 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Planning and Diffusion for Mobility with Unknown Dynamics
Oct 09, 2024



Manipulation of large objects over long horizons (such as carts in a warehouse) is an essential skill for deployable robotic systems. Large objects require mobile manipulation which involves simultaneous manipulation, navigation, and movement with the object in tow. In many real-world situations, object dynamics are incredibly complex, such as the interaction of an office chair (with a rotating base and five caster wheels) and the ground. We present a hierarchical algorithm for long-horizon robot manipulation problems in which the dynamics are partially unknown. We observe that diffusion-based behavior cloning is highly effective for short-horizon problems with unknown dynamics, so we decompose the problem into an abstract high-level, obstacle-aware motion-planning problem that produces a waypoint sequence. We use a short-horizon, relative-motion diffusion policy to achieve the waypoints in sequence. We train mobile manipulation policies on a Spot robot that has to push and pull an office chair. Our hierarchical manipulation policy performs consistently better, especially when the horizon increases, compared to a diffusion policy trained on long-horizon demonstrations or motion planning assuming a rigidly-attached object (success rate of 8 (versus 0 and 5 respectively) out of 10 runs). Importantly, our learned policy generalizes to new layouts, grasps, chairs, and flooring that induces more friction, without any further training, showing promise for other complex mobile manipulation problems. Project Page: https://yravan.github.io/plannerorderedpolicy/
Guiding Long-Horizon Task and Motion Planning with Vision Language Models
Oct 03, 2024



Vision-Language Models (VLM) can generate plausible high-level plans when prompted with a goal, the context, an image of the scene, and any planning constraints. However, there is no guarantee that the predicted actions are geometrically and kinematically feasible for a particular robot embodiment. As a result, many prerequisite steps such as opening drawers to access objects are often omitted in their plans. Robot task and motion planners can generate motion trajectories that respect the geometric feasibility of actions and insert physically necessary actions, but do not scale to everyday problems that require common-sense knowledge and involve large state spaces comprised of many variables. We propose VLM-TAMP, a hierarchical planning algorithm that leverages a VLM to generate goth semantically-meaningful and horizon-reducing intermediate subgoals that guide a task and motion planner. When a subgoal or action cannot be refined, the VLM is queried again for replanning. We evaluate VLM- TAMP on kitchen tasks where a robot must accomplish cooking goals that require performing 30-50 actions in sequence and interacting with up to 21 objects. VLM-TAMP substantially outperforms baselines that rigidly and independently execute VLM-generated action sequences, both in terms of success rates (50 to 100% versus 0%) and average task completion percentage (72 to 100% versus 15 to 45%). See project site https://zt-yang.github.io/vlm-tamp-robot/ for more information.
Compositional Diffusion-Based Continuous Constraint Solvers
Sep 02, 2023This paper introduces an approach for learning to solve continuous constraint satisfaction problems (CCSP) in robotic reasoning and planning. Previous methods primarily rely on hand-engineering or learning generators for specific constraint types and then rejecting the value assignments when other constraints are violated. By contrast, our model, the compositional diffusion continuous constraint solver (Diffusion-CCSP) derives global solutions to CCSPs by representing them as factor graphs and combining the energies of diffusion models trained to sample for individual constraint types. Diffusion-CCSP exhibits strong generalization to novel combinations of known constraints, and it can be integrated into a task and motion planner to devise long-horizon plans that include actions with both discrete and continuous parameters. Project site: https://diffusion-ccsp.github.io/
Sequence-Based Plan Feasibility Prediction for Efficient Task and Motion Planning
Nov 03, 2022Robots planning long-horizon behavior in complex environments must be able to quickly reason about the impact of the environment's geometry on what plans are feasible, i.e., whether there exist action parameter values that satisfy all constraints on a candidate plan. In tasks involving articulated and movable obstacles, typical Task and Motion Planning (TAMP) algorithms spend most of their runtime attempting to solve unsolvable constraint satisfaction problems imposed by infeasible plan skeletons. We developed a novel Transformer-based architecture, PIGINet, that predicts plan feasibility based on the initial state, goal, and candidate plans, fusing image and text embeddings with state features. The model sorts the plan skeletons produced by a TAMP planner according to the predicted satisfiability likelihoods. We evaluate the runtime of our learning-enabled TAMP algorithm on several distributions of kitchen rearrangement problems, comparing its performance to that of non-learning baselines and algorithm ablations. Our experiments show that PIGINet substantially improves planning efficiency, cutting down runtime by 80% on average on pick-and-place problems with articulated obstacles. It also achieves zero-shot generalization to problems with unseen object categories thanks to its visual encoding of objects.
Let's Handle It: Generalizable Manipulation of Articulated Objects
Feb 23, 2022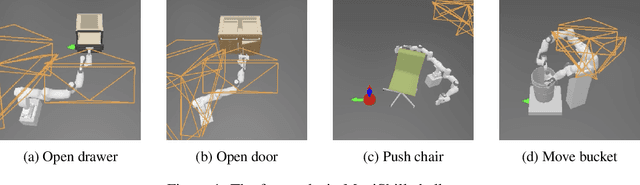


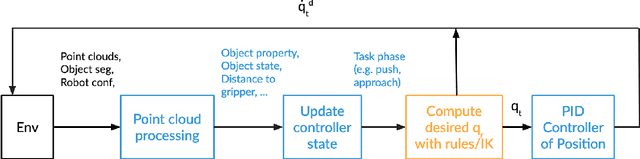
In this project we present a framework for building generalizable manipulation controller policies that map from raw input point clouds and segmentation masks to joint velocities. We took a traditional robotics approach, using point cloud processing, end-effector trajectory calculation, inverse kinematics, closed-loop position controllers, and behavior trees. We demonstrate our framework on four manipulation skills on common household objects that comprise the SAPIEN ManiSkill Manipulation challenge.