 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Term Dynamic Window Approach for Kinodynamic Local Planning in Static and Crowd Environments
Oct 04, 2023Local planning for a differential wheeled robot is designed to generate kinodynamic feasible actions that guide the robot to a goal position along the navigation path while avoiding obstacles. Reactive, predictive, and learning-based methods are widely used in local planning. However, few of them can fit static and crowd environments while satisfying kinodynamic constraints simultaneously. To solve this problem, we propose a novel local planning method. The method applies a long-term dynamic window approach to generate an initial trajectory and then optimizes it with graph optimization. The method can plan actions under the robot's kinodynamic constraints in real time while allowing the generated actions to be safer and more jitterless. Experimental results show that the proposed method adapts well to crowd and static environments and outperforms most SOTA approaches.
* 9 pages, 7 figures
Adaptive Spatio-Temporal Voxels Based Trajectory Planning for Autonomous Driving in Highway Traffic Flow
Oct 04, 2023
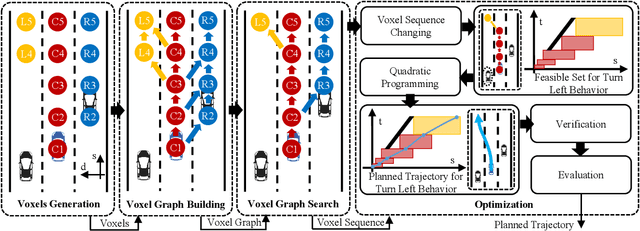
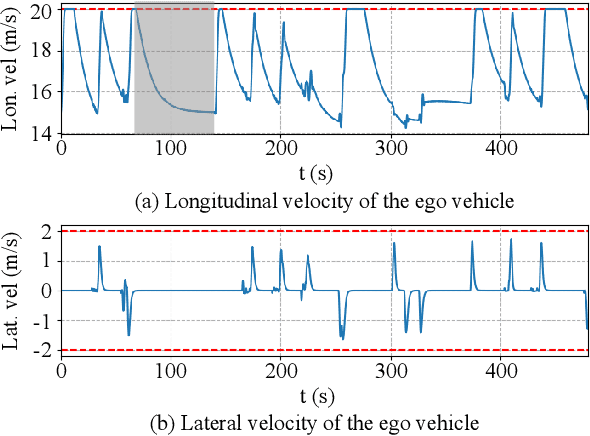
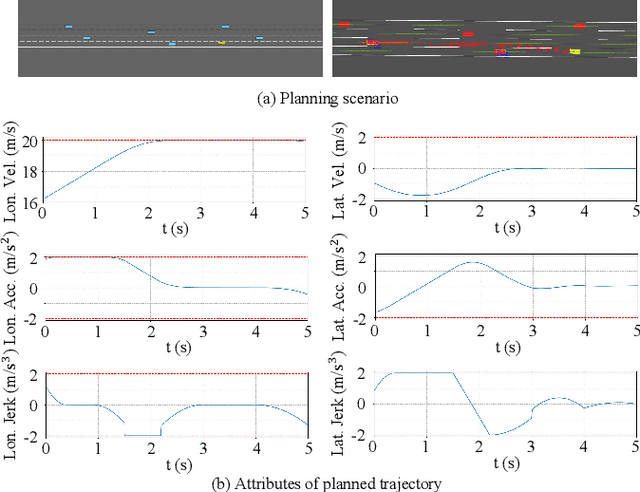
Trajectory planning is crucial for the safe driving of autonomous vehicles in highway traffic flow. Currently, some advanced trajectory planning methods utilize spatio-temporal voxels to construct feasible regions and then convert trajectory planning into optimization problem solving based on the feasible regions. However, these feasible region construction methods cannot adapt to the changes in dynamic environments, making them difficult to apply in complex traffic flow. In this paper, we propose a trajectory planning method based on adaptive spatio-temporal voxels which improves the construction of feasible regions and trajectory optimization while maintaining the quadratic programming form. The method can adjust feasible regions and trajectory planning according to real-time traffic flow and environmental changes, realizing vehicles to drive safely in complex traffic flow. The proposed method has been tested in both open-loop and closed-loop environments, and the test results show that our method outperforms the current planning methods.
