 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinite Time Lyapunov Exponent Analysis of Model Predictive Control and Reinforcement Learning
Apr 14, 2023

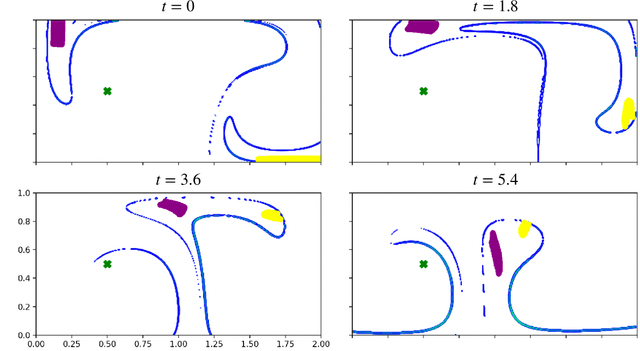
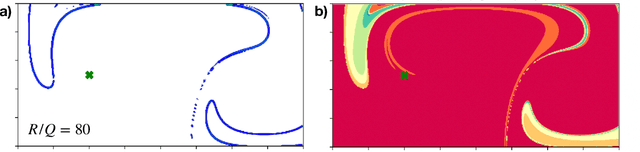
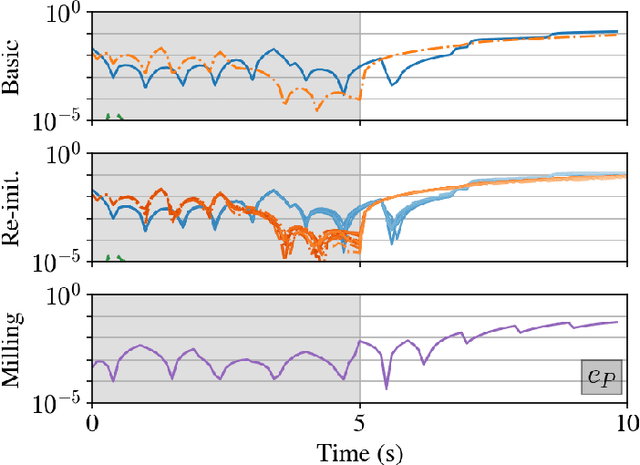
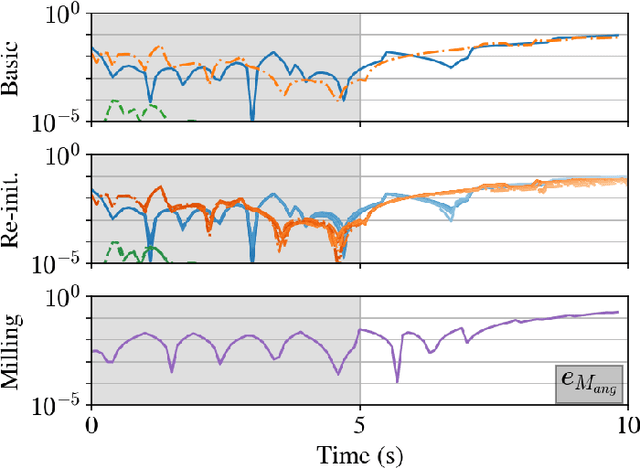
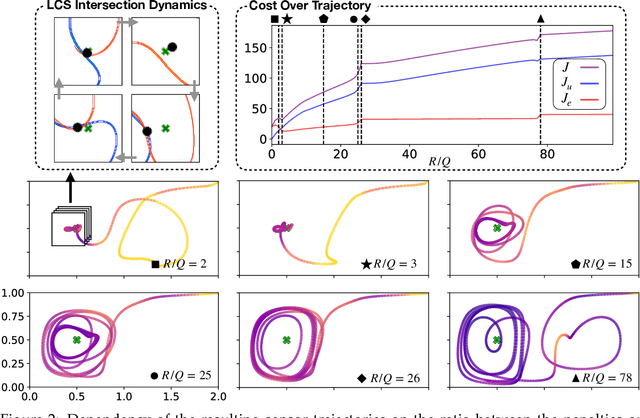
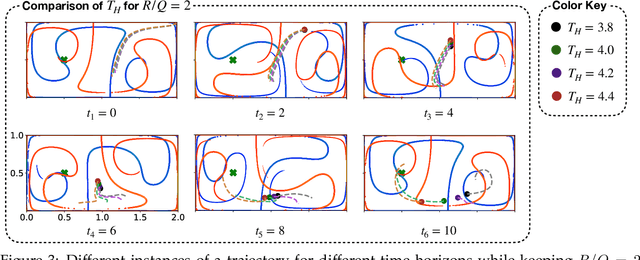
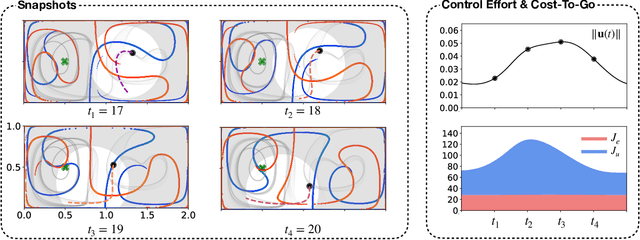
Finite-time Lyapunov exponents (FTLEs) provide a powerful approach to compute time-varying analogs of invariant manifolds in unsteady fluid flow fields. These manifolds are useful to visualize the transport mechanisms of passive tracers advecting with the flow. However, many vehicles and mobile sensors are not passive, but are instead actuated according to some intelligent trajectory planning or control law; for example, model predictive control and reinforcement learning are often used to design energy-efficient trajectories in a dynamically changing background flow. In this work, we investigate the use of FTLE on such controlled agents to gain insight into optimal transport routes for navigation in known unsteady flows. We find that these controlled FTLE (cFTLE) coherent structures separate the flow field into different regions with similar costs of transport to the goal location. These separatrices are functions of the planning algorithm's hyper-parameters, such as the optimization time horizon and the cost of actuation. Computing the invariant sets and manifolds of active agent dynamics in dynamic flow fields is useful in the context of robust motion control, hyperparameter tuning, and determining safe and collision-free trajectories for autonomous systems. Moreover, these cFTLE structures provide insight into effective deployment locations for mobile agents with actuation and energy constraints to traverse the ocean or atmosphere.
