 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Hull-based Algebraic Constraint for Visual Quadric SLAM
Mar 03, 2025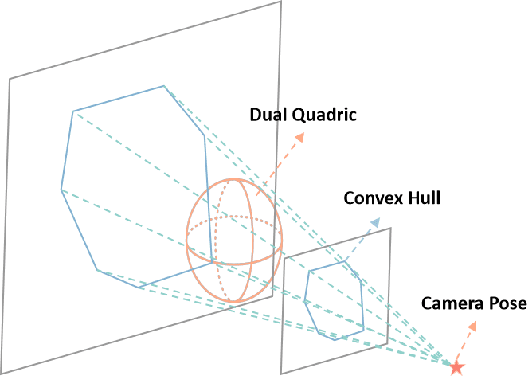
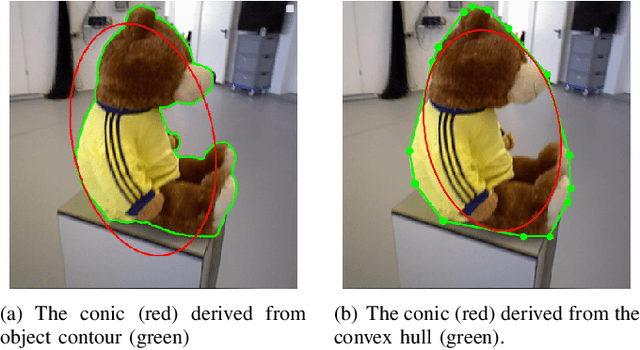
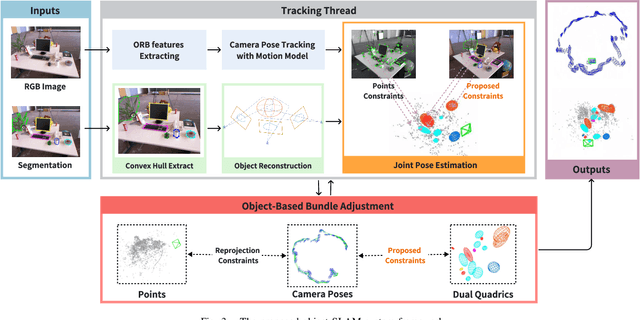
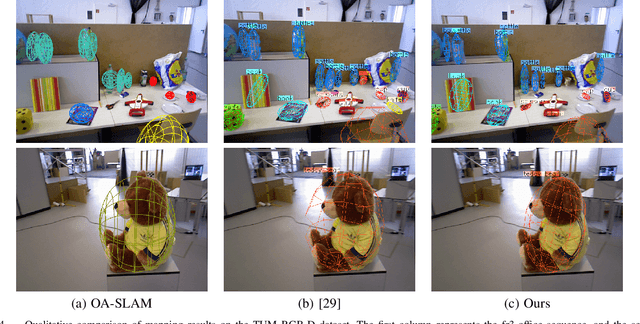
Using Quadrics as the object representation has the benefits of both generality and closed-form projection derivation between image and world spaces. Although numerous constraints have been proposed for dual quadric reconstruction, we found that many of them are imprecise and provide minimal improvements to localization.After scrutinizing the existing constraints, we introduce a concise yet more precise convex hull-based algebraic constraint for object landmarks, which is applied to object reconstruction, frontend pose estimation, and backend bundle adjustment.This constraint is designed to fully leverage precise semantic segmentation, effectively mitigating mismatches between complex-shaped object contours and dual quadrics.Experiments on public datasets demonstrate that our approach is applicable to both monocular and RGB-D SLAM and achieves improved object mapping and localization than existing quadric SLAM methods. The implementation of our method is available at https://github.com/tiev-tongji/convexhull-based-algebraic-constraint.
