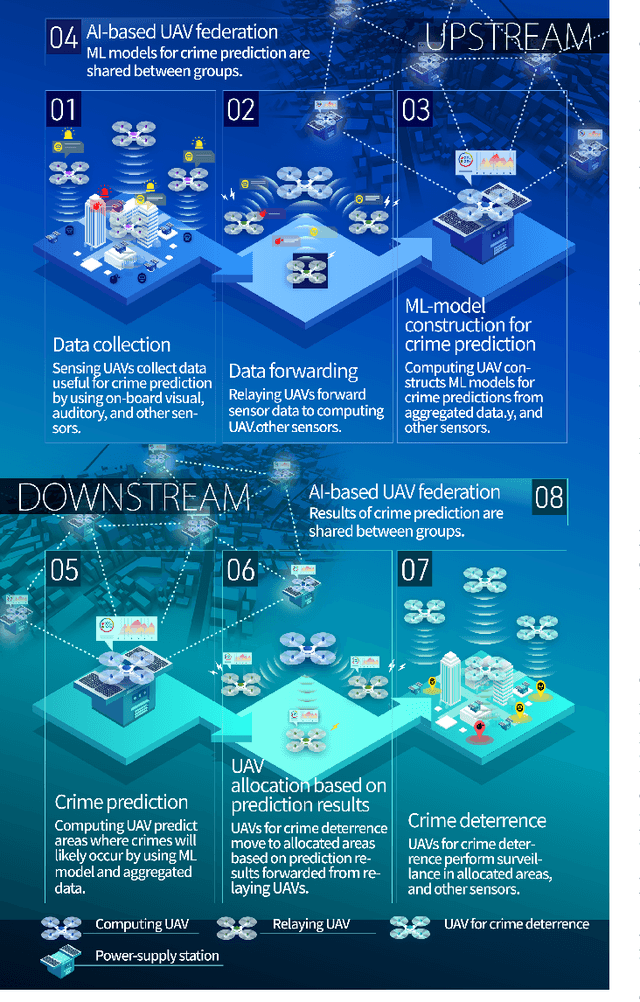
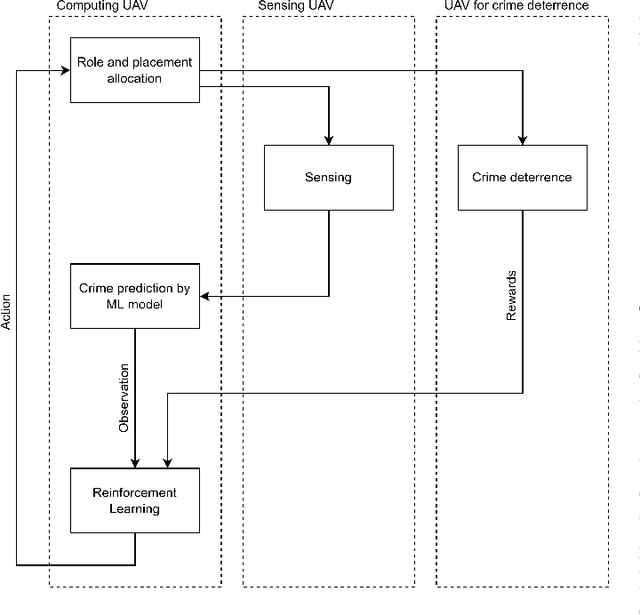
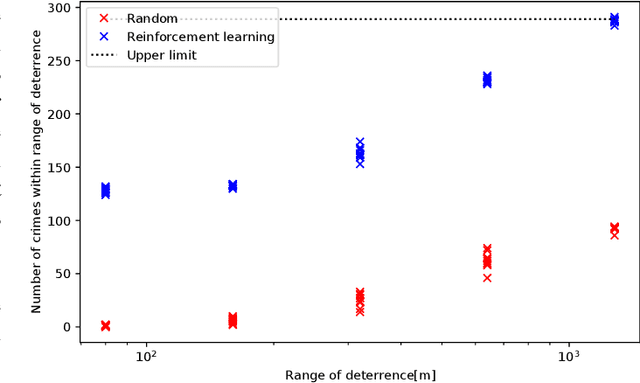
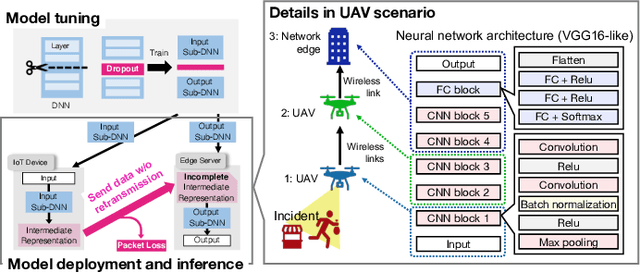
This paper presents the watch-from-sky framework, where multiple unmanned aerial vehicles (UAVs) play four roles, i.e., sensing, data forwarding, computing, and patrolling, for predictive police surveillance. Our framework is promising for crime deterrence because UAVs are useful for collecting and distributing data and have high mobility. Our framework relies on machine learning (ML) technology for controlling and dispatching UAVs and predicting crimes. This paper compares the conceptual model of our framework against the literature. It also reports a simulation of UAV dispatching using reinforcement learning and distributed ML inference over a lossy UAV network.