Swarm Modelling with Dynamic Mode Decomposition
Apr 08, 2022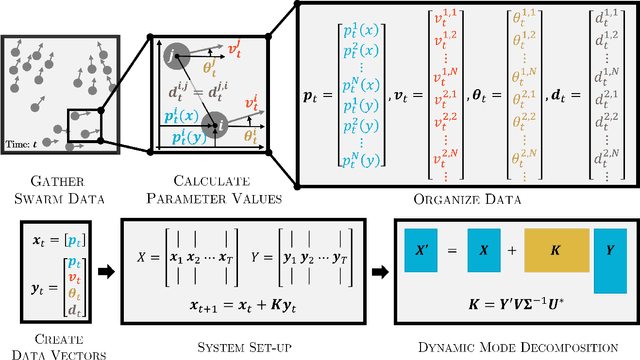
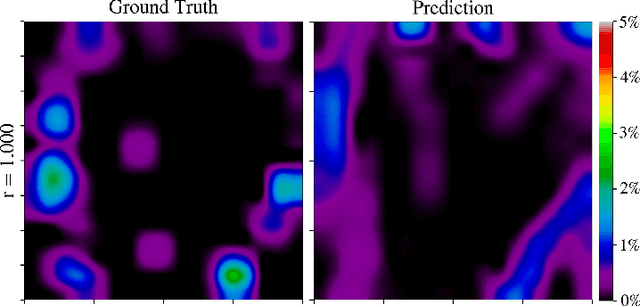
Modelling biological or engineering swarms is challenging due to the inherently high dimension of the system, despite the often low-dimensional emergent dynamics. Most existing swarm modelling approaches are based on first principles and often result in swarm-specific parameterizations that do not generalize to a broad range of applications. In this work, we apply a purely data-driven method to (1) learn local interactions of homogeneous swarms through observation data and to (2) generate similar swarming behaviour using the learned model. In particular, a modified version of dynamic mode decomposition with control, called swarmDMD, is developed and tested on the canonical Vicsek swarm model. The goal is to use swarmDMD to learn inter-agent interactions that give rise to the observed swarm behaviour. We show that swarmDMD can faithfully reconstruct the swarm dynamics, and the model learned by swarmDMD provides a short prediction window for data extrapolation with a trade-off between prediction accuracy and prediction horizon. We also provide a comprehensive analysis on the efficacy of different observation data types on the modelling, where we find that inter-agent distance yields the most accurate models. We believe the proposed swarmDMD approach will be useful for studying multi-agent systems found in biology, physics, and engineering.
