 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLIMOT: A Tightly-Coupled System for LiDAR-Inertial Odometry and Multi-Object Tracking
Apr 30, 2023
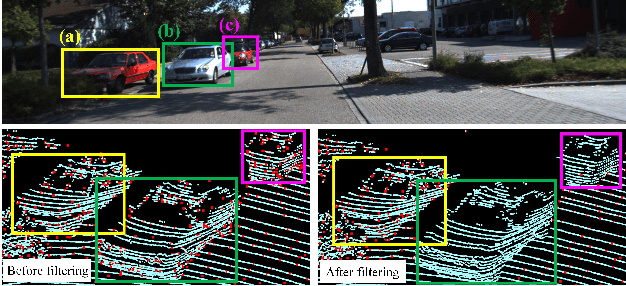
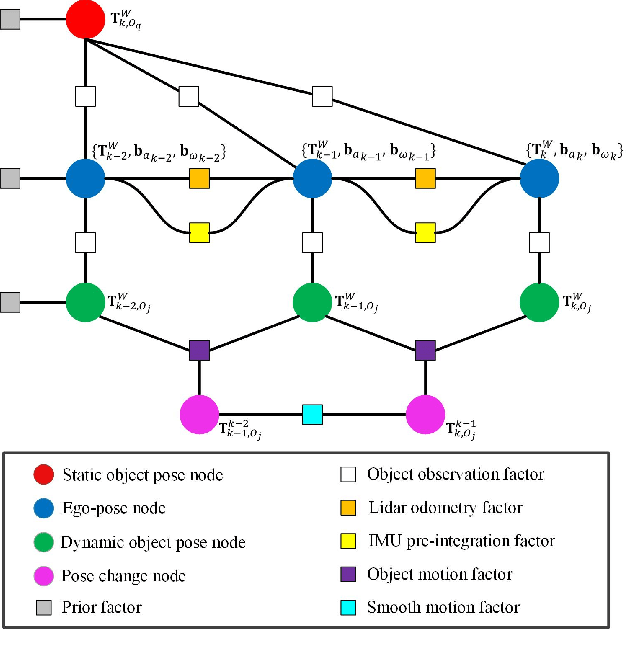
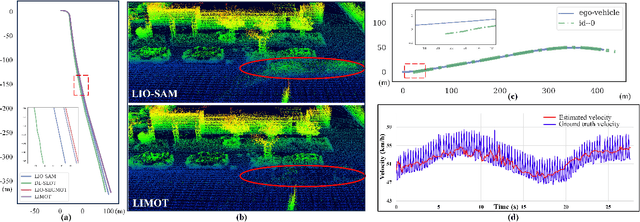
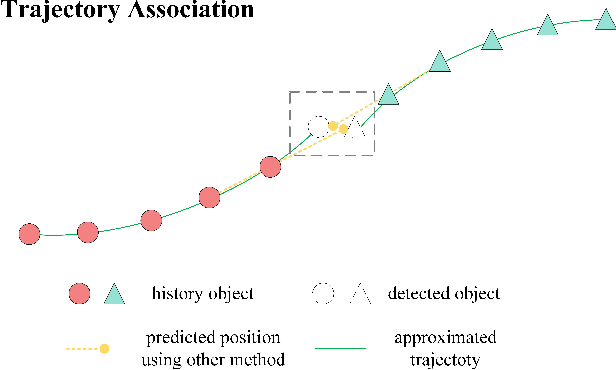
Simultaneous localization and mapping (SLAM) is critical to the implementation of autonomous driving. Most LiDAR-inertial SLAM algorithms assume a static environment, leading to unreliable localization in dynamic environments. Furthermore, accurate tracking of moving objects is of great significance for the control and planning of autonomous vehicle operation. This study proposes LIMOT, a tightly-coupled multi-object tracking and LiDAR-inertial SLAM system capable of accurately estimating the poses of both ego-vehicle and objects. First, we use 3D bounding boxes generated by an object detector to represent all movable objects and perform LiDAR odometry using inertial measurement unit (IMU) pre-integration result. Based on the historical trajectories of tracked objects in a sliding window, we perform robust object association. We propose a trajectory-based dynamic feature filtering method, which filters out features belonging to moving objects by leveraging tracking results. Factor graph-based optimization is then conducted to optimize the bias of the IMU and the poses of both the ego-vehicle and surrounding objects in a sliding window. Experiments conducted on KITTI datasets show that our method achieves better pose and tracking accuracy than our previous work DL-SLOT and other SLAM and multi-object tracking baseline methods.
