 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling and Dynamic Compensation PID Control of a Fully-Actuated Aerial Manipulation System
Paper and Code
Sep 23, 2017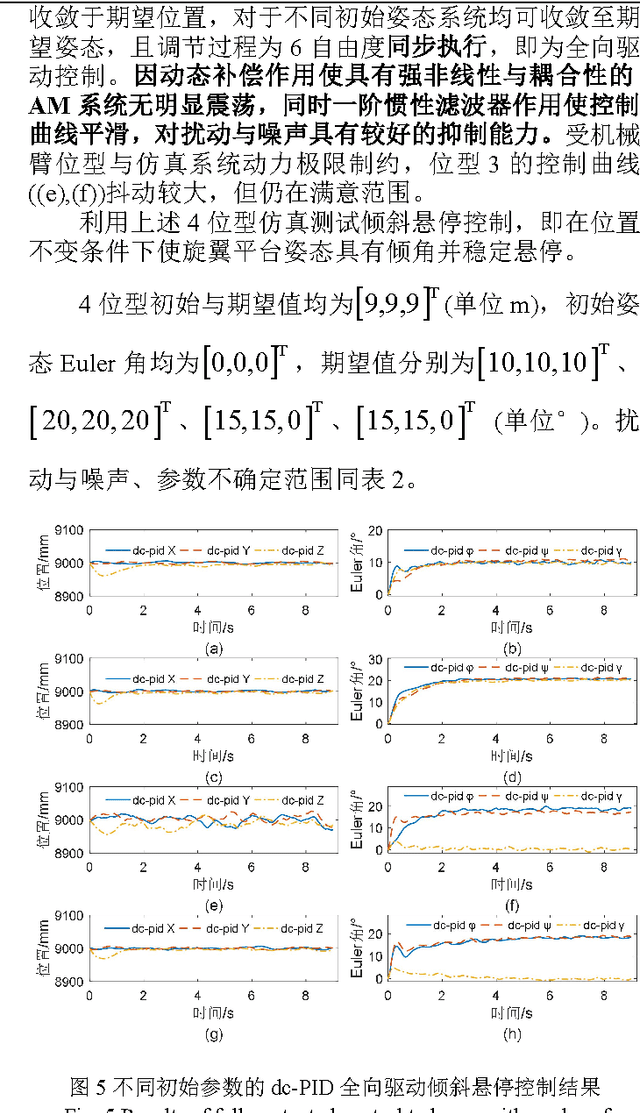
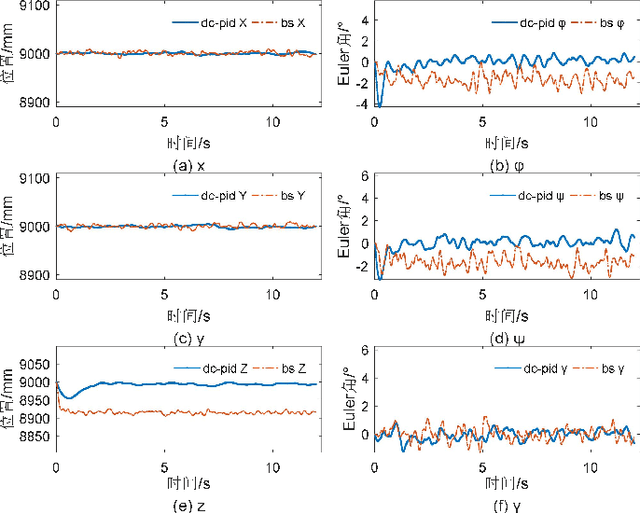
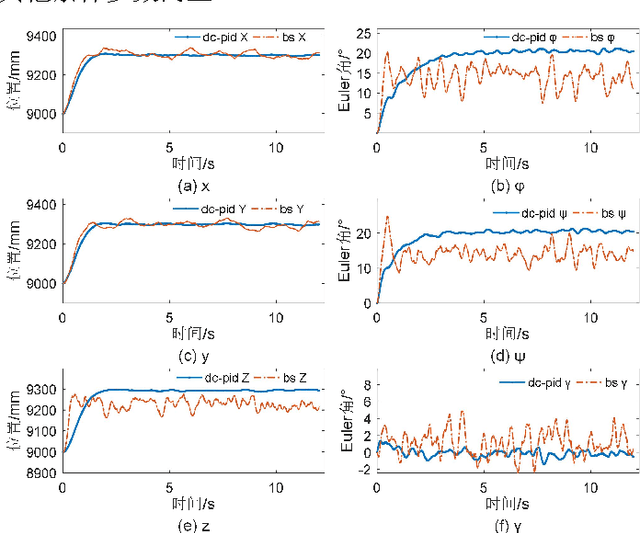
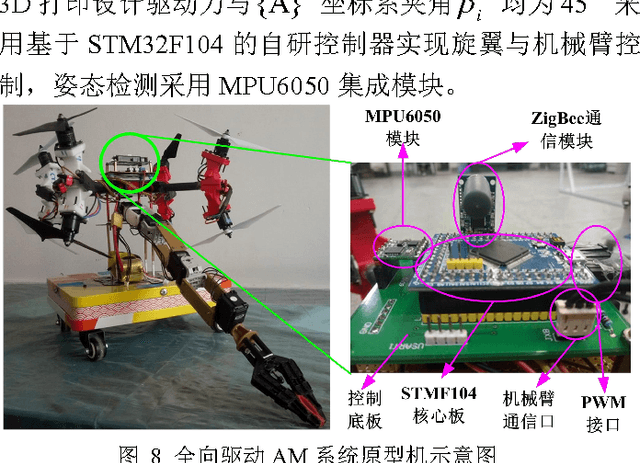
This paper addresses design, modeling and dynamic-compensation PID (dc-PID) control of a novel type of fully-actuated aerial manipulation (AM) system. Firstly, design of novel mechanical structure of the AM is presented. Secondly, kinematics and dynamics of AM are modeled using Craig parameters and recursion Newton-Euler equations respectively, which give rise to a more accurate dynamic relationship between aerial platform and manipulator. Then, the dynamic-compensation PID control is proposed to solve the problem of fully-actuated control of AM. Finally, uniform coupled matrix equations between driving forces/moments and rotor speeds are derived, which can support design and analysis of parameters and decoupling theoretically. It is taken into account practical problems including noise and perturbation, parameter uncertainty, and power limitation in simulations, and results from simulations shows that the AM system presented can be fully-actued controlled with advanced control performances, which can not achieved theoretically in traditional AM. And with compared to backstepping control dc-PID has better control accuracy and capability to disturbance rejection in two simulations of aerial operation tasks with motion of joint. The experiment of dc-pid proves the availability and effectiveness of the method proposed.