A Multi-size Kernel based Adaptive Convolutional Neural Network for Bearing Fault Diagnosis
Mar 29, 2022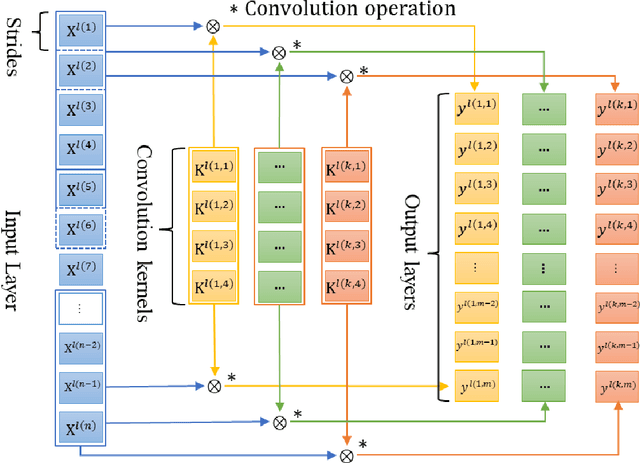
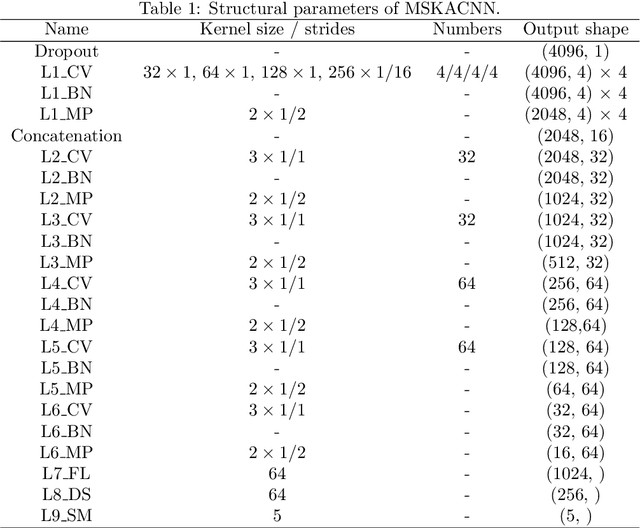
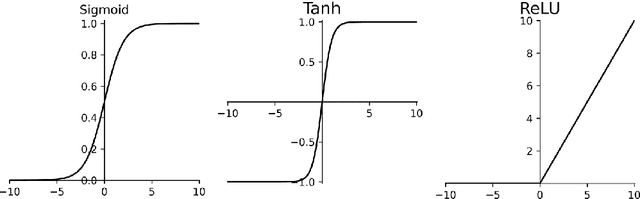
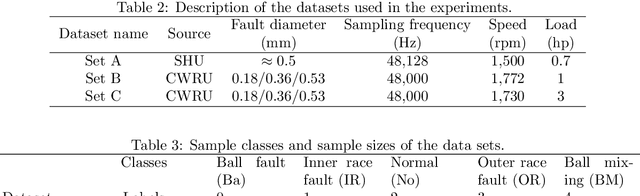
Bearing fault identification and analysis is an important research area in the field of machinery fault diagnosis. Aiming at the common faults of rolling bearings, we propose a data-driven diagnostic algorithm based on the characteristics of bearing vibrations called multi-size kernel based adaptive convolutional neural network (MSKACNN). Using raw bearing vibration signals as the inputs, MSKACNN provides vibration feature learning and signal classification capabilities to identify and analyze bearing faults. Ball mixing is a ball bearing production quality problem that is difficult to identify using traditional frequency domain analysis methods since it requires high frequency resolutions of the measurement signals and results in a long analyzing time. The proposed MSKACNN is shown to improve the efficiency and accuracy of ball mixing diagnosis. To further demonstrate the effectiveness of MSKACNN in bearing fault identification, a bearing vibration data acquisition system was developed, and vibration signal acquisition was performed on rolling bearings under five different fault conditions including ball mixing. The resulting datasets were used to analyze the performance of our proposed model. To validate the adaptive ability of MSKACNN, fault test data from the Case Western Reserve University Bearing Data Center were also used. Test results show that MSKACNN can identify the different bearing conditions with high accuracy with high generalization ability. We presented an implementation of the MSKACNN as a lightweight module for a real-time bearing fault diagnosis system that is suitable for production.
