 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Shared Control for Surgical Robot Based on Context-Aware Sim-to-Real Adaptation
Apr 23, 2022



Human-robot shared control, which integrates the advantages of both humans and robots, is an effective approach to facilitate efficient surgical operation. Learning from demonstration (LfD) techniques can be used to automate some of the surgical subtasks for the construction of the shared control mechanism. However, a sufficient amount of data is required for the robot to learn the manoeuvres. Using a surgical simulator to collect data is a less resource-demanding approach. With sim-to-real adaptation, the manoeuvres learned from a simulator can be transferred to a physical robot. To this end, we propose a sim-to-real adaptation method to construct a human-robot shared control framework for robotic surgery. In this paper, a desired trajectory is generated from a simulator using LfD method, while dynamic motion primitives (DMP) is used to transfer the desired trajectory from the simulator to the physical robotic platform. Moreover, a role adaptation mechanism is developed such that the robot can adjust its role according to the surgical operation contexts predicted by a neural network model. The effectiveness of the proposed framework is validated on the da Vinci Research Kit (dVRK). Results of the user studies indicated that with the adaptive human-robot shared control framework, the path length of the remote controller, the total clutching number and the task completion time can be reduced significantly. The proposed method outperformed the traditional manual control via teleoperation.
Gaussian Kernel Mixture Network for Single Image Defocus Deblurring
Oct 31, 2021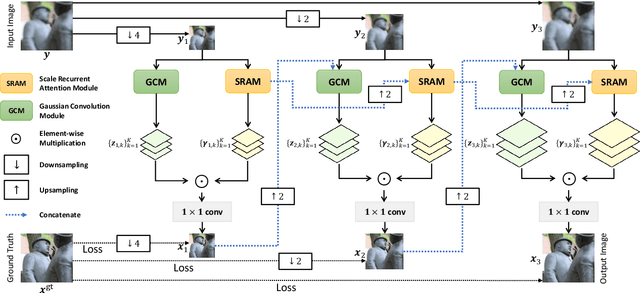
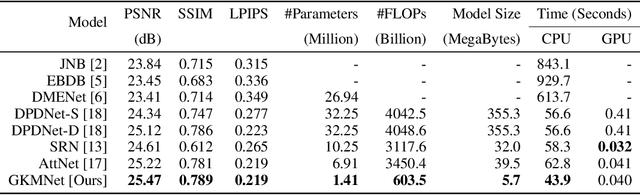
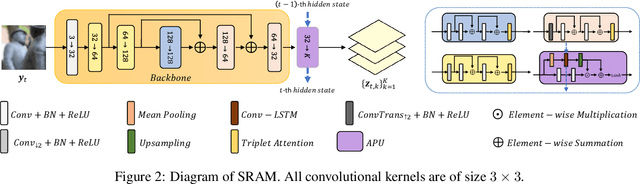
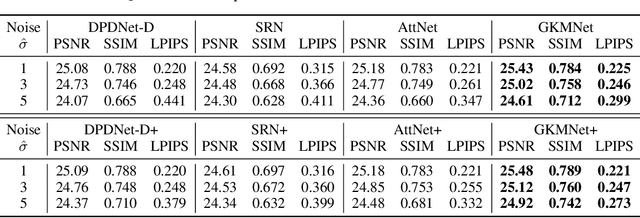
Defocus blur is one kind of blur effects often seen in images, which is challenging to remove due to its spatially variant amount. This paper presents an end-to-end deep learning approach for removing defocus blur from a single image, so as to have an all-in-focus image for consequent vision tasks. First, a pixel-wise Gaussian kernel mixture (GKM) model is proposed for representing spatially variant defocus blur kernels in an efficient linear parametric form, with higher accuracy than existing models. Then, a deep neural network called GKMNet is developed by unrolling a fixed-point iteration of the GKM-based deblurring. The GKMNet is built on a lightweight scale-recurrent architecture, with a scale-recurrent attention module for estimating the mixing coefficients in GKM for defocus deblurring. Extensive experiments show that the GKMNet not only noticeably outperforms existing defocus deblurring methods, but also has its advantages in terms of model complexity and computational efficiency.
