 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRipple: Accelerating LLM Inference on Smartphones with Correlation-Aware Neuron Management
Oct 29, 2024



Large Language Models (LLMs) have achieved remarkable success across various domains, yet deploying them on mobile devices remains an arduous challenge due to their extensive computational and memory demands. While lightweight LLMs have been developed to fit mobile environments, they suffer from degraded model accuracy. In contrast, sparsity-based techniques minimize DRAM usage by selectively transferring only relevant neurons to DRAM while retaining the full model in external storage, such as flash. However, such approaches are critically limited by numerous I/O operations, particularly on smartphones with severe IOPS constraints. In this paper, we propose Ripple, a novel approach that accelerates LLM inference on smartphones by optimizing neuron placement in flash memory. Ripple leverages the concept of Neuron Co-Activation, where neurons frequently activated together are linked to facilitate continuous read access and optimize data transfer efficiency. Our approach incorporates a two-stage solution: an offline stage that reorganizes neuron placement based on co-activation patterns, and an online stage that employs tailored data access and caching strategies to align well with hardware characteristics. Evaluations conducted on a variety of smartphones and LLMs demonstrate that Ripple achieves up to 5.93x improvements in I/O latency compared to the state-of-the-art. As the first solution to optimize storage placement under sparsity, Ripple explores a new optimization space at the intersection of sparsity-driven algorithm and storage-level system co-design in LLM inference.
