 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaDAR: Relation-aware Diffusion-Asymmetric Graph Contrastive Learning for Recommendation
Mar 17, 2026Collaborative filtering (CF) recommendation has been significantly advanced by integrating Graph Neural Networks (GNNs) and Graph Contrastive Learning (GCL). However, (i) random edge perturbations often distort critical structural signals and degrade semantic consistency across augmented views, and (ii) data sparsity hampers the propagation of collaborative signals, limiting generalization. To tackle these challenges, we propose RaDAR (Relation-aware Diffusion-Asymmetric Graph Contrastive Learning Framework for Recommendation Systems), a novel framework that combines two complementary view generation mechanisms: a graph generative model to capture global structure and a relation-aware denoising model to refine noisy edges. RaDAR introduces three key innovations: (1) asymmetric contrastive learning with global negative sampling to maintain semantic alignment while suppressing noise; (2) diffusion-guided augmentation, which employs progressive noise injection and denoising for enhanced robustness; and (3) relation-aware edge refinement, dynamically adjusting edge weights based on latent node semantics. Extensive experiments on three public benchmarks demonstrate that RaDAR consistently outperforms state-of-the-art methods, particularly under noisy and sparse conditions.
* 12 pages, 5 figures. Accepted at WWW 2026
InternAgent-1.5: A Unified Agentic Framework for Long-Horizon Autonomous Scientific Discovery
Feb 09, 2026We introduce InternAgent-1.5, a unified system designed for end-to-end scientific discovery across computational and empirical domains. The system is built on a structured architecture composed of three coordinated subsystems for generation, verification, and evolution. These subsystems are supported by foundational capabilities for deep research, solution optimization, and long horizon memory. The architecture allows InternAgent-1.5 to operate continuously across extended discovery cycles while maintaining coherent and improving behavior. It also enables the system to coordinate computational modeling and laboratory experimentation within a single unified system. We evaluate InternAgent-1.5 on scientific reasoning benchmarks such as GAIA, HLE, GPQA, and FrontierScience, and the system achieves leading performance that demonstrates strong foundational capabilities. Beyond these benchmarks, we further assess two categories of discovery tasks. In algorithm discovery tasks, InternAgent-1.5 autonomously designs competitive methods for core machine learning problems. In empirical discovery tasks, it executes complete computational or wet lab experiments and produces scientific findings in earth, life, biological, and physical domains. Overall, these results show that InternAgent-1.5 provides a general and scalable framework for autonomous scientific discovery.
CoFi-Dec: Hallucination-Resistant Decoding via Coarse-to-Fine Generative Feedback in Large Vision-Language Models
Dec 29, 2025Large Vision-Language Models (LVLMs) have achieved impressive progress in multi-modal understanding and generation. However, they still tend to produce hallucinated content that is inconsistent with the visual input, which limits their reliability in real-world applications. We propose \textbf{CoFi-Dec}, a training-free decoding framework that mitigates hallucinations by integrating generative self-feedback with coarse-to-fine visual conditioning. Inspired by the human visual process from global scene perception to detailed inspection, CoFi-Dec first generates two intermediate textual responses conditioned on coarse- and fine-grained views of the original image. These responses are then transformed into synthetic images using a text-to-image model, forming multi-level visual hypotheses that enrich grounding cues. To unify the predictions from these multiple visual conditions, we introduce a Wasserstein-based fusion mechanism that aligns their predictive distributions into a geometrically consistent decoding trajectory. This principled fusion reconciles high-level semantic consistency with fine-grained visual grounding, leading to more robust and faithful outputs. Extensive experiments on six hallucination-focused benchmarks show that CoFi-Dec substantially reduces both entity-level and semantic-level hallucinations, outperforming existing decoding strategies. The framework is model-agnostic, requires no additional training, and can be seamlessly applied to a wide range of LVLMs. The implementation is available at https://github.com/AI-Researcher-Team/CoFi-Dec.
