 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Fixed-wing Aerial Vehicles for Resilient Coverage of an Area
Paper and Code
Sep 17, 2020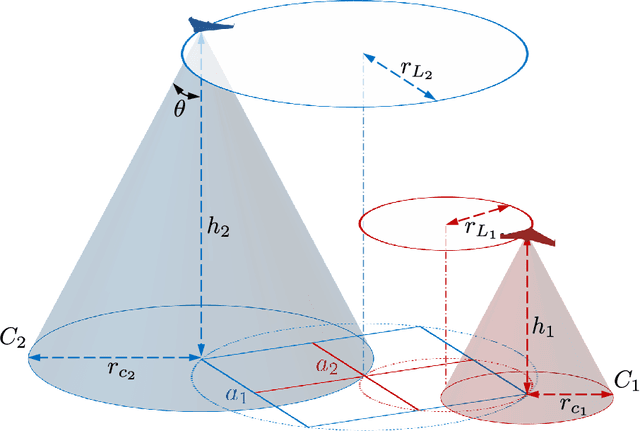
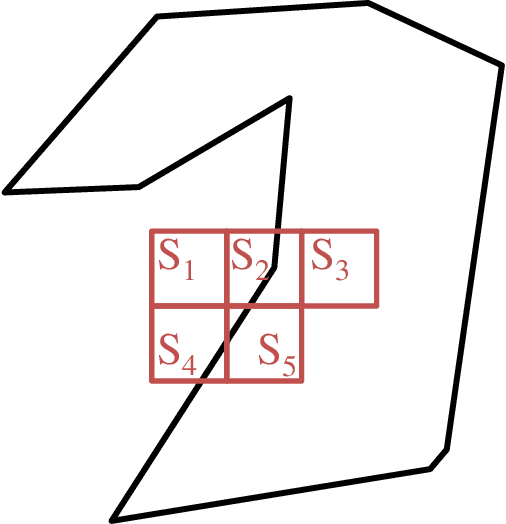
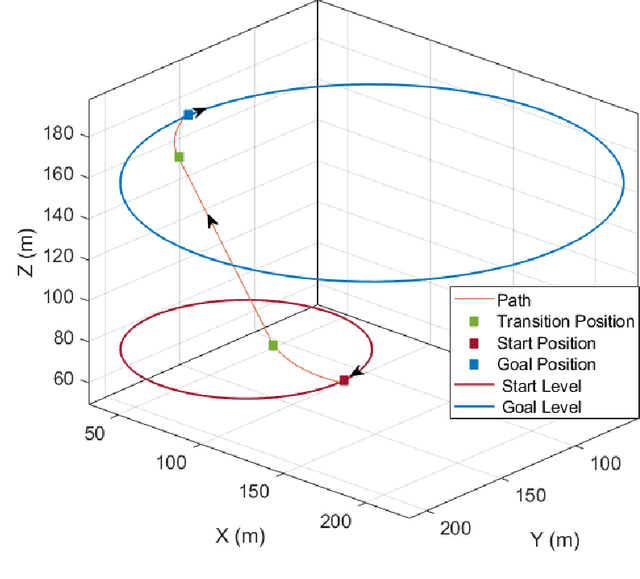
This paper presents a distributed approach to provide persistent coverage of an arbitrarily shaped area using heterogeneous coverage of fixed-wing unmanned aerial vehicles (UAVs), and to recover from simultaneous failures of multiple UAVs. The proposed approach discusses level-homogeneous deployment and maintenance of a homogeneous fleet of fixed-wing UAVs given the boundary information and the minimum loitering radius. The UAVs are deployed at different altitude levels to provide heterogeneous coverage and sensing. We use an efficient square packing method to deploy the UAVs, given the minimum loiter radius and the area boundary. The UAVs loiter over the circles inscribed over these packing squares in a synchronized motion to fulfill the full coverage objective. An top-down hierarchy of the square packing, where each outer square (super-square) is partitioned into four equal-sized inner squares (sub-square), is exploited to introduce resilience in the deployed UAV-network. For a failed sub-square UAV, a replacement neighbor is chosen considering the effective coverage and deployed to the corresponding super-square at a higher altitude to recover full coverage, trading-off with the quality of coverage of the sub-area. This is a distributed approach as all the decision making is done within close range of the loss region, and it can be scaled and adapted to various large scale area and UAV configurations. Simulation results have been presented to illustrate and verify the applicability of the approach.