Design, Modeling and Dynamic Compensation PID Control of a Fully-Actuated Aerial Manipulation System
Sep 23, 2017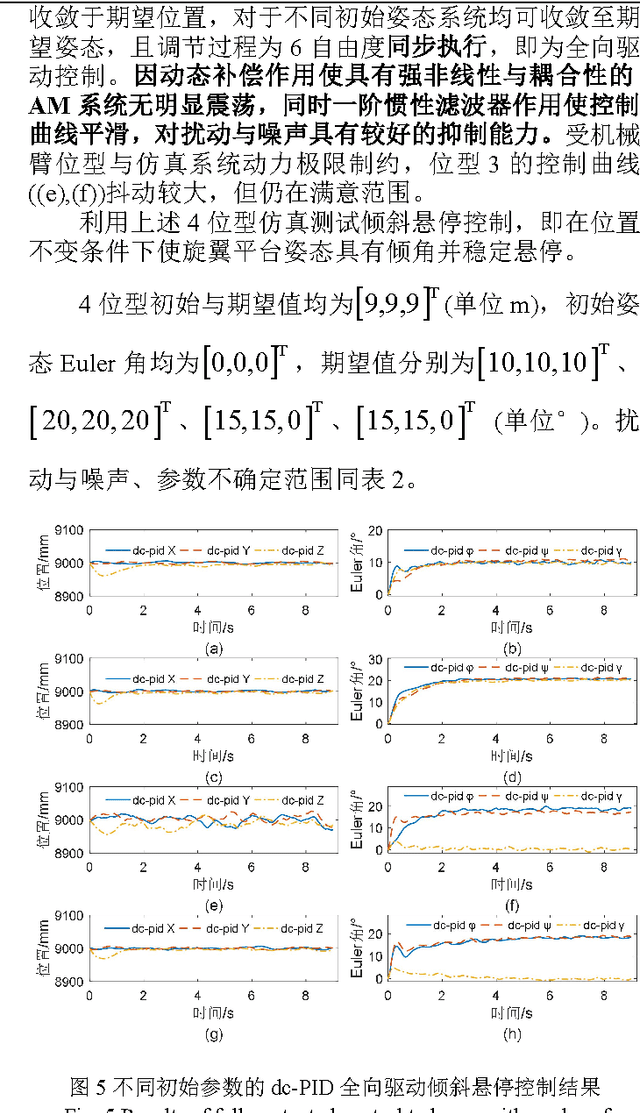
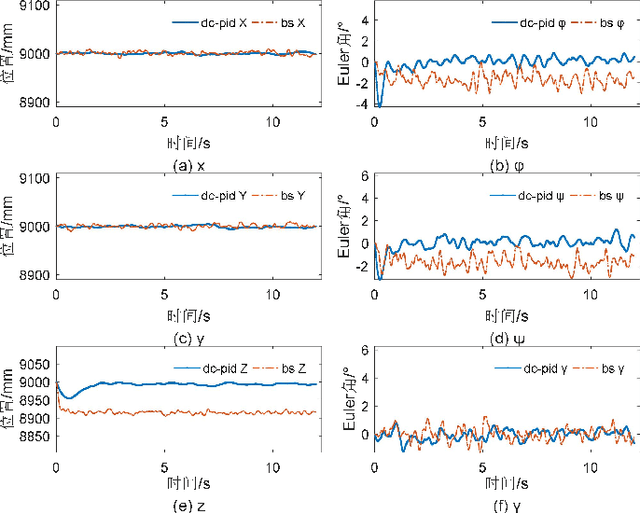
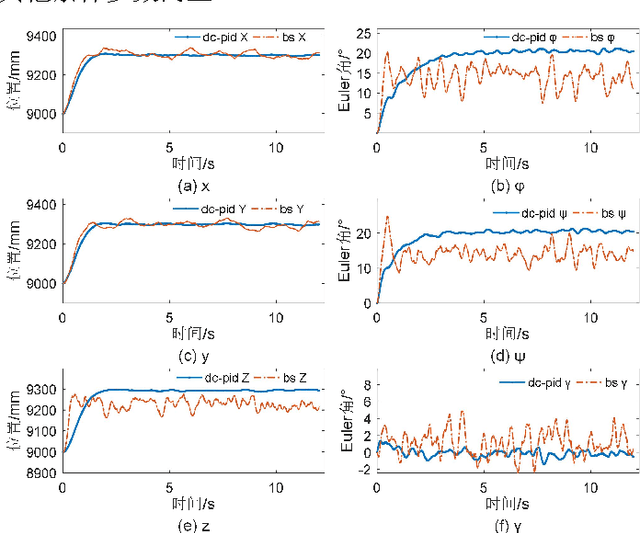
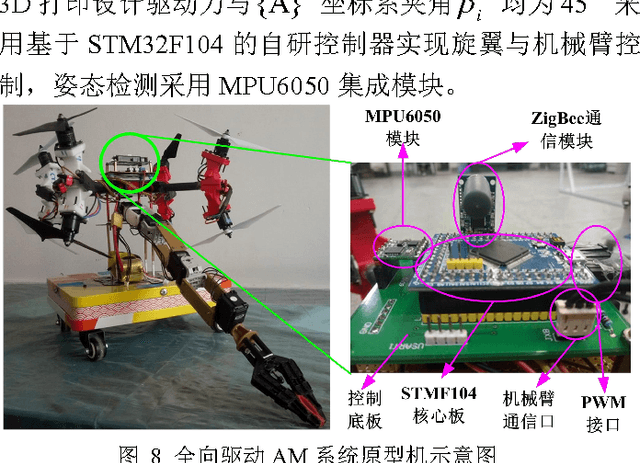
This paper addresses design, modeling and dynamic-compensation PID (dc-PID) control of a novel type of fully-actuated aerial manipulation (AM) system. Firstly, design of novel mechanical structure of the AM is presented. Secondly, kinematics and dynamics of AM are modeled using Craig parameters and recursion Newton-Euler equations respectively, which give rise to a more accurate dynamic relationship between aerial platform and manipulator. Then, the dynamic-compensation PID control is proposed to solve the problem of fully-actuated control of AM. Finally, uniform coupled matrix equations between driving forces/moments and rotor speeds are derived, which can support design and analysis of parameters and decoupling theoretically. It is taken into account practical problems including noise and perturbation, parameter uncertainty, and power limitation in simulations, and results from simulations shows that the AM system presented can be fully-actued controlled with advanced control performances, which can not achieved theoretically in traditional AM. And with compared to backstepping control dc-PID has better control accuracy and capability to disturbance rejection in two simulations of aerial operation tasks with motion of joint. The experiment of dc-pid proves the availability and effectiveness of the method proposed.