Estimation of Individual Device Contributions for Incentivizing Federated Learning
Sep 20, 2020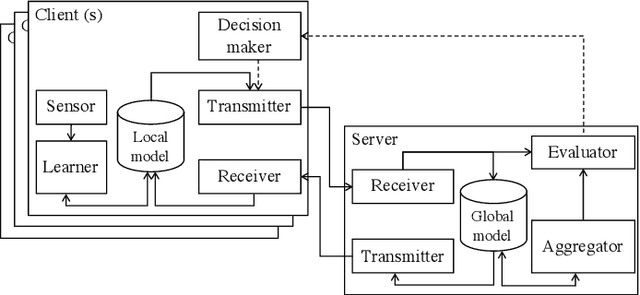
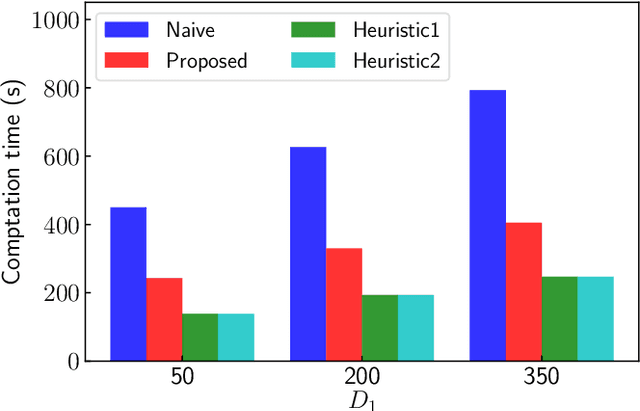
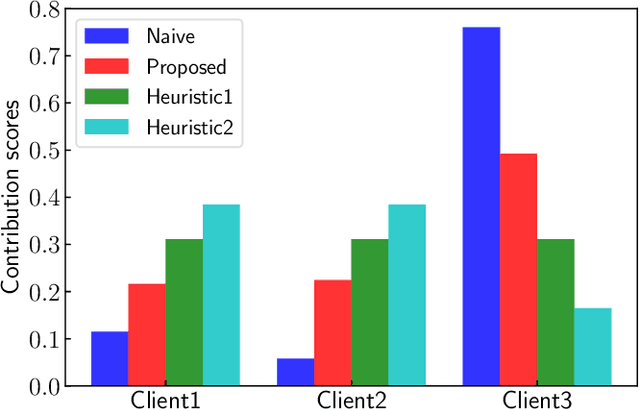
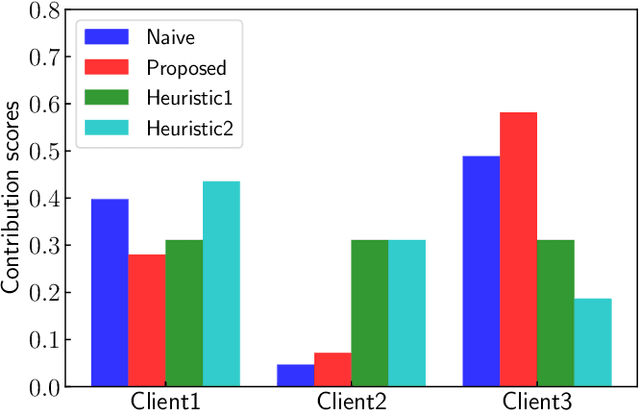
Federated learning (FL) is an emerging technique used to train a machine-learning model collaboratively using the data and computation resource of the mobile devices without exposing privacy-sensitive user data. Appropriate incentive mechanisms that motivate the data and mobile-device owner to participate in FL is key to building a sustainable platform for FL. However, it is difficult to evaluate the contribution level of the devices/owners to determine appropriate rewards without large computation and communication overhead. This paper proposes a computation-and communication-efficient method of estimating a participating device's contribution level. The proposed method enables such estimation during a single FL training process, there by reducing the need for traffic and computation overhead. The performance evaluations using the MNIST dataset show that the proposed method estimates individual participants' contributions accurately with 46-49% less computation overhead and no communication overhead than a naive estimation method.