DL-SLOT: Dynamic LiDAR SLAM and object tracking based on collaborative graph optimization
Dec 05, 2022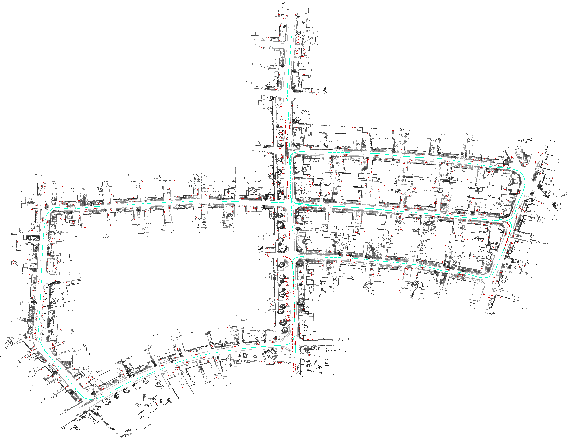
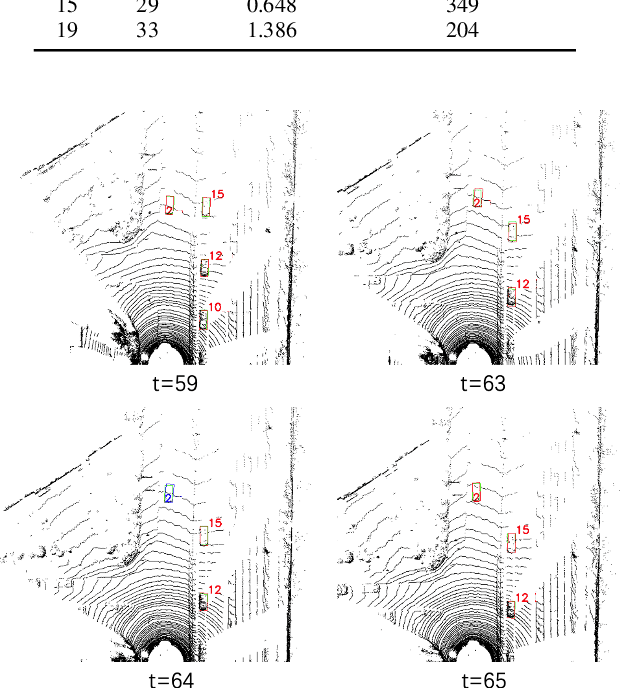
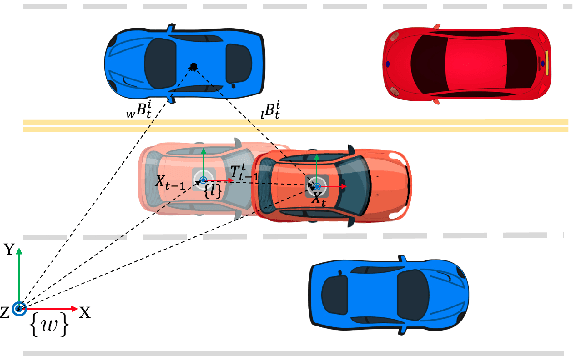
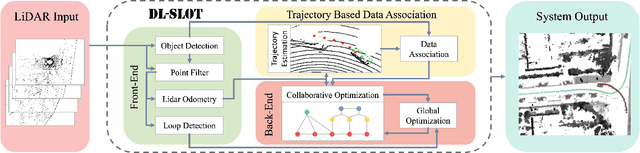
Ego-pose estimation and dynamic object tracking are two critical problems for autonomous driving systems. The solutions to these problems are generally based on their respective assumptions, \ie{the static world assumption for simultaneous localization and mapping (SLAM) and the accurate ego-pose assumption for object tracking}. However, these assumptions are challenging to hold in dynamic road scenarios, where SLAM and object tracking become closely correlated. Therefore, we propose DL-SLOT, a dynamic LiDAR SLAM and object tracking method, to simultaneously address these two coupled problems. This method integrates the state estimations of both the autonomous vehicle and the stationary and dynamic objects in the environment into a unified optimization framework. First, we used object detection to identify all points belonging to potentially dynamic objects. Subsequently, a LiDAR odometry was conducted using the filtered point cloud. Simultaneously, we proposed a sliding window-based object association method that accurately associates objects according to the historical trajectories of tracked objects. The ego-states and those of the stationary and dynamic objects are integrated into the sliding window-based collaborative graph optimization. The stationary objects are subsequently restored from the potentially dynamic object set. Finally, a global pose-graph is implemented to eliminate the accumulated error. Experiments on KITTI datasets demonstrate that our method achieves better accuracy than SLAM and object tracking baseline methods. This confirms that solving SLAM and object tracking simultaneously is mutually advantageous, dramatically improving the robustness and accuracy of SLAM and object tracking in dynamic road scenarios.