Resilient Time-Varying Formation Tracking for Mobile Robot Networks under Deception Attacks on Positioning
Oct 20, 2021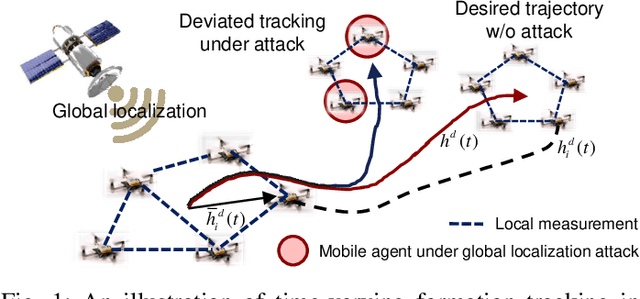
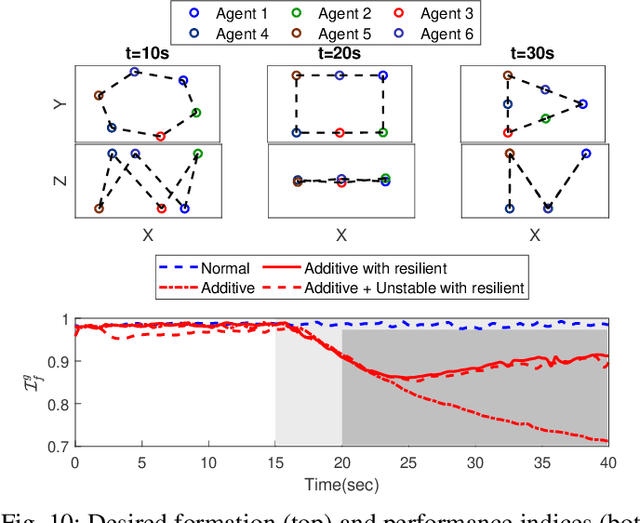

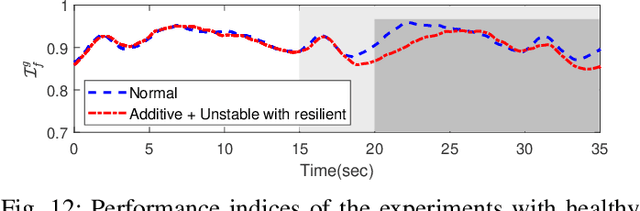
This paper investigates the resilient control, analysis, recovery, and operation of mobile robot networks in time-varying formation tracking under deception attacks on global positioning. Local and global tracking control algorithms are presented to ensure redundancy of the mobile robot network and to retain the desired functionality for better resilience. Lyapunov stability analysis is utilized to show the boundedness of the formation tracking error and the stability of the network under various attack modes. A performance index is designed to compare the efficiency of the proposed formation tracking algorithms in situations with or without positioning attacks. Subsequently, a communication-free decentralized cooperative localization approach based on extended information filters is presented for positioning estimate recovery where the identification of the positioning attacks is based on Kullback-Leibler divergence. A gain-tuning resilient operation is proposed to strategically synthesize the formation control and cooperative localization for accurate and rapid system recovery from positioning attacks. The proposed methods are tested using both numerical simulation and experimental validation with a team of quadrotors.
UAV Path Planning for Optimal Coverage of Areas with Nonuniform Importance
Oct 19, 2021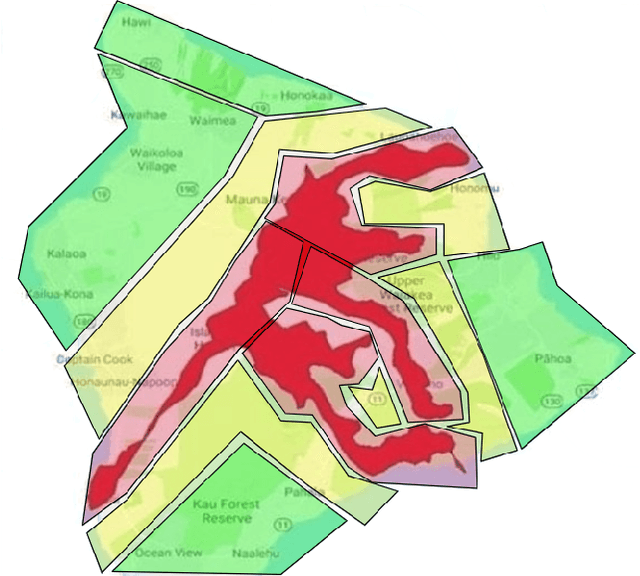
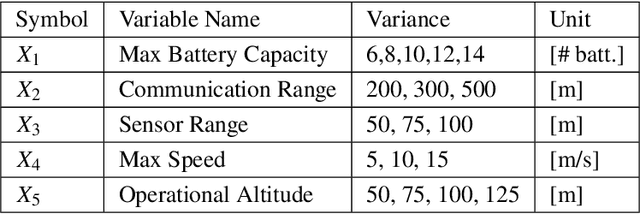
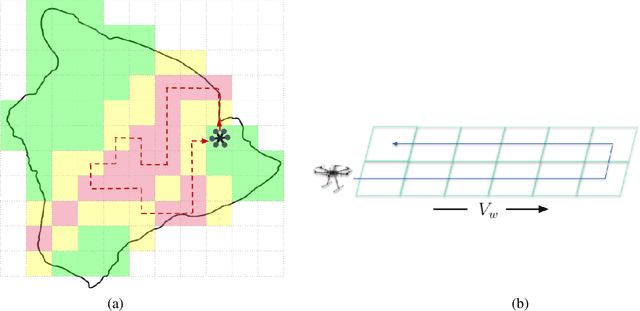
Coverage of an inaccessible or difficult terrain with potential health and safety hazards, such as in a volcanic region, is difficult yet crucial from scientific and meteorological perspectives. Areas contained within this region can provide us with different types of valuable information of varying importance. We present an algorithm to optimally cover a volcanic region in Hawai`i with an unmanned aerial vehicle (UAV). The target region is assigned with a nonuniform coverage importance score distribution. For a specified battery capacity of the UAV, the optimization problem seeks the path that maximizes the total coverage area and the accumulated importance score while penalizing the revisiting of the same area. Trajectories are generated offline for the UAV based on the available power and coverage information map. The optimal trajectory minimizes the unspent battery power while enforcing that the UAV returns to its starting location. This multi-objective optimization problem is solved by using sequential quadratic programming. The details of the competitive optimization problem are discussed along with the analysis and simulation results to demonstrate the applicability of the proposed algorithm.