PurifyGen: A Risk-Discrimination and Semantic-Purification Model for Safe Text-to-Image Generation
Dec 29, 2025Recent advances in diffusion models have notably enhanced text-to-image (T2I) generation quality, but they also raise the risk of generating unsafe content. Traditional safety methods like text blacklisting or harmful content classification have significant drawbacks: they can be easily circumvented or require extensive datasets and extra training. To overcome these challenges, we introduce PurifyGen, a novel, training-free approach for safe T2I generation that retains the model's original weights. PurifyGen introduces a dual-stage strategy for prompt purification. First, we evaluate the safety of each token in a prompt by computing its complementary semantic distance, which measures the semantic proximity between the prompt tokens and concept embeddings from predefined toxic and clean lists. This enables fine-grained prompt classification without explicit keyword matching or retraining. Tokens closer to toxic concepts are flagged as risky. Second, for risky prompts, we apply a dual-space transformation: we project toxic-aligned embeddings into the null space of the toxic concept matrix, effectively removing harmful semantic components, and simultaneously align them into the range space of clean concepts. This dual alignment purifies risky prompts by both subtracting unsafe semantics and reinforcing safe ones, while retaining the original intent and coherence. We further define a token-wise strategy to selectively replace only risky token embeddings, ensuring minimal disruption to safe content. PurifyGen offers a plug-and-play solution with theoretical grounding and strong generalization to unseen prompts and models. Extensive testing shows that PurifyGen surpasses current methods in reducing unsafe content across five datasets and competes well with training-dependent approaches. The code can refer to https://github.com/AI-Researcher-Team/PurifyGen.
TV-RAG: A Temporal-aware and Semantic Entropy-Weighted Framework for Long Video Retrieval and Understanding
Dec 29, 2025Large Video Language Models (LVLMs) have rapidly emerged as the focus of multimedia AI research. Nonetheless, when confronted with lengthy videos, these models struggle: their temporal windows are narrow, and they fail to notice fine-grained semantic shifts that unfold over extended durations. Moreover, mainstream text-based retrieval pipelines, which rely chiefly on surface-level lexical overlap, ignore the rich temporal interdependence among visual, audio, and subtitle channels. To mitigate these limitations, we propose TV-RAG, a training-free architecture that couples temporal alignment with entropy-guided semantics to improve long-video reasoning. The framework contributes two main mechanisms: \emph{(i)} a time-decay retrieval module that injects explicit temporal offsets into the similarity computation, thereby ranking text queries according to their true multimedia context; and \emph{(ii)} an entropy-weighted key-frame sampler that selects evenly spaced, information-dense frames, reducing redundancy while preserving representativeness. By weaving these temporal and semantic signals together, TV-RAG realises a dual-level reasoning routine that can be grafted onto any LVLM without re-training or fine-tuning. The resulting system offers a lightweight, budget-friendly upgrade path and consistently surpasses most leading baselines across established long-video benchmarks such as Video-MME, MLVU, and LongVideoBench, confirming the effectiveness of our model. The code can be found at https://github.com/AI-Researcher-Team/TV-RAG.
KAAE: Numerical Reasoning for Knowledge Graphs via Knowledge-aware Attributes Learning
Nov 20, 2024



Numerical reasoning is pivotal in various artificial intelligence applications, such as natural language processing and recommender systems, where it involves using entities, relations, and attribute values (e.g., weight, length) to infer new factual relations (e.g., the Nile is longer than the Amazon). However, existing approaches encounter two critical challenges in modeling: (1) semantic relevance-the challenge of insufficiently capturing the necessary contextual interactions among entities, relations, and numerical attributes, often resulting in suboptimal inference; and (2) semantic ambiguity-the difficulty in accurately distinguishing ordinal relationships during numerical reasoning, which compromises the generation of high-quality samples and limits the effectiveness of contrastive learning. To address these challenges, we propose the novel Knowledge-Aware Attributes Embedding model (KAAE) for knowledge graph embeddings in numerical reasoning. Specifically, to overcome the challenge of semantic relevance, we introduce a Mixture-of-Experts-Knowledge-Aware (MoEKA) Encoder, designed to integrate the semantics of entities, relations, and numerical attributes into a joint semantic space. To tackle semantic ambiguity, we implement a new ordinal knowledge contrastive learning (OKCL) strategy that generates high-quality ordinal samples from the original data with the aid of ordinal relations, capturing fine-grained semantic nuances essential for accurate numerical reasoning. Experiments on three public benchmark datasets demonstrate the superior performance of KAAE across various attribute value distributions.
CSGNN: Conquering Noisy Node labels via Dynamic Class-wise Selection
Nov 20, 2023



Graph Neural Networks (GNNs) have emerged as a powerful tool for representation learning on graphs, but they often suffer from overfitting and label noise issues, especially when the data is scarce or imbalanced. Different from the paradigm of previous methods that rely on single-node confidence, in this paper, we introduce a novel Class-wise Selection for Graph Neural Networks, dubbed CSGNN, which employs a neighbor-aggregated latent space to adaptively select reliable nodes across different classes. Specifically, 1) to tackle the class imbalance issue, we introduce a dynamic class-wise selection mechanism, leveraging the clustering technique to identify clean nodes based on the neighbor-aggregated confidences. In this way, our approach can avoid the pitfalls of biased sampling which is common with global threshold techniques. 2) To alleviate the problem of noisy labels, built on the concept of the memorization effect, CSGNN prioritizes learning from clean nodes before noisy ones, thereby iteratively enhancing model performance while mitigating label noise. Through extensive experiments, we demonstrate that CSGNN outperforms state-of-the-art methods in terms of both effectiveness and robustness.
