 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Electrospinning Actuated by Non-Circular Joint Continuum Manipulator for Endoluminal Therapy
Jun 07, 2021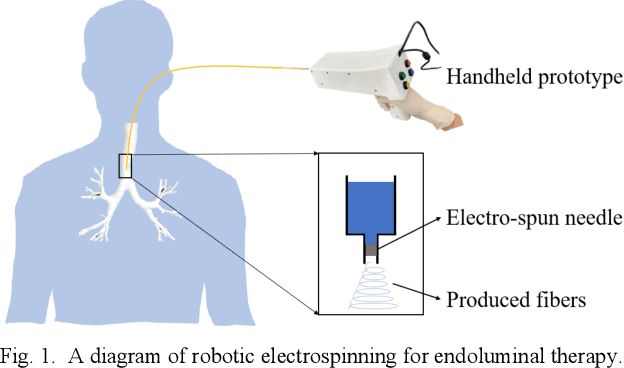

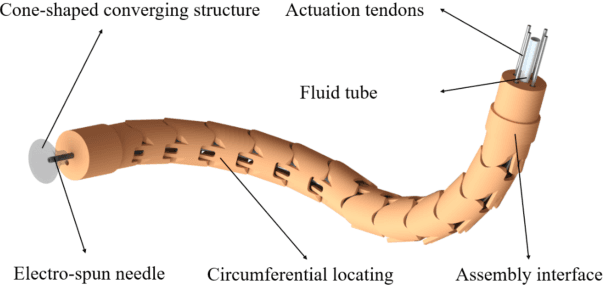
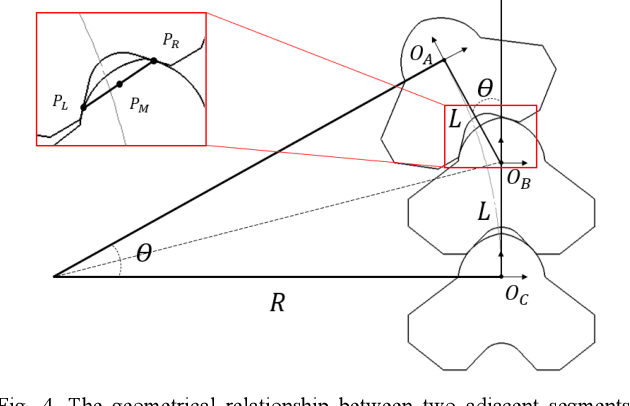
Electrospinning has exhibited excellent benefits to treat the trauma for tissue engineering due to its produced micro/nano fibrous structure. It can effectively adhere to the tissue surface for long-term continuous therapy. This paper develops a robotic electrospinning platform for endoluminal therapy. The platform consists of a continuum manipulator, the electrospinning device, and the actuation unit. The continuum manipulator has two bending sections to facilitate the steering of the tip needle for a controllable spinning direction. Non-circular joint profile is carefully designed to enable a constant length of the centreline of a continuum manipulator for stable fluid transmission inside it. Experiments are performed on a bronchus phantom, and the steering ability and bending limitation in each direction are also investigated. The endoluminal electrospinning is also fulfilled by a trajectory following and points targeting experiments. The effective adhesive area of the produced fibre is also illustrated. The proposed robotic electrospinning shows its feasibility to precisely spread more therapeutic drug to construct fibrous structure for potential endoluminal treatment.
FBG-Based Triaxial Force Sensor Integrated with an Eccentrically Configured Imaging Probe for Endoluminal Optical Biopsy
Jun 11, 2020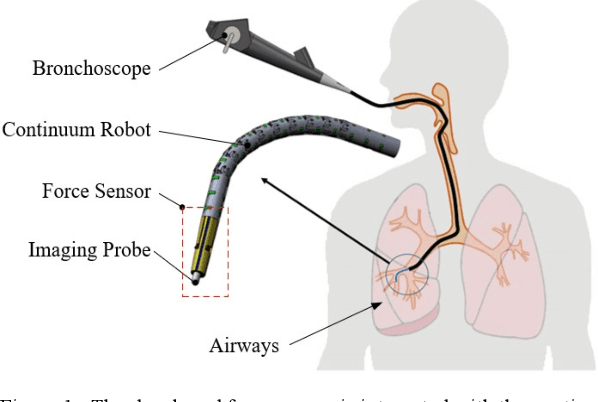
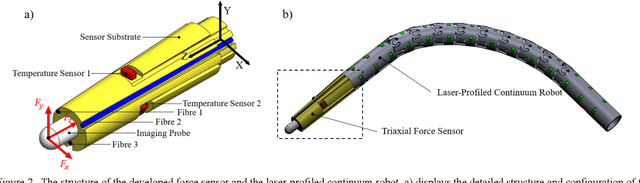
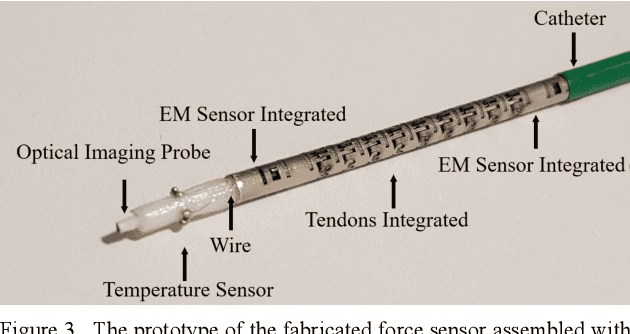
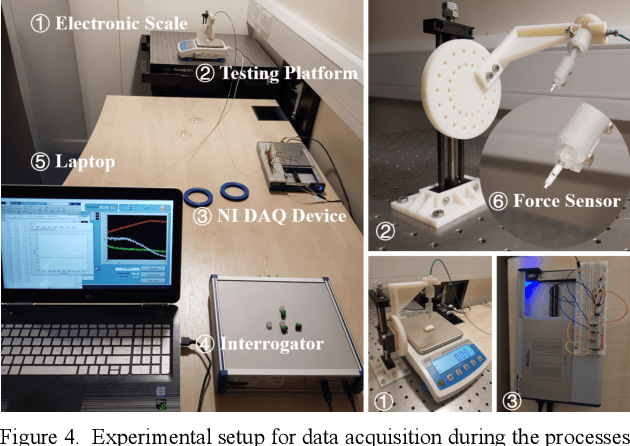
Accurate force sensing is important for endoluminal intervention in terms of both safety and lesion targeting. This paper develops an FBG-based force sensor for robotic bronchoscopy by configuring three FBG sensors at the lateral side of a conical substrate. It allows a large and eccentric inner lumen for the interventional instrument, enabling a flexible imaging probe inside to perform optical biopsy. The force sensor is embodied with a laser-profiled continuum robot and thermo drift is fully compensated by three temperature sensors integrated on the circumference surface of the sensor substrate. Different decoupling approaches are investigated, and nonlinear decoupling is adopted based on the cross-validation SVM and a Gaussian kernel function, achieving an accuracy of 10.58 mN, 14.57 mN and 26.32 mN along X, Y and Z axis, respectively. The tissue test is also investigated to further demonstrate the feasibility of the developed triaxial force sensor