 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractionNet: Joint Planning and Prediction for Autonomous Driving with Transformers
Paper and Code
