 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Dimensional Refinement Graph Convolutional Network with Robust Decouple Loss for Fine-Grained Skeleton-Based Action Recognition
Jun 27, 2023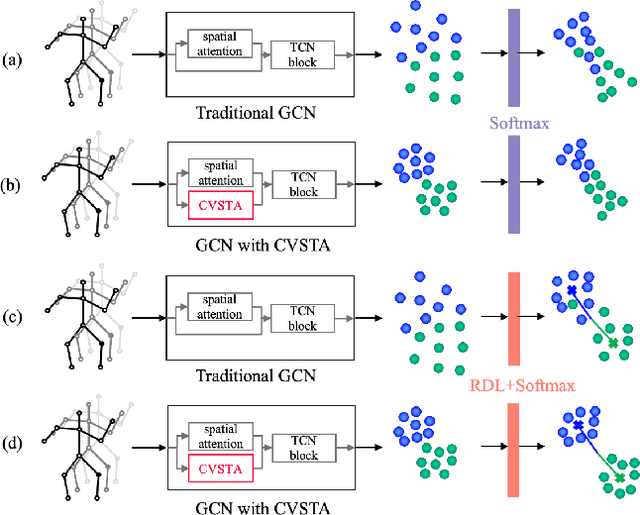
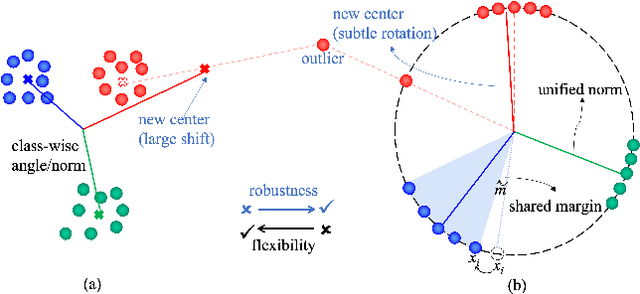
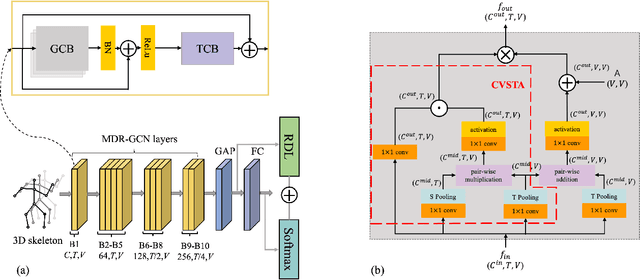

Graph convolutional networks have been widely used in skeleton-based action recognition. However, existing approaches are limited in fine-grained action recognition due to the similarity of inter-class data. Moreover, the noisy data from pose extraction increases the challenge of fine-grained recognition. In this work, we propose a flexible attention block called Channel-Variable Spatial-Temporal Attention (CVSTA) to enhance the discriminative power of spatial-temporal joints and obtain a more compact intra-class feature distribution. Based on CVSTA, we construct a Multi-Dimensional Refinement Graph Convolutional Network (MDR-GCN), which can improve the discrimination among channel-, joint- and frame-level features for fine-grained actions. Furthermore, we propose a Robust Decouple Loss (RDL), which significantly boosts the effect of the CVSTA and reduces the impact of noise. The proposed method combining MDR-GCN with RDL outperforms the known state-of-the-art skeleton-based approaches on fine-grained datasets, FineGym99 and FSD-10, and also on the coarse dataset NTU-RGB+D X-view version.
Resilient Time-Varying Formation Tracking for Mobile Robot Networks under Deception Attacks on Positioning
Oct 20, 2021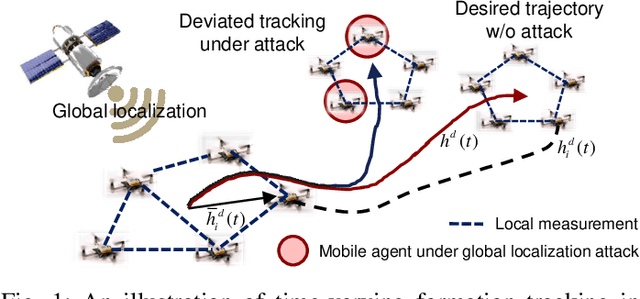
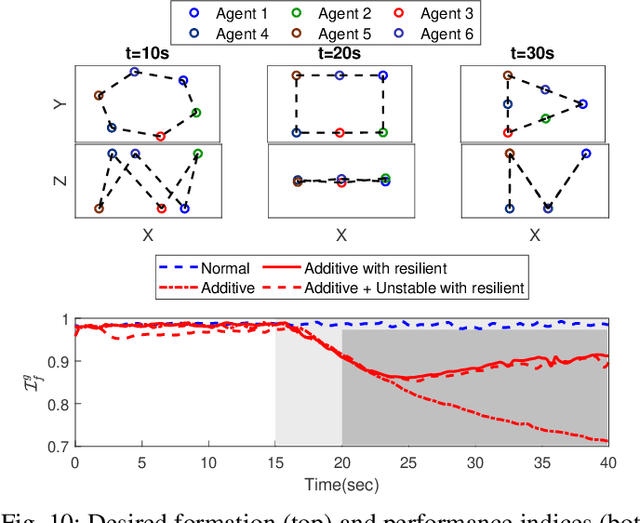

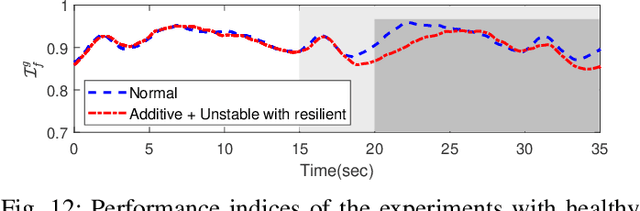
This paper investigates the resilient control, analysis, recovery, and operation of mobile robot networks in time-varying formation tracking under deception attacks on global positioning. Local and global tracking control algorithms are presented to ensure redundancy of the mobile robot network and to retain the desired functionality for better resilience. Lyapunov stability analysis is utilized to show the boundedness of the formation tracking error and the stability of the network under various attack modes. A performance index is designed to compare the efficiency of the proposed formation tracking algorithms in situations with or without positioning attacks. Subsequently, a communication-free decentralized cooperative localization approach based on extended information filters is presented for positioning estimate recovery where the identification of the positioning attacks is based on Kullback-Leibler divergence. A gain-tuning resilient operation is proposed to strategically synthesize the formation control and cooperative localization for accurate and rapid system recovery from positioning attacks. The proposed methods are tested using both numerical simulation and experimental validation with a team of quadrotors.