 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvergence of Communications, Control, and Machine Learning for Secure and Autonomous Vehicle Navigation
Jul 05, 2023Connected and autonomous vehicles (CAVs) can reduce human errors in traffic accidents, increase road efficiency, and execute various tasks ranging from delivery to smart city surveillance. Reaping these benefits requires CAVs to autonomously navigate to target destinations. To this end, each CAV's navigation controller must leverage the information collected by sensors and wireless systems for decision-making on longitudinal and lateral movements. However, enabling autonomous navigation for CAVs requires a convergent integration of communication, control, and learning systems. The goal of this article is to explicitly expose the challenges related to this convergence and propose solutions to address them in two major use cases: Uncoordinated and coordinated CAVs. In particular, challenges related to the navigation of uncoordinated CAVs include stable path tracking, robust control against cyber-physical attacks, and adaptive navigation controller design. Meanwhile, when multiple CAVs coordinate their movements during navigation, fundamental problems such as stable formation, fast collaborative learning, and distributed intrusion detection are analyzed. For both cases, solutions using the convergence of communication theory, control theory, and machine learning are proposed to enable effective and secure CAV navigation. Preliminary simulation results are provided to show the merits of proposed solutions.
Wireless-Enabled Asynchronous Federated Fourier Neural Network for Turbulence Prediction in Urban Air Mobility (UAM)
Dec 26, 2021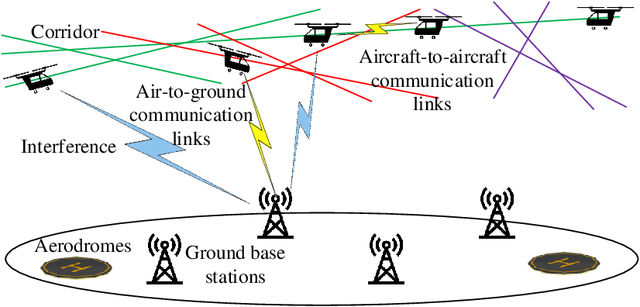
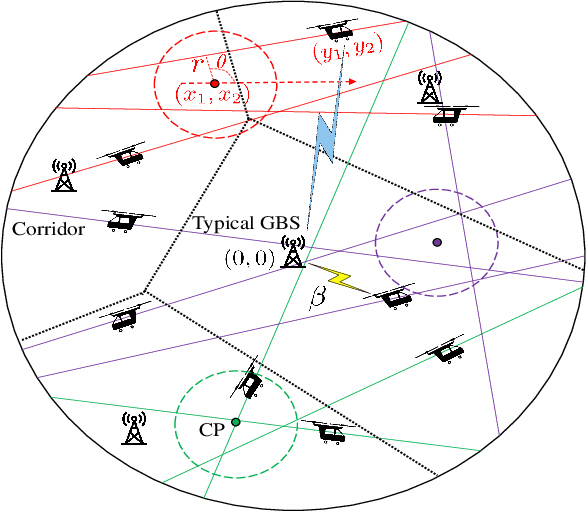
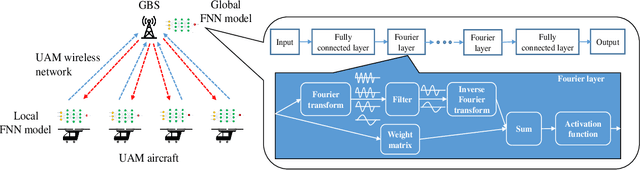

To meet the growing mobility needs in intra-city transportation, the concept of urban air mobility (UAM) has been proposed in which vertical takeoff and landing (VTOL) aircraft are used to provide a ride-hailing service. In UAM, aircraft can operate in designated air spaces known as corridors, that link the aerodromes. A reliable communication network between GBSs and aircraft enables UAM to adequately utilize the airspace and create a fast, efficient, and safe transportation system. In this paper, to characterize the wireless connectivity performance for UAM, a spatial model is proposed. For this setup, the distribution of the distance between an arbitrarily selected GBS and its associated aircraft and the Laplace transform of the interference experienced by the GBS are derived. Using these results, the signal-to-interference ratio (SIR)-based connectivity probability is determined to capture the connectivity performance of the UAM aircraft-to-ground communication network. Then, leveraging these connectivity results, a wireless-enabled asynchronous federated learning (AFL) framework that uses a Fourier neural network is proposed to tackle the challenging problem of turbulence prediction during UAM operations. For this AFL scheme, a staleness-aware global aggregation scheme is introduced to expedite the convergence to the optimal turbulence prediction model used by UAM aircraft. Simulation results validate the theoretical derivations for the UAM wireless connectivity. The results also demonstrate that the proposed AFL framework converges to the optimal turbulence prediction model faster than the synchronous federated learning baselines and a staleness-free AFL approach. Furthermore, the results characterize the performance of wireless connectivity and convergence of the aircraft's turbulence model under different parameter settings, offering useful UAM design guidelines.
Federated Learning on the Road: Autonomous Controller Design for Connected and Autonomous Vehicles
Feb 05, 2021



