 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV Path Planning for Optimal Coverage of Areas with Nonuniform Importance
Oct 19, 2021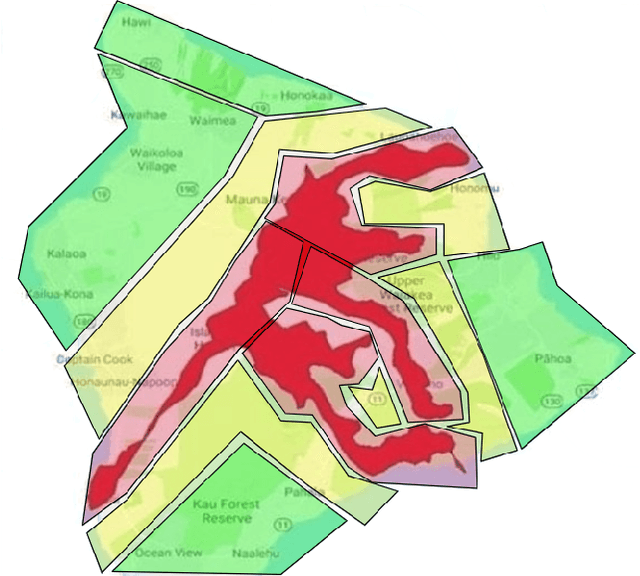
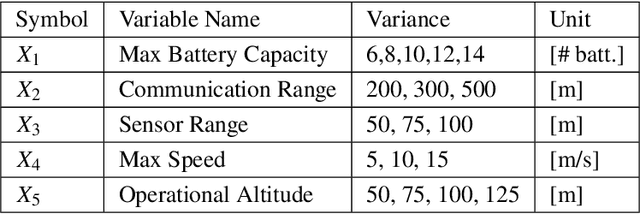
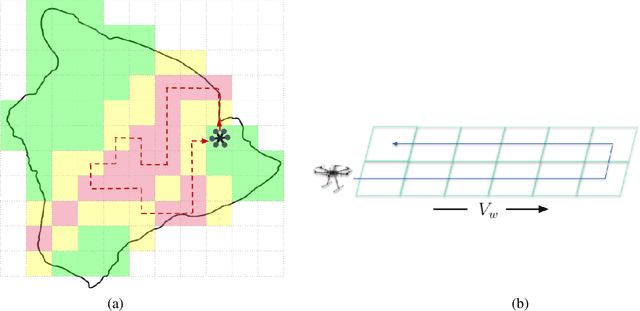
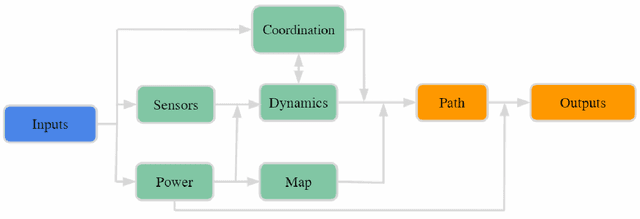
Coverage of an inaccessible or difficult terrain with potential health and safety hazards, such as in a volcanic region, is difficult yet crucial from scientific and meteorological perspectives. Areas contained within this region can provide us with different types of valuable information of varying importance. We present an algorithm to optimally cover a volcanic region in Hawai`i with an unmanned aerial vehicle (UAV). The target region is assigned with a nonuniform coverage importance score distribution. For a specified battery capacity of the UAV, the optimization problem seeks the path that maximizes the total coverage area and the accumulated importance score while penalizing the revisiting of the same area. Trajectories are generated offline for the UAV based on the available power and coverage information map. The optimal trajectory minimizes the unspent battery power while enforcing that the UAV returns to its starting location. This multi-objective optimization problem is solved by using sequential quadratic programming. The details of the competitive optimization problem are discussed along with the analysis and simulation results to demonstrate the applicability of the proposed algorithm.
