 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinated Coverage and Fault Tolerance using Fixed-Wing Unmanned Aerial Vehicles
Paper and Code
May 17, 2020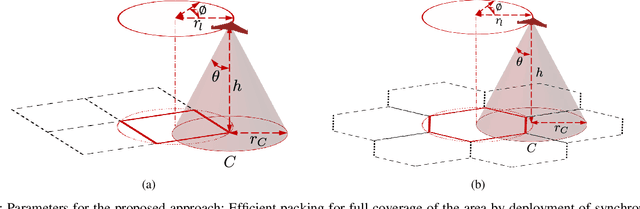
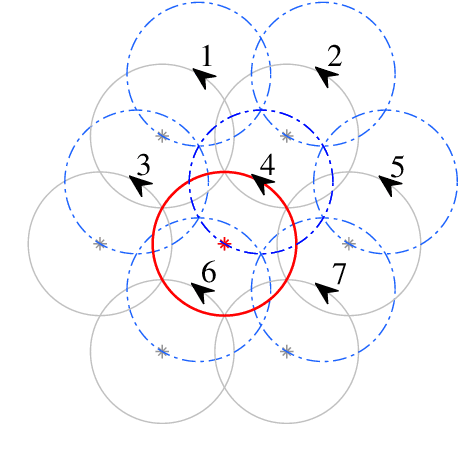
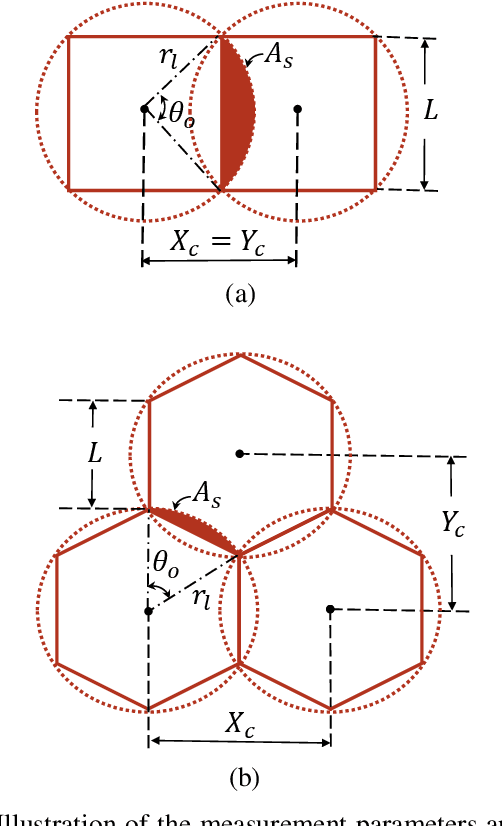
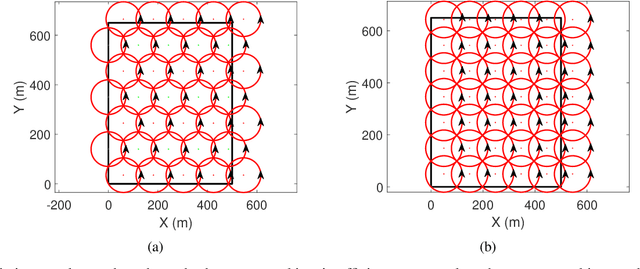
This paper presents an approach for deploying and maintaining a fleet of homogeneous fixed-wing unmanned aerial vehicles (UAVs) for all-time coverage of an area. Two approaches for loiter circle packing have been presented: square and hexagon packing, and the benefits of hexagon packing for minimizing the number of deployed UAVs have been shown. Based on the number of UAVs available and the desired loitering altitude, the proposed algorithm solves an optimization problem to calculate the centres of the loitering circles and the loitering radius for that altitude. The algorithm also incorporates fault recovery capacity in case of simultaneous multiple UAV failures. These failures could form clusters of survivor (active) UAVs over the area with no overall survivor information. The algorithm deploys a super-agent with a larger communication capacity at a higher altitude to recover from the failure. The super-agent collects the information of survivors, and updates the homogeneous radius and the locations of the loitering circles at the same altitude to restore the full coverage. The individual survivor UAVs are then informed and transit to the new loitering circles using Dubin's paths. The relationship with the extent of recoverable loss fractions of the deployed UAVs have been analysed for varying the initial loiter radii. Simulation results have been presented to demonstrate the applicability of the approach and compare the two presented packing approaches.