Dynamic Compressed Sensing of Unsteady Flows with a Mobile Robot
Oct 16, 2021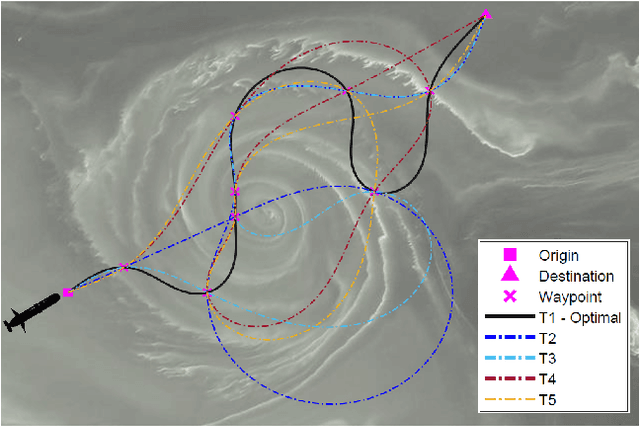
Large-scale environmental sensing with a finite number of mobile sensor is a challenging task that requires a lot of resources and time. This is especially true when features in the environment are spatiotemporally changing with unknown or partially known dynamics. However, these dynamic features often evolve in a low-dimensional space, making it possible to capture their dynamics sufficiently well with only one or several properly planned mobile sensors. This paper investigates the problem of dynamic compressed sensing (DCS) of an unsteady flow field, which takes advantage of the inherently low dimensionality of the underlying flow dynamics to reduce number of waypoints for a mobile sensing robot. The optimal sensing waypoints are identified by an iterative compressed sensing algorithm that optimizes the flow reconstruction based on the proper orthogonal decomposition (POD) modes. An optimized robot trajectory is then found to traverse these waypoints while minimizing the energy consumption, time, and flow reconstruction error. Simulation results in an unsteady double-gyre flow field is presented to demonstrate the efficacy of the proposed algorithms. Experimental results with an indoor quadcopter are presented to show the feasibility of the resulting trajectory.
Koopman Operator Theory for Nonlinear Dynamic Modeling using Dynamic Mode Decomposition
Oct 16, 2021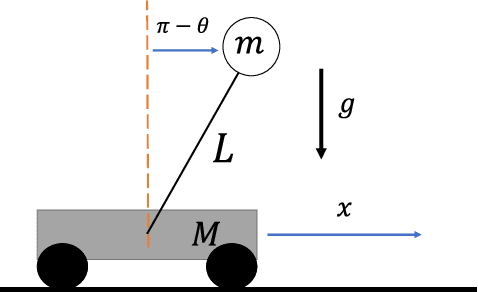
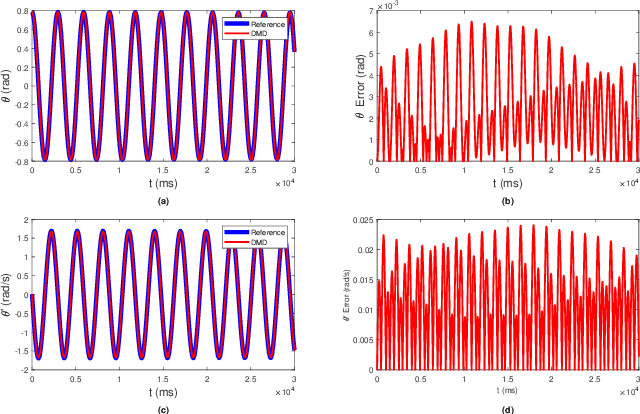
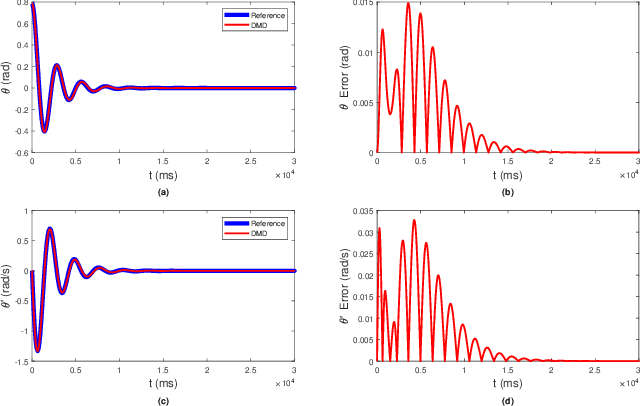
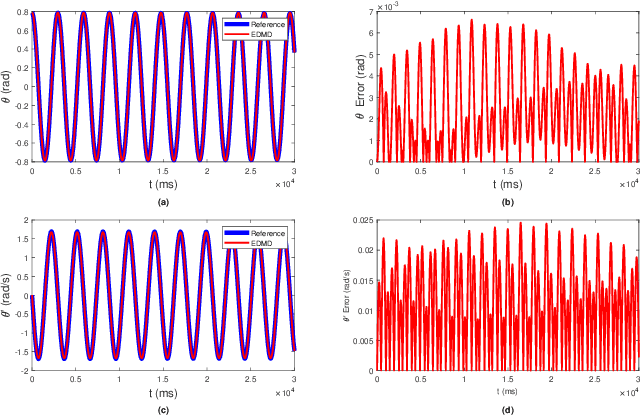
The Koopman operator is a linear operator that describes the evolution of scalar observables (i.e., measurement functions of the states) in an infinitedimensional Hilbert space. This operator theoretic point of view lifts the dynamics of a finite-dimensional nonlinear system to an infinite-dimensional function space where the evolution of the original system becomes linear. In this paper, we provide a brief summary of the Koopman operator theorem for nonlinear dynamics modeling and focus