A new federated learning (FL) framework enabled by large-scale wireless connectivity is proposed for designing the autonomous controller of connected and autonomous vehicles (CAVs). In this framework, the learning models used by the controllers are collaboratively trained among a group of CAVs. To capture the varying CAV participation in the FL training process and the diverse local data quality among CAVs, a novel dynamic federated proximal (DFP) algorithm is proposed that accounts for the mobility of CAVs, the wireless fading channels, as well as the unbalanced and nonindependent and identically distributed data across CAVs. A rigorous convergence analysis is performed for the proposed algorithm to identify how fast the CAVs converge to using the optimal autonomous controller. In particular, the impacts of varying CAV participation in the FL process and diverse CAV data quality on the convergence of the proposed DFP algorithm are explicitly analyzed. Leveraging this analysis, an incentive mechanism based on contract theory is designed to improve the FL convergence speed. Simulation results using real vehicular data traces show that the proposed DFP-based controller can accurately track the target CAV speed over time and under different traffic scenarios. Moreover, the results show that the proposed DFP algorithm has a much faster convergence compared to popular FL algorithms such as federated averaging (FedAvg) and federated proximal (FedProx). The results also validate the feasibility of the contract-theoretic incentive mechanism and show that the proposed mechanism can improve the convergence speed of the DFP algorithm by 40% compared to the baselines.
Federated Learning in the Sky: Joint Power Allocation and Scheduling with UAV Swarms
Feb 19, 2020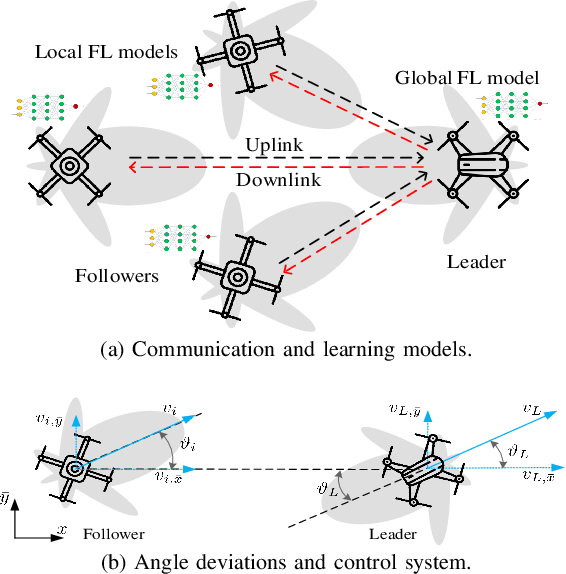
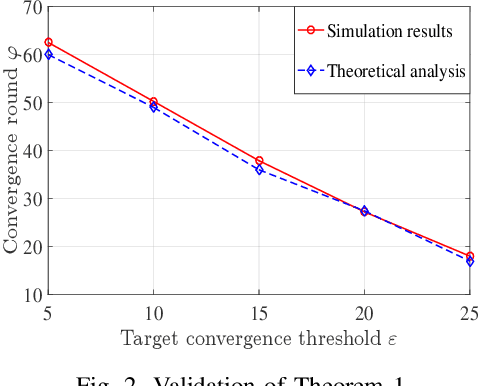

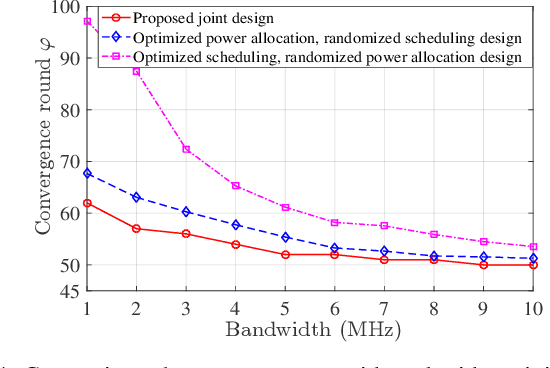
Unmanned aerial vehicle (UAV) swarms must exploit machine learning (ML) in order to execute various tasks ranging from coordinated trajectory planning to cooperative target recognition. However, due to the lack of continuous connections between the UAV swarm and ground base stations (BSs), using centralized ML will be challenging, particularly when dealing with a large volume of data. In this paper, a novel framework is proposed to implement distributed federated learning (FL) algorithms within a UAV swarm that consists of a leading UAV and several following UAVs. Each following UAV trains a local FL model based on its collected data and then sends this trained local model to the leading UAV who will aggregate the received models, generate a global FL model, and transmit it to followers over the intra-swarm network. To identify how wireless factors, like fading, transmission delay, and UAV antenna angle deviations resulting from wind and mechanical vibrations, impact the performance of FL, a rigorous convergence analysis for FL is performed. Then, a joint power allocation and scheduling design is proposed to optimize the convergence rate of FL while taking into account the energy consumption during convergence and the delay requirement imposed by the swarm's control system. Simulation results validate the effectiveness of the FL convergence analysis and show that the joint design strategy can reduce the number of communication rounds needed for convergence by as much as 35% compared with the baseline design.