Robotic Electrospinning Actuated by Non-Circular Joint Continuum Manipulator for Endoluminal Therapy
Jun 07, 2021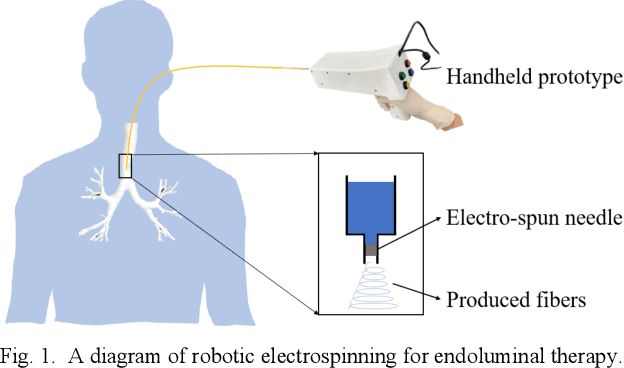

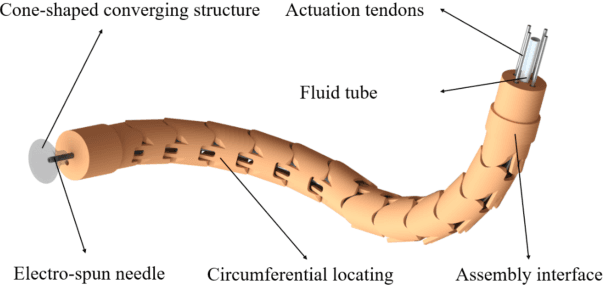
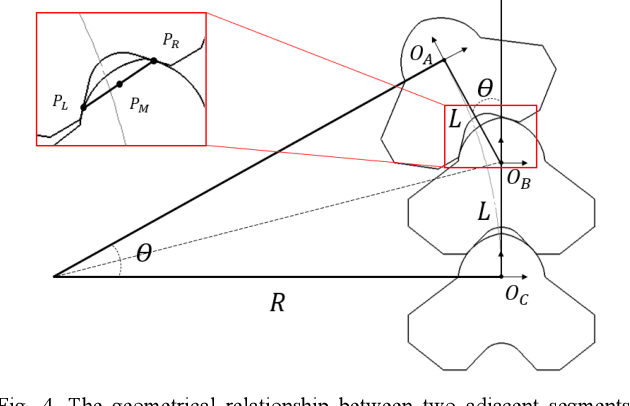
Electrospinning has exhibited excellent benefits to treat the trauma for tissue engineering due to its produced micro/nano fibrous structure. It can effectively adhere to the tissue surface for long-term continuous therapy. This paper develops a robotic electrospinning platform for endoluminal therapy. The platform consists of a continuum manipulator, the electrospinning device, and the actuation unit. The continuum manipulator has two bending sections to facilitate the steering of the tip needle for a controllable spinning direction. Non-circular joint profile is carefully designed to enable a constant length of the centreline of a continuum manipulator for stable fluid transmission inside it. Experiments are performed on a bronchus phantom, and the steering ability and bending limitation in each direction are also investigated. The endoluminal electrospinning is also fulfilled by a trajectory following and points targeting experiments. The effective adhesive area of the produced fibre is also illustrated. The proposed robotic electrospinning shows its feasibility to precisely spread more therapeutic drug to construct fibrous structure for potential endoluminal treatment.
FBG-Based Triaxial Force Sensor Integrated with an Eccentrically Configured Imaging Probe for Endoluminal Optical Biopsy
Jun 11, 2020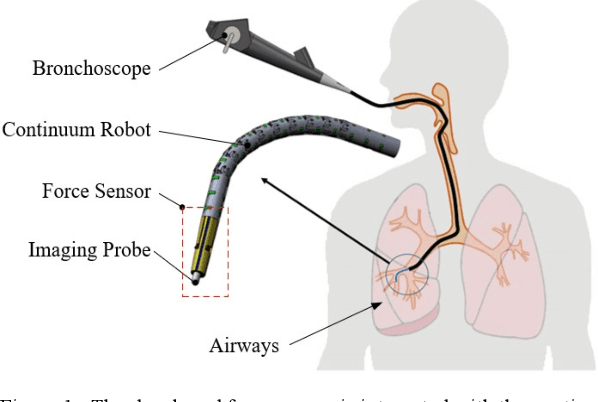
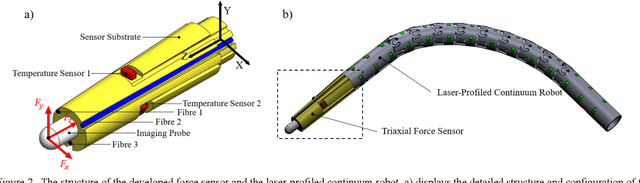
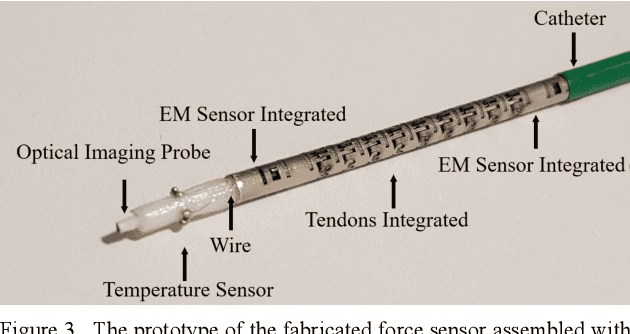
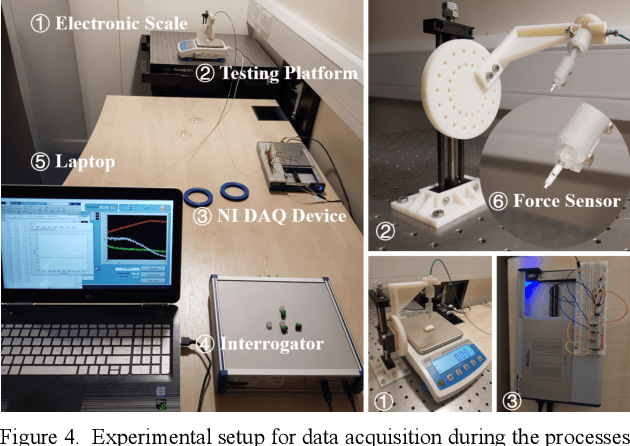
Accurate force sensing is important for endoluminal intervention in terms of both safety and lesion targeting. This paper develops an FBG-based force sensor for robotic bronchoscopy by configuring three FBG sensors at the lateral side of a conical substrate. It allows a large and eccentric inner lumen for the interventional instrument, enabling a flexible imaging probe inside to perform optical biopsy. The force sensor is embodied with a laser-profiled continuum robot and thermo drift is fully compensated by three temperature sensors integrated on the circumference surface of the sensor substrate. Different decoupling approaches are investigated, and nonlinear decoupling is adopted based on the cross-validation SVM and a Gaussian kernel function, achieving an accuracy of 10.58 mN, 14.57 mN and 26.32 mN along X, Y and Z axis, respectively. The tissue test is also investigated to further demonstrate the feasibility of the developed triaxial force sensor