on analyzing several data-driven implementations using dynamical mode decomposition (DMD) for autonomous and controlled canonical problems. We apply the extended dynamic mode decomposition (EDMD) to identify the leading Koopman eigenfunctions and approximate a finite-dimensional representation of the discovered linear dynamics. This allows us to apply linear control approaches towards nonlinear systems without linearization approximations around fixed points. We can then examine the fidelity of using a linear controller based on a Koopman operator approximated system on under-actuated systems with basic maneuvers. We demonstrate the effectiveness of this theory through numerical simulation on two classic dynamical systems are used to show DMD methods of evaluating and approximating the Koopman operator and its effectiveness at linearizing these systems.
Co-design Optimization for Underwater Vehicle Docking Systems
Aug 06, 2021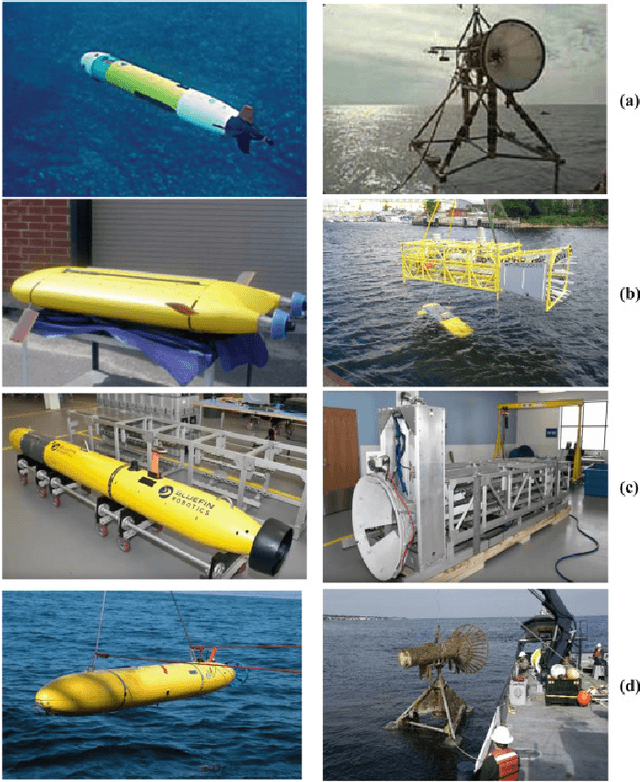
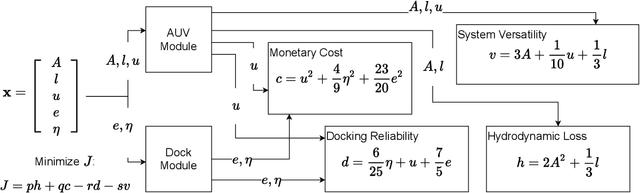
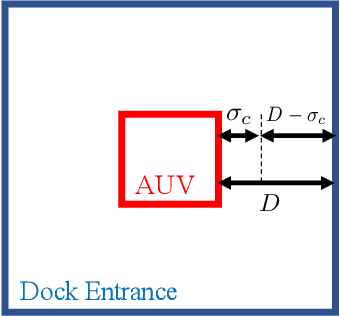
The design of autonomous underwater vehicles (AUVs) and their docking stations has been a popular research topic for several decades. Although many AUV and dock designs have been proposed, materialized, and commercialized, most of these existing designs prioritize the functionality of the AUV over the dock, or vise versa; there has been limited formal research in analytical optimization for AUV docking systems. In this paper, a multidisciplinary optimization framework is presented with the aim to fill this theoretical gap. We propose a co-design optimization method that optimizes multiple design parameters governing the archetype of an AUV and its docking system. Capturing the user design intents in the optimization process, the proposed method produces a set of optimal design parameters that satisfies a set of predefined bounds, constraints, and initial conditions. Three cases of design optimization are reported for different design intents. Each optimal design found in the three cases is compared to an existing system to show the validity of this design optimization framework.
