 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmpirical Prediction of Pedestrian Comfort in Mobile Robot Pedestrian Encounters
Apr 15, 2026Mobile robots joining public spaces like sidewalks must care for pedestrian comfort. Many studies consider pedestrians' objective safety, for example, by developing collision avoidance algorithms, but not enough studies take the pedestrian's subjective safety or comfort into consideration. Quantifying comfort is a major challenge that hinders mobile robots from understanding and responding to human emotions. We empirically look into the relationship between the mobile robot-pedestrian interaction kinematics and subjective comfort. We perform one-on-one experimental trials, each involving a mobile robot and a volunteer. Statistical analysis of pedestrians' reported comfort versus the kinematic variables shows moderate but significant correlations for most variables. Based on these empirical findings, we design three comfort estimators/predictors derived from the minimum distance, the minimum projected time-to-collision, and a composite estimator. The composite estimator employs all studied kinematic variables and reaches the highest prediction rate and classifying performance among the predictors. The composite predictor has an odds ratio of 3.67. In simple terms, when it identifies a pedestrian as comfortable, it is almost 4 times more likely that the pedestrian is comfortable rather than uncomfortable. The study provides a comfort quantifier for incorporating pedestrian feelings into path planners for more socially compliant robots.
Resilient Time-Varying Formation Tracking for Mobile Robot Networks under Deception Attacks on Positioning
Oct 20, 2021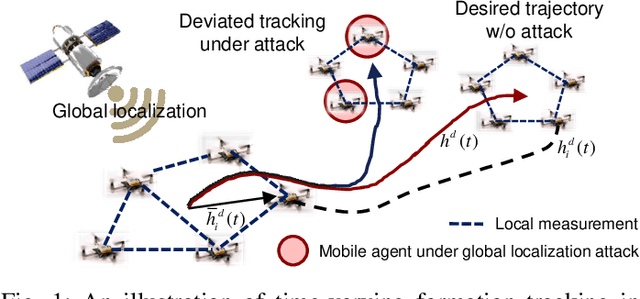
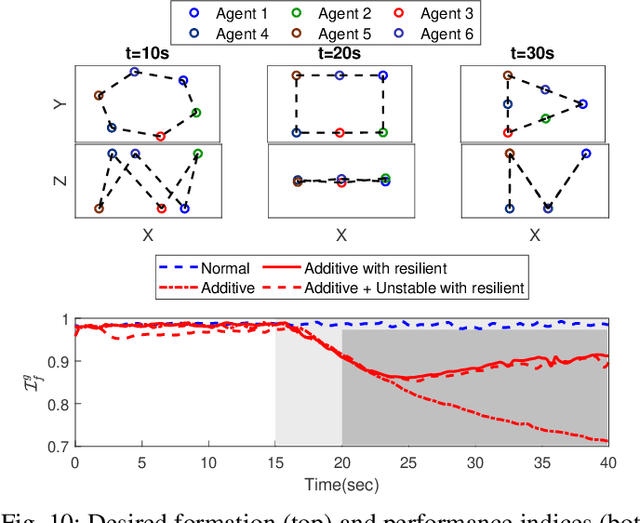

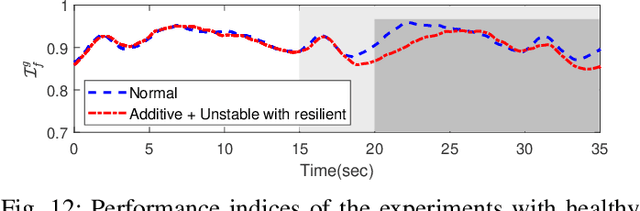
This paper investigates the resilient control, analysis, recovery, and operation of mobile robot networks in time-varying formation tracking under deception attacks on global positioning. Local and global tracking control algorithms are presented to ensure redundancy of the mobile robot network and to retain the desired functionality for better resilience. Lyapunov stability analysis is utilized to show the boundedness of the formation tracking error and the stability of the network under various attack modes. A performance index is designed to compare the efficiency of the proposed formation tracking algorithms in situations with or without positioning attacks. Subsequently, a communication-free decentralized cooperative localization approach based on extended information filters is presented for positioning estimate recovery where the identification of the positioning attacks is based on Kullback-Leibler divergence. A gain-tuning resilient operation is proposed to strategically synthesize the formation control and cooperative localization for accurate and rapid system recovery from positioning attacks. The proposed methods are tested using both numerical simulation and experimental validation with a team of quadrotors.