Dynamic Compressed Sensing of Unsteady Flows with a Mobile Robot
Oct 16, 2021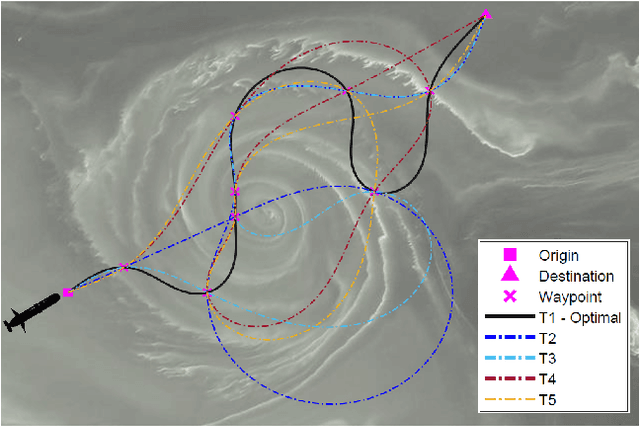
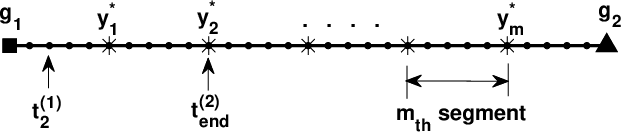
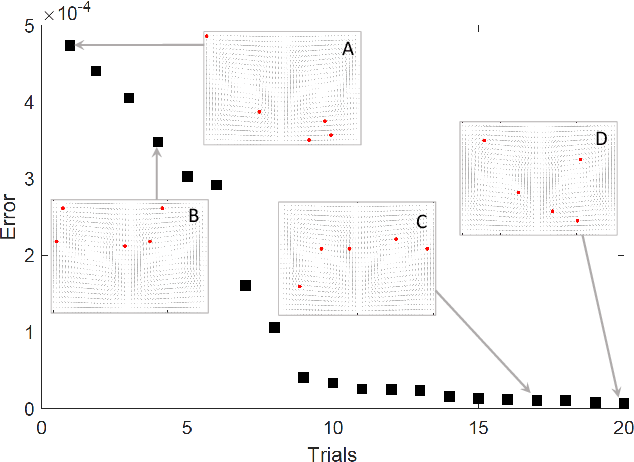
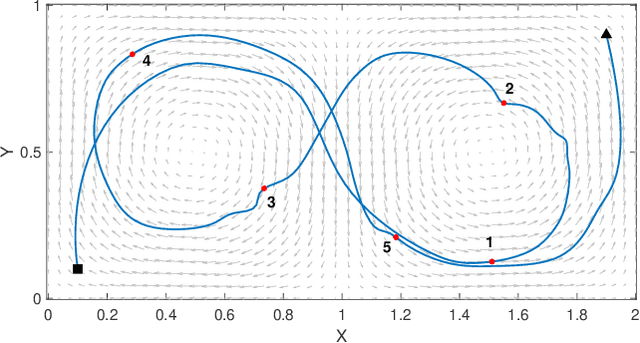
Large-scale environmental sensing with a finite number of mobile sensor is a challenging task that requires a lot of resources and time. This is especially true when features in the environment are spatiotemporally changing with unknown or partially known dynamics. However, these dynamic features often evolve in a low-dimensional space, making it possible to capture their dynamics sufficiently well with only one or several properly planned mobile sensors. This paper investigates the problem of dynamic compressed sensing (DCS) of an unsteady flow field, which takes advantage of the inherently low dimensionality of the underlying flow dynamics to reduce number of waypoints for a mobile sensing robot. The optimal sensing waypoints are identified by an iterative compressed sensing algorithm that optimizes the flow reconstruction based on the proper orthogonal decomposition (POD) modes. An optimized robot trajectory is then found to traverse these waypoints while minimizing the energy consumption, time, and flow reconstruction error. Simulation results in an unsteady double-gyre flow field is presented to demonstrate the efficacy of the proposed algorithms. Experimental results with an indoor quadcopter are presented to show the feasibility of the resulting trajectory.