Finite-Horizon, Energy-Optimal Trajectories in Unsteady Flows
Mar 18, 2021
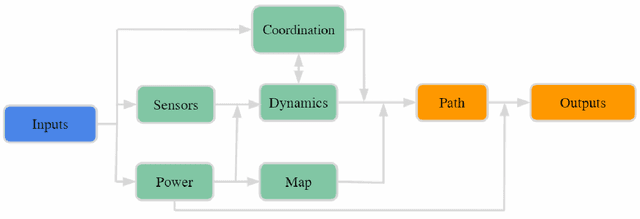
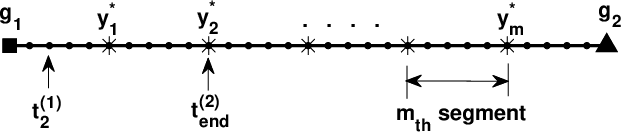
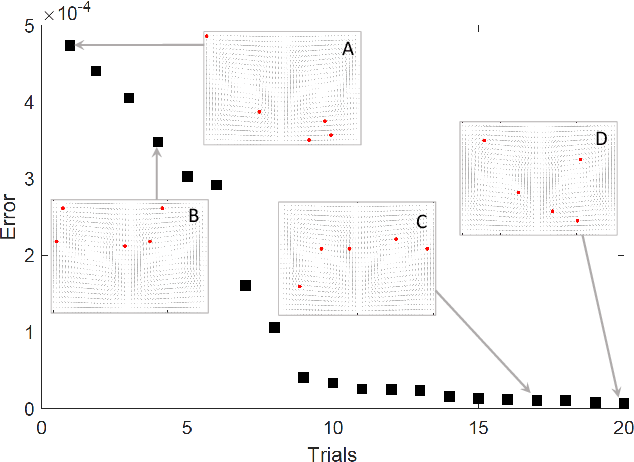
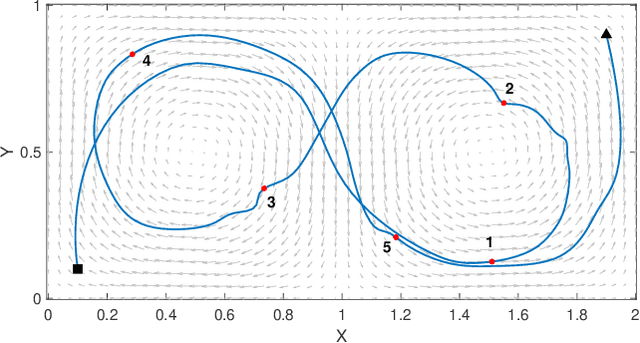
Intelligent mobile sensors, such as uninhabited aerial or underwater vehicles, are becoming prevalent in environmental sensing and monitoring applications. These active sensing platforms operate in unsteady fluid flows, including windy urban environments, hurricanes, and ocean currents. Often constrained in their actuation capabilities, the dynamics of these mobile sensors depend strongly on the background flow, making their deployment and control particularly challenging. Therefore, efficient trajectory planning with partial knowledge about the background flow is essential for teams of mobile sensors to adaptively sense and monitor their environments. In this work, we investigate the use of finite-horizon model predictive control (MPC) for the energy-efficient trajectory planning of an active mobile sensor in an unsteady fluid flow field. We uncover connections between the finite-time optimal trajectories and finite-time Lyapunov exponents (FTLE) of the background flow, confirming that energy-efficient trajectories exploit invariant coherent structures in the flow. We demonstrate our findings on the unsteady double gyre vector field, which is a canonical model for chaotic mixing in the ocean. We present an exhaustive search through critical MPC parameters including the prediction horizon, maximum sensor actuation, and relative penalty on the accumulated state error and actuation effort. We find that even relatively short prediction horizons can often yield nearly energy-optimal trajectories. These results are promising for the adaptive planning of energy-efficient trajectories for swarms of mobile sensors in distributed sensing and monitoring.