DL-SLOT: Dynamic Lidar SLAM and Object Tracking Based On Graph Optimization
Feb 23, 2022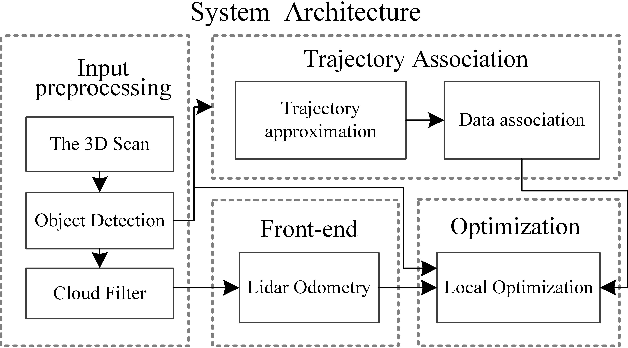
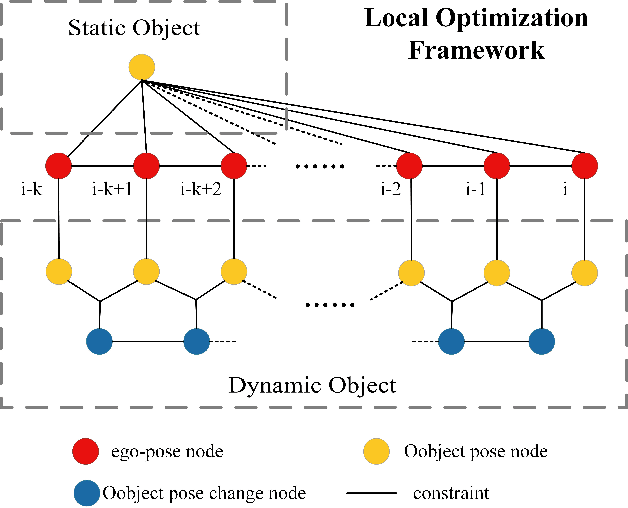
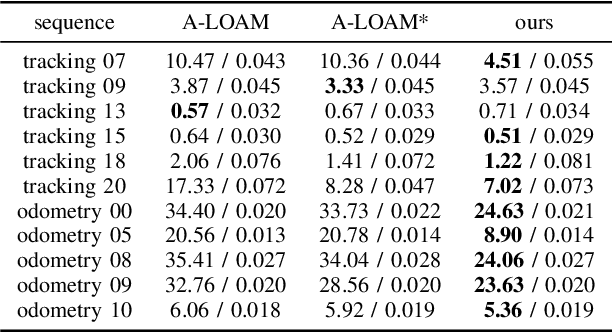
Ego-pose estimation and dynamic object tracking are two key issues in an autonomous driving system. Two assumptions are often made for them, i.e. the static world assumption of simultaneous localization and mapping (SLAM) and the exact ego-pose assumption of object tracking, respectively. However, these assumptions are difficult to hold in highly dynamic road scenarios where SLAM and object tracking become correlated and mutually beneficial. In this paper, DL-SLOT, a dynamic Lidar SLAM and object tracking method is proposed. This method integrates the state estimations of both the ego vehicle and the static and dynamic objects in the environment into a unified optimization framework, to realize SLAM and object tracking (SLOT) simultaneously. Firstly, we implement object detection to remove all the points that belong to potential dynamic objects. Then, LiDAR odometry is conducted using the filtered point cloud. At the same time, detected objects are associated with the history object trajectories based on the time-series information in a sliding window. The states of the static and dynamic objects and ego vehicle in the sliding window are integrated into a unified local optimization framework. We perform SLAM and object tracking simultaneously in this framework, which significantly improves the robustness and accuracy of SLAM in highly dynamic road scenarios and the accuracy of objects' states estimation. Experiments on public datasets have shown that our method achieves better accuracy than A-LOAM.