* 8 pages, 5 figures
InteractionNet: Joint Planning and Prediction for Autonomous Driving with Transformers
Sep 07, 2023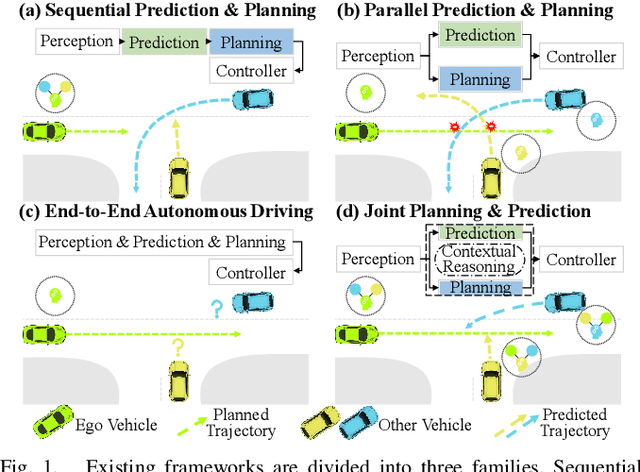
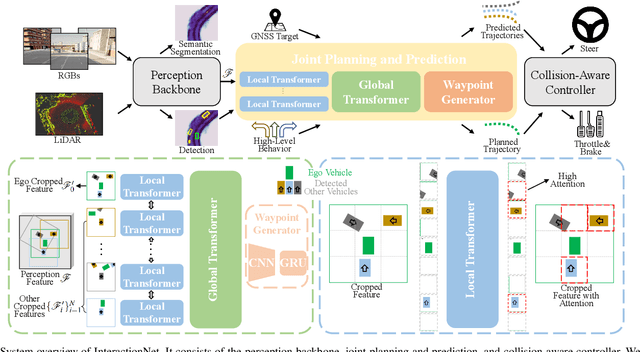
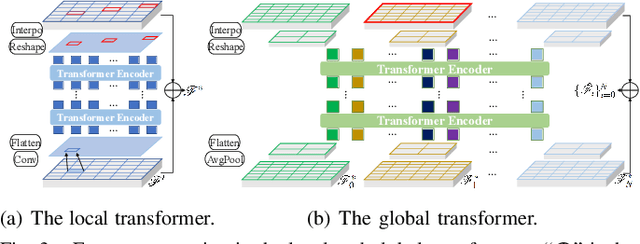

Planning and prediction are two important modules of autonomous driving and have experienced tremendous advancement recently. Nevertheless, most existing methods regard planning and prediction as independent and ignore the correlation between them, leading to the lack of consideration for interaction and dynamic changes of traffic scenarios. To address this challenge, we propose InteractionNet, which leverages transformer to share global contextual reasoning among all traffic participants to capture interaction and interconnect planning and prediction to achieve joint. Besides, InteractionNet deploys another transformer to help the model pay extra attention to the perceived region containing critical or unseen vehicles. InteractionNet outperforms other baselines in several benchmarks, especially in terms of safety, which benefits from the joint consideration of planning and forecasting. The code will be available at https://github.com/fujiawei0724/InteractionNet.
Knowledge-based Recurrent Attentive Neural Network for Small Object Detection
May 02, 2018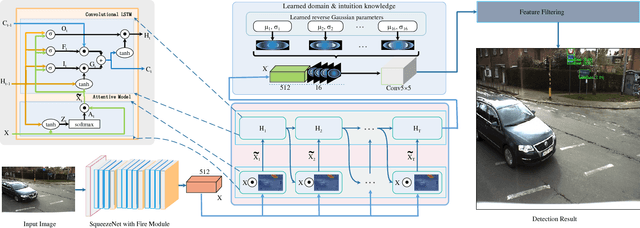


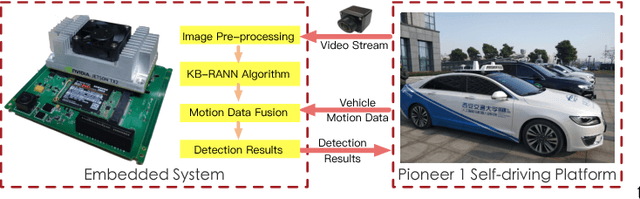
Accurate Traffic Sign Detection (TSD) can help intelligent systems make better decisions according to the traffic regulations. TSD, regarded as a typical small object detection problem in some way, is fundamental in Advanced Driver Assistance Systems (ADAS) and self-driving. However, although deep neural networks have achieved human even superhuman performance on several tasks, due to their own limitations, small object detection is still an open question. In this paper, we proposed a brain-inspired network, named as KB-RANN, to handle this problem. Attention mechanism is an essential function of our brain, we used a novel recurrent attentive neural network to improve the detection accuracy in a fine-grained manner. Further, we combined domain specific knowledge and intuitive knowledge to improve the efficiency. Experimental result shows that our methods achieved better performance than several popular methods widely used in object detection. More significantly, we transplanted our method on our designed embedded system and deployed on our self-driving car successfully.