Heterogeneous Fixed-wing Aerial Vehicles for Resilient Coverage of an Area
Sep 17, 2020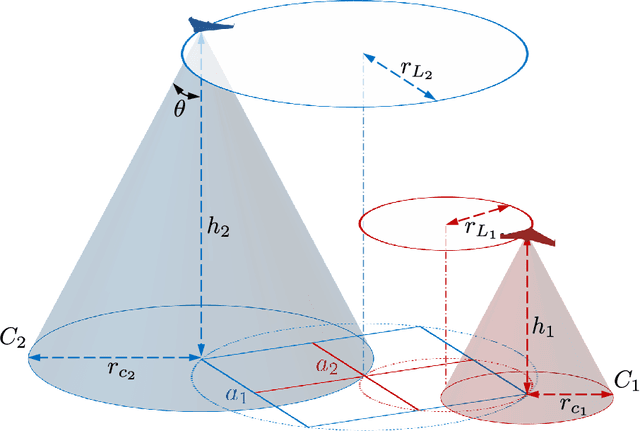
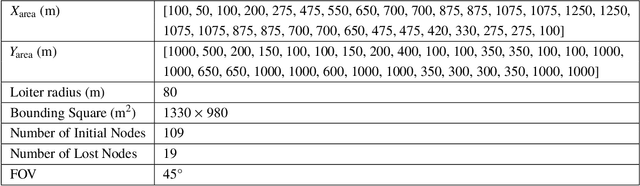
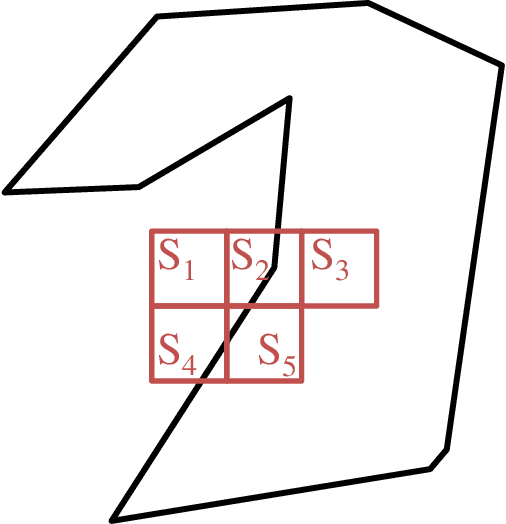
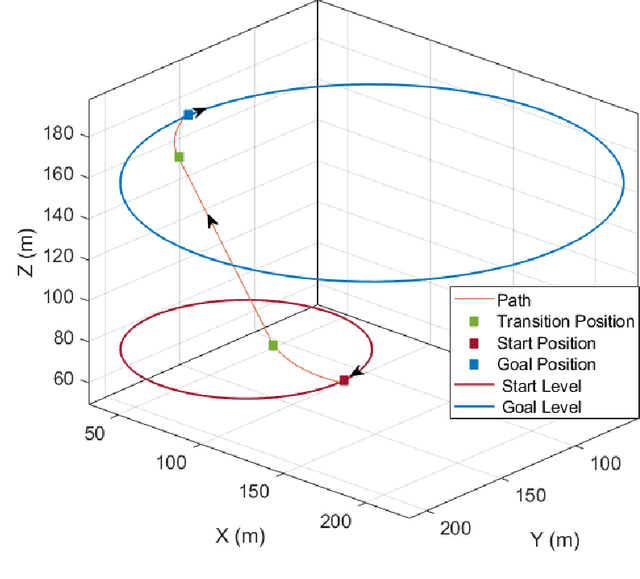
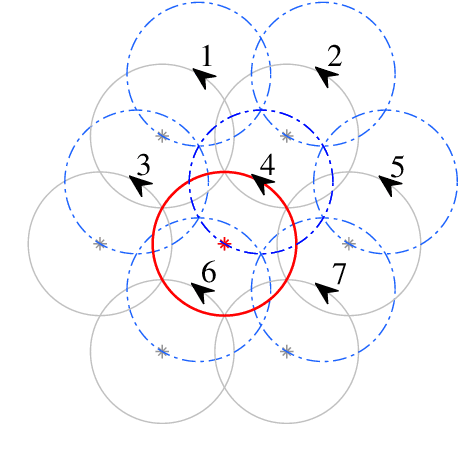
This paper presents a distributed approach to provide persistent coverage of an arbitrarily shaped area using heterogeneous coverage of fixed-wing unmanned aerial vehicles (UAVs), and to recover from simultaneous failures of multiple UAVs. The proposed approach discusses level-homogeneous deployment and maintenance of a homogeneous fleet of fixed-wing UAVs given the boundary information and the minimum loitering radius. The UAVs are deployed at different altitude levels to provide heterogeneous coverage and sensing. We use an efficient square packing method to deploy the UAVs, given the minimum loiter radius and the area boundary. The UAVs loiter over the circles inscribed over these packing squares in a synchronized motion to fulfill the full coverage objective. An top-down hierarchy of the square packing, where each outer square (super-square) is partitioned into four equal-sized inner squares (sub-square), is exploited to introduce resilience in the deployed UAV-network. For a failed sub-square UAV, a replacement neighbor is chosen considering the effective coverage and deployed to the corresponding super-square at a higher altitude to recover full coverage, trading-off with the quality of coverage of the sub-area. This is a distributed approach as all the decision making is done within close range of the loss region, and it can be scaled and adapted to various large scale area and UAV configurations. Simulation results have been presented to illustrate and verify the applicability of the approach.