LOG-LIO2: A LiDAR-Inertial Odometry with Efficient Uncertainty Analysis
May 02, 2024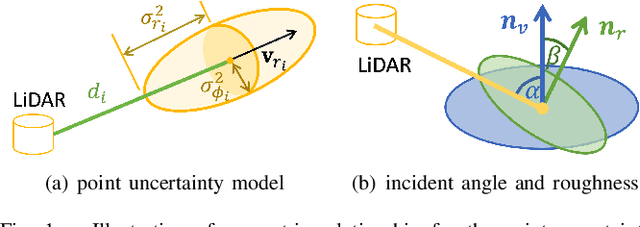
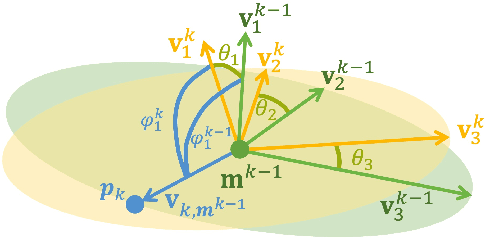
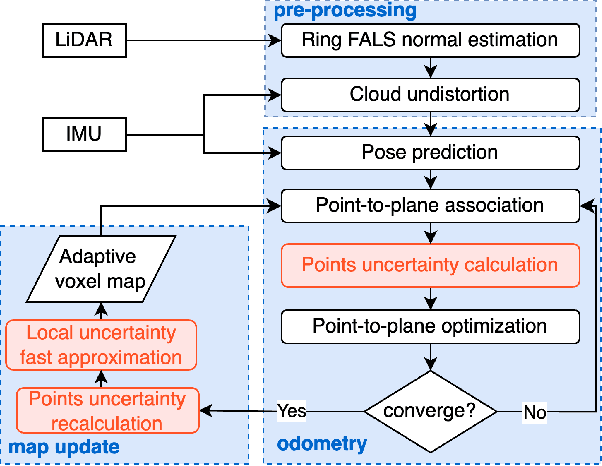
Uncertainty in LiDAR measurements, stemming from factors such as range sensing, is crucial for LIO (LiDAR-Inertial Odometry) systems as it affects the accurate weighting in the loss function. While recent LIO systems address uncertainty related to range sensing, the impact of incident angle on uncertainty is often overlooked by the community. Moreover, the existing uncertainty propagation methods suffer from computational inefficiency. This paper proposes a comprehensive point uncertainty model that accounts for both the uncertainties from LiDAR measurements and surface characteristics, along with an efficient local uncertainty analytical method for LiDAR-based state estimation problem. We employ a projection operator that separates the uncertainty into the ray direction and its orthogonal plane. Then, we derive incremental Jacobian matrices of eigenvalues and eigenvectors w.r.t. points, which enables a fast approximation of uncertainty propagation. This approach eliminates the requirement for redundant traversal of points, significantly reducing the time complexity of uncertainty propagation from $\mathcal{O} (n)$ to $\mathcal{O} (1)$ when a new point is added. Simulations and experiments on public datasets are conducted to validate the accuracy and efficiency of our formulations. The proposed methods have been integrated into a LIO system, which is available at https://github.com/tiev-tongji/LOG-LIO2.
CogCartoon: Towards Practical Story Visualization
Dec 17, 2023

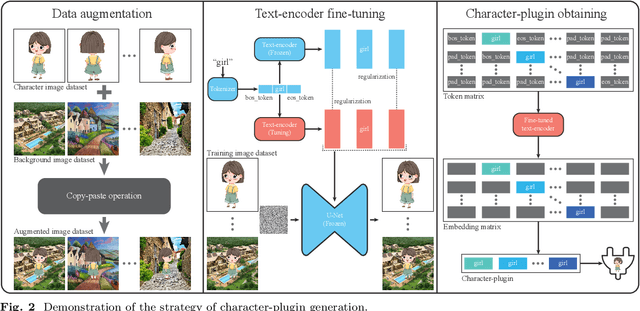

The state-of-the-art methods for story visualization demonstrate a significant demand for training data and storage, as well as limited flexibility in story presentation, thereby rendering them impractical for real-world applications. We introduce CogCartoon, a practical story visualization method based on pre-trained diffusion models. To alleviate dependence on data and storage, we propose an innovative strategy of character-plugin generation that can represent a specific character as a compact 316 KB plugin by using a few training samples. To facilitate enhanced flexibility, we employ a strategy of plugin-guided and layout-guided inference, enabling users to seamlessly incorporate new characters and custom layouts into the generated image results at their convenience. We have conducted comprehensive qualitative and quantitative studies, providing compelling evidence for the superiority of CogCartoon over existing methodologies. Moreover, CogCartoon demonstrates its power in tackling challenging tasks, including long story visualization and realistic style story visualization.
LOG-LIO: A LiDAR-Inertial Odometry with Efficient Local Geometric Information Estimation
Jul 18, 2023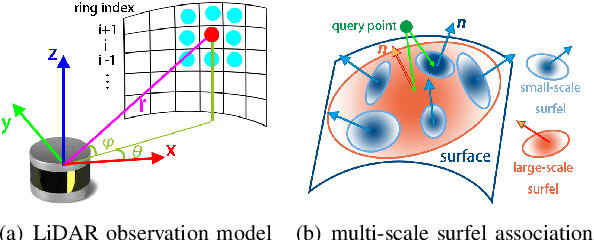



Local geometric information, i.e. normal and point distribution, is crucial for LiDAR-based simultaneous localization and mapping (SLAM) because it provides constrains for data association, which further determines the direction of optimization and ultimately affects the accuracy of poses. However, estimating normal and point distribution are time-consuming tasks even with the assistance of the KDtree or volumetic maps. To achieve fast normal estimation, we look into the structural information of LiDAR scan and propose a novel fast approximate least squares (FALS) method. With the pre-computed bearing information, estimating the normal requires only the range information of the points when a new scan arrives. To efficiently estimate the distribution of points, we extend the ikd-tree to manage the map in voxels and update its point cloud distribution incrementally while maintaining its consistency with the normals. For scan points that satisfy visibility and consistency checks based on normal, we devise a robust and accurate hierarchical data association schema considering the distribution where point-to-surfel is prioritized over point-to-plane. We further fix voxels after the distribution convergences to balance the time consumption and the correctness of representation. Extensive experiments on diverse public datasets demonstrate the advantages of our system compared to other state-of-the-art methods.
