 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLOG-LIO: A LiDAR-Inertial Odometry with Efficient Local Geometric Information Estimation
Paper and Code
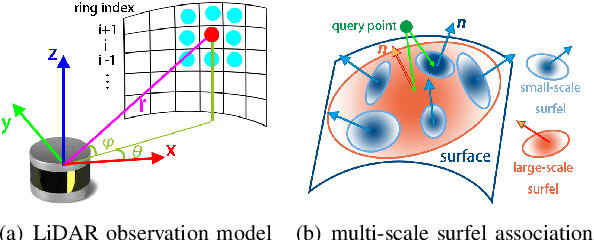



Local geometric information, i.e. normal and point distribution, is crucial for LiDAR-based simultaneous localization and mapping (SLAM) because it provides constrains for data association, which further determines the direction of optimization and ultimately affects the accuracy of poses. However, estimating normal and point distribution are time-consuming tasks even with the assistance of the KDtree or volumetic maps. To achieve fast normal estimation, we look into the structural information of LiDAR scan and propose a novel fast approximate least squares (FALS) method. With the pre-computed bearing information, estimating the normal requires only the range information of the points when a new scan arrives. To efficiently estimate the distribution of points, we extend the ikd-tree to manage the map in voxels and update its point cloud distribution incrementally while maintaining its consistency with the normals. For scan points that satisfy visibility and consistency checks based on normal, we devise a robust and accurate hierarchical data association schema considering the distribution where point-to-surfel is prioritized over point-to-plane. We further fix voxels after the distribution convergences to balance the time consumption and the correctness of representation. Extensive experiments on diverse public datasets demonstrate the advantages of our system compared to other state-of-the-art methods.