Heterogeneous Fixed-wing Aerial Vehicles for Resilient Coverage of an Area
Sep 17, 2020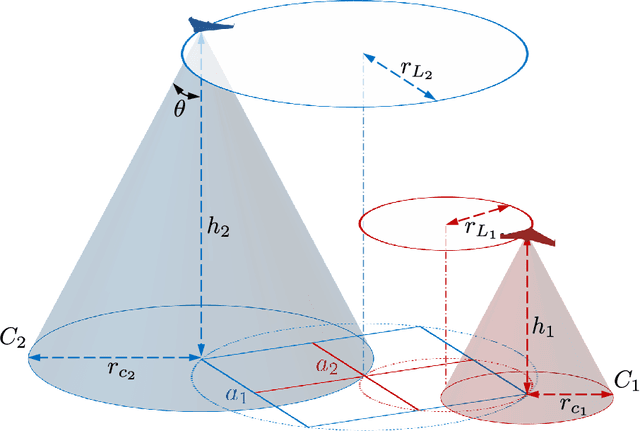
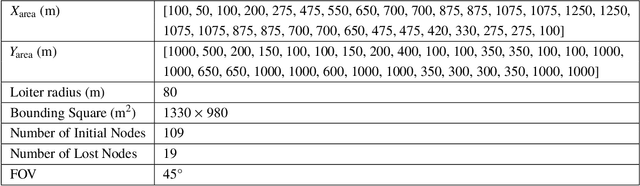
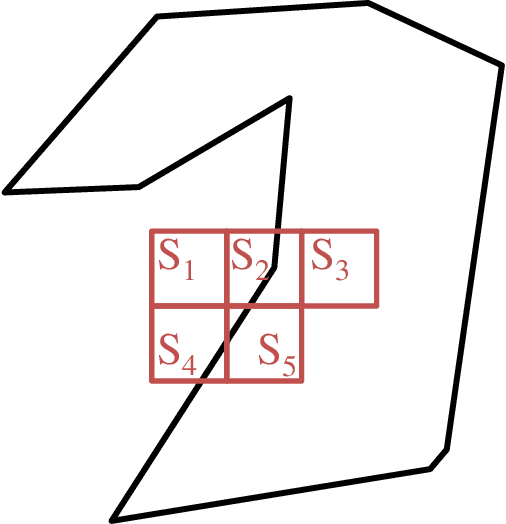
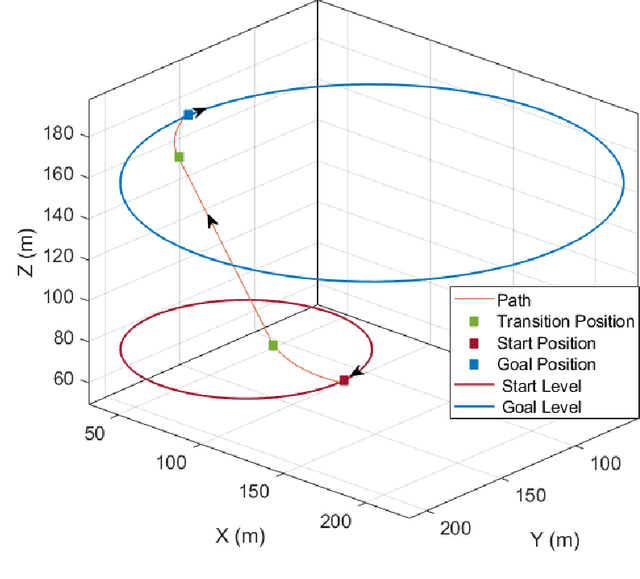
This paper presents a distributed approach to provide persistent coverage of an arbitrarily shaped area using heterogeneous coverage of fixed-wing unmanned aerial vehicles (UAVs), and to recover from simultaneous failures of multiple UAVs. The proposed approach discusses level-homogeneous deployment and maintenance of a homogeneous fleet of fixed-wing UAVs given the boundary information and the minimum loitering radius. The UAVs are deployed at different altitude levels to provide heterogeneous coverage and sensing. We use an efficient square packing method to deploy the UAVs, given the minimum loiter radius and the area boundary. The UAVs loiter over the circles inscribed over these packing squares in a synchronized motion to fulfill the full coverage objective. An top-down hierarchy of the square packing, where each outer square (super-square) is partitioned into four equal-sized inner squares (sub-square), is exploited to introduce resilience in the deployed UAV-network. For a failed sub-square UAV, a replacement neighbor is chosen considering the effective coverage and deployed to the corresponding super-square at a higher altitude to recover full coverage, trading-off with the quality of coverage of the sub-area. This is a distributed approach as all the decision making is done within close range of the loss region, and it can be scaled and adapted to various large scale area and UAV configurations. Simulation results have been presented to illustrate and verify the applicability of the approach.