Geometry Interaction Knowledge Graph Embeddings
Jun 24, 2022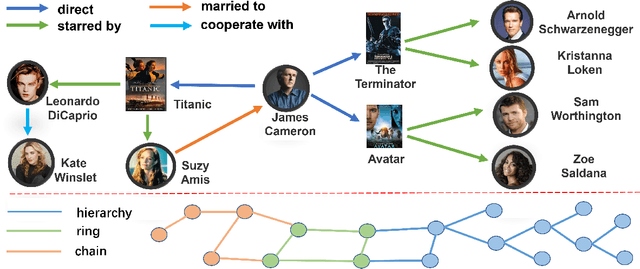


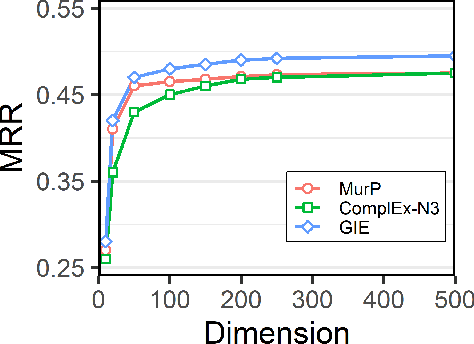
Knowledge graph (KG) embeddings have shown great power in learning representations of entities and relations for link prediction tasks. Previous work usually embeds KGs into a single geometric space such as Euclidean space (zero curved), hyperbolic space (negatively curved) or hyperspherical space (positively curved) to maintain their specific geometric structures (e.g., chain, hierarchy and ring structures). However, the topological structure of KGs appears to be complicated, since it may contain multiple types of geometric structures simultaneously. Therefore, embedding KGs in a single space, no matter the Euclidean space, hyperbolic space or hyperspheric space, cannot capture the complex structures of KGs accurately. To overcome this challenge, we propose Geometry Interaction knowledge graph Embeddings (GIE), which learns spatial structures interactively between the Euclidean, hyperbolic and hyperspherical spaces. Theoretically, our proposed GIE can capture a richer set of relational information, model key inference patterns, and enable expressive semantic matching across entities. Experimental results on three well-established knowledge graph completion benchmarks show that our GIE achieves the state-of-the-art performance with fewer parameters.
ER: Equivariance Regularizer for Knowledge Graph Completion
Jun 24, 2022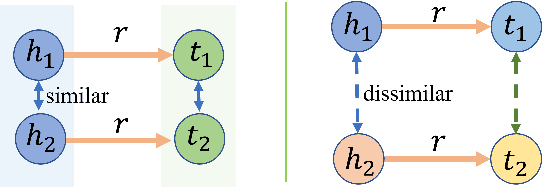
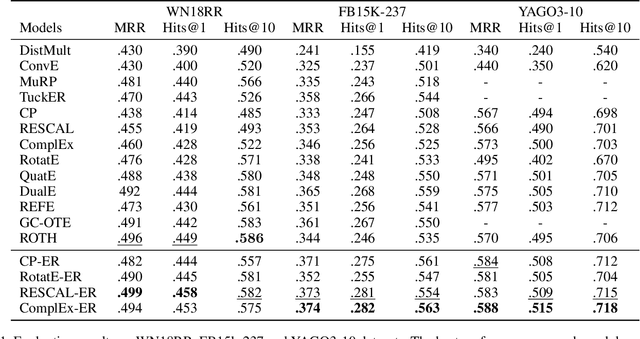


Tensor factorization and distanced based models play important roles in knowledge graph completion (KGC). However, the relational matrices in KGC methods often induce a high model complexity, bearing a high risk of overfitting. As a remedy, researchers propose a variety of different regularizers such as the tensor nuclear norm regularizer. Our motivation is based on the observation that the previous work only focuses on the "size" of the parametric space, while leaving the implicit semantic information widely untouched. To address this issue, we propose a new regularizer, namely, Equivariance Regularizer (ER), which can suppress overfitting by leveraging the implicit semantic information. Specifically, ER can enhance the generalization ability of the model by employing the semantic equivariance between the head and tail entities. Moreover, it is a generic solution for both distance based models and tensor factorization based models. The experimental results indicate a clear and substantial improvement over the state-of-the-art relation prediction methods.