Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatch from sky: machine-learning-based multi-UAV network for predictive police surveillance
Paper and Code
Mar 06, 2022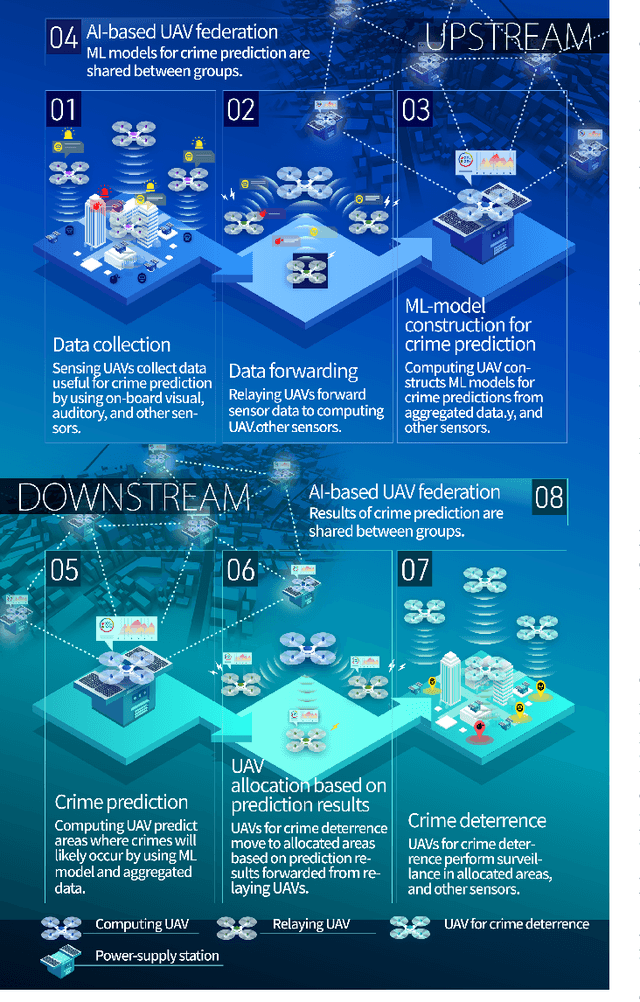
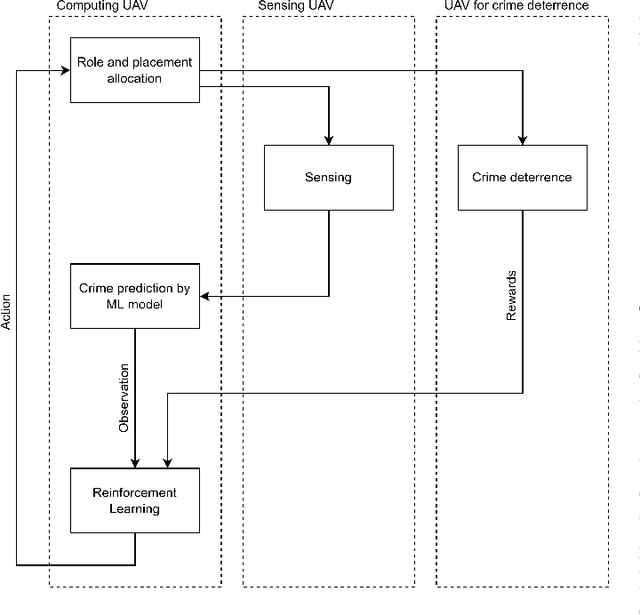
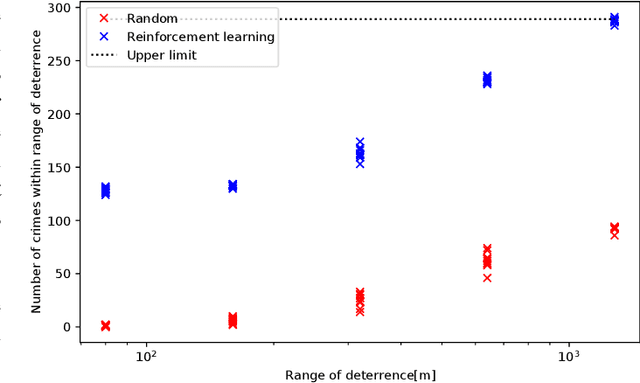
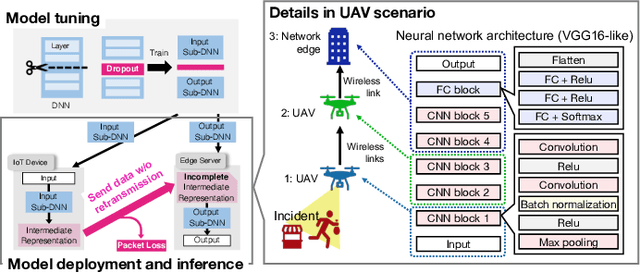
This paper presents the watch-from-sky framework, where multiple unmanned aerial vehicles (UAVs) play four roles, i.e., sensing, data forwarding, computing, and patrolling, for predictive police surveillance. Our framework is promising for crime deterrence because UAVs are useful for collecting and distributing data and have high mobility. Our framework relies on machine learning (ML) technology for controlling and dispatching UAVs and predicting crimes. This paper compares the conceptual model of our framework against the literature. It also reports a simulation of UAV dispatching using reinforcement learning and distributed ML inference over a lossy UAV network.
View paper on