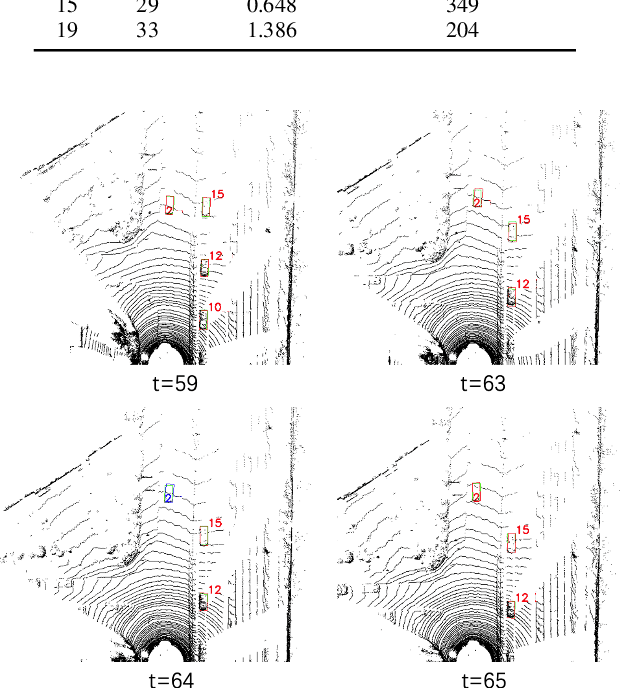
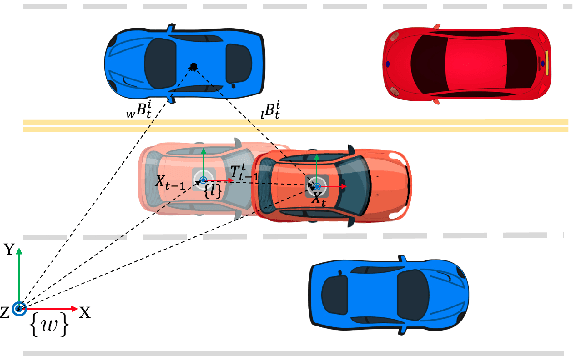
LIMOT: A Tightly-Coupled System for LiDAR-Inertial Odometry and Multi-Object Tracking
Apr 30, 2023
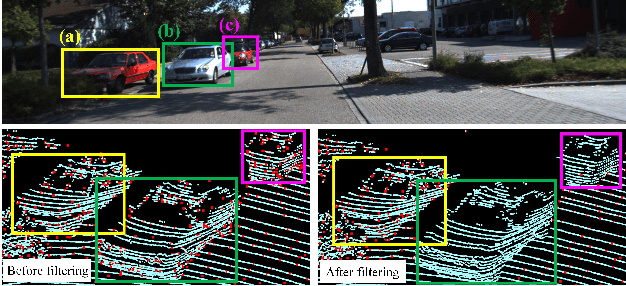
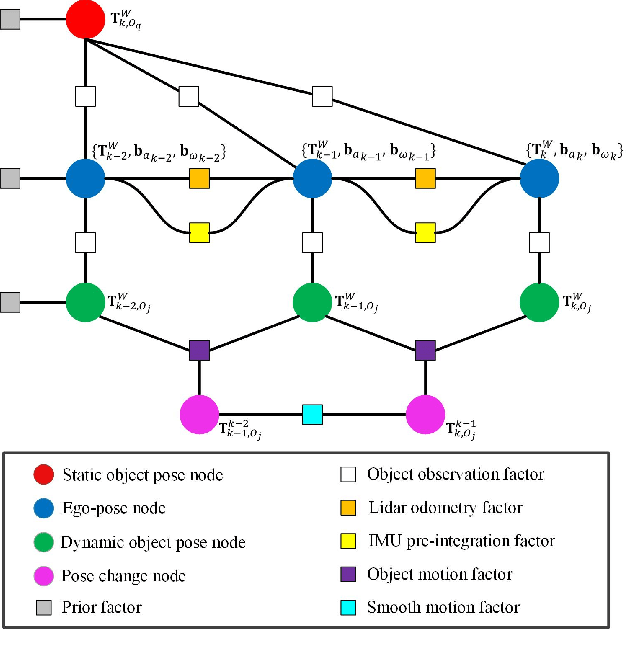
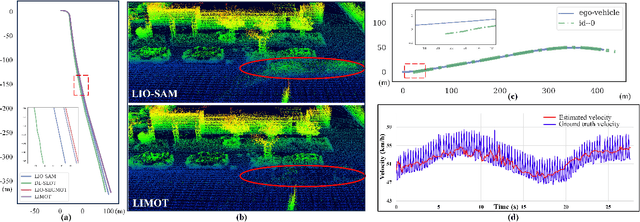
Simultaneous localization and mapping (SLAM) is critical to the implementation of autonomous driving. Most LiDAR-inertial SLAM algorithms assume a static environment, leading to unreliable localization in dynamic environments. Furthermore, accurate tracking of moving objects is of great significance for the control and planning of autonomous vehicle operation. This study proposes LIMOT, a tightly-coupled multi-object tracking and LiDAR-inertial SLAM system capable of accurately estimating the poses of both ego-vehicle and objects. First, we use 3D bounding boxes generated by an object detector to represent all movable objects and perform LiDAR odometry using inertial measurement unit (IMU) pre-integration result. Based on the historical trajectories of tracked objects in a sliding window, we perform robust object association. We propose a trajectory-based dynamic feature filtering method, which filters out features belonging to moving objects by leveraging tracking results. Factor graph-based optimization is then conducted to optimize the bias of the IMU and the poses of both the ego-vehicle and surrounding objects in a sliding window. Experiments conducted on KITTI datasets show that our method achieves better pose and tracking accuracy than our previous work DL-SLOT and other SLAM and multi-object tracking baseline methods.
DL-SLOT: Dynamic LiDAR SLAM and object tracking based on collaborative graph optimization
Dec 05, 2022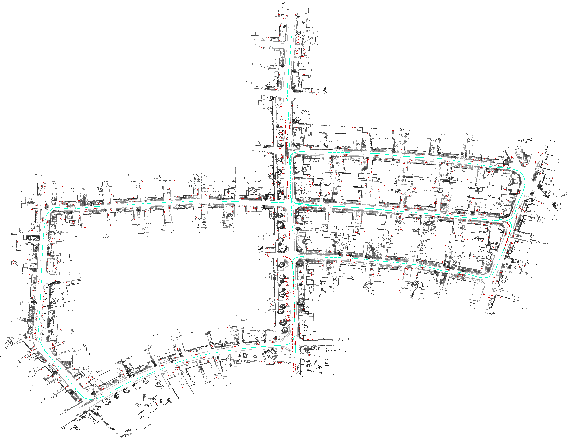