Coordinated Coverage and Fault Tolerance using Fixed-Wing Unmanned Aerial Vehicles
May 17, 2020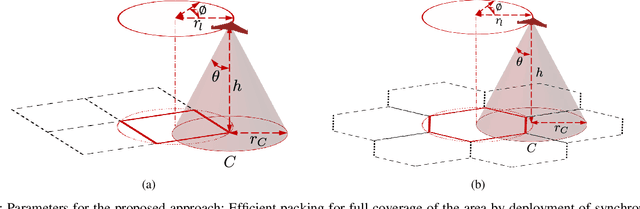
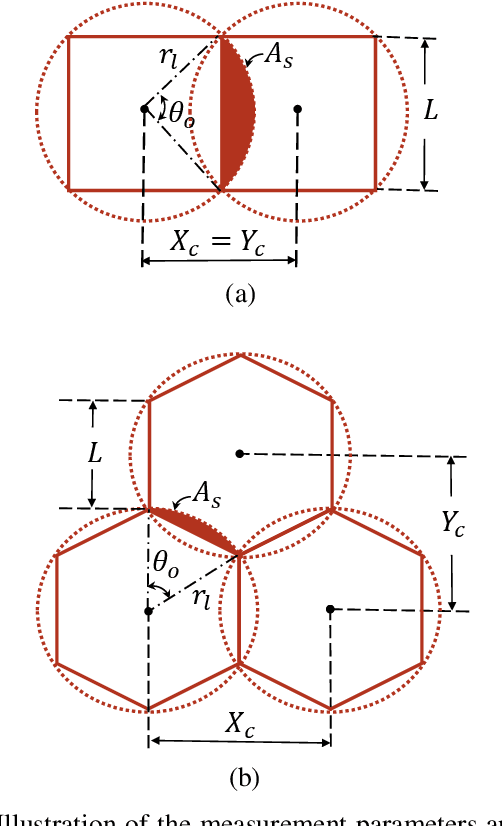
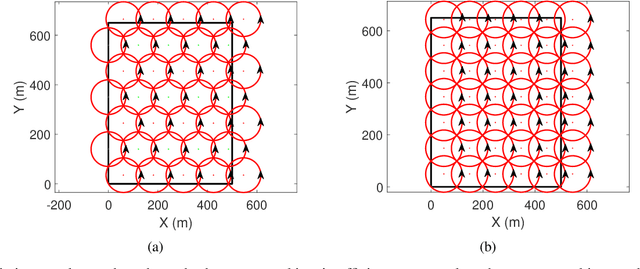
This paper presents an approach for deploying and maintaining a fleet of homogeneous fixed-wing unmanned aerial vehicles (UAVs) for all-time coverage of an area. Two approaches for loiter circle packing have been presented: square and hexagon packing, and the benefits of hexagon packing for minimizing the number of deployed UAVs have been shown. Based on the number of UAVs available and the desired loitering altitude, the proposed algorithm solves an optimization problem to calculate the centres of the loitering circles and the loitering radius for that altitude. The algorithm also incorporates fault recovery capacity in case of simultaneous multiple UAV failures. These failures could form clusters of survivor (active) UAVs over the area with no overall survivor information. The algorithm deploys a super-agent with a larger communication capacity at a higher altitude to recover from the failure. The super-agent collects the information of survivors, and updates the homogeneous radius and the locations of the loitering circles at the same altitude to restore the full coverage. The individual survivor UAVs are then informed and transit to the new loitering circles using Dubin's paths. The relationship with the extent of recoverable loss fractions of the deployed UAVs have been analysed for varying the initial loiter radii. Simulation results have been presented to demonstrate the applicability of the approach and compare the two presented packing approaches.