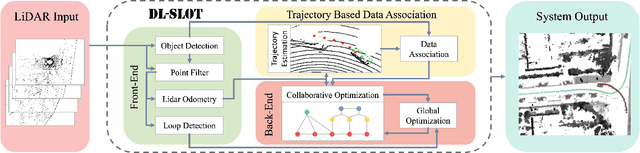
Ego-pose estimation and dynamic object tracking are two critical problems for autonomous driving systems. The solutions to these problems are generally based on their respective assumptions, \ie{the static world assumption for simultaneous localization and mapping (SLAM) and the accurate ego-pose assumption for object tracking}. However, these assumptions are challenging to hold in dynamic road scenarios, where SLAM and object tracking become closely correlated. Therefore, we propose DL-SLOT, a dynamic LiDAR SLAM and object tracking method, to simultaneously address these two coupled problems. This method integrates the state estimations of both the autonomous vehicle and the stationary and dynamic objects in the environment into a unified optimization framework. First, we used object detection to identify all points belonging to potentially dynamic objects. Subsequently, a LiDAR odometry was conducted using the filtered point cloud. Simultaneously, we proposed a sliding window-based object association method that accurately associates objects according to the historical trajectories of tracked objects. The ego-states and those of the stationary and dynamic objects are integrated into the sliding window-based collaborative graph optimization. The stationary objects are subsequently restored from the potentially dynamic object set. Finally, a global pose-graph is implemented to eliminate the accumulated error. Experiments on KITTI datasets demonstrate that our method achieves better accuracy than SLAM and object tracking baseline methods. This confirms that solving SLAM and object tracking simultaneously is mutually advantageous, dramatically improving the robustness and accuracy of SLAM and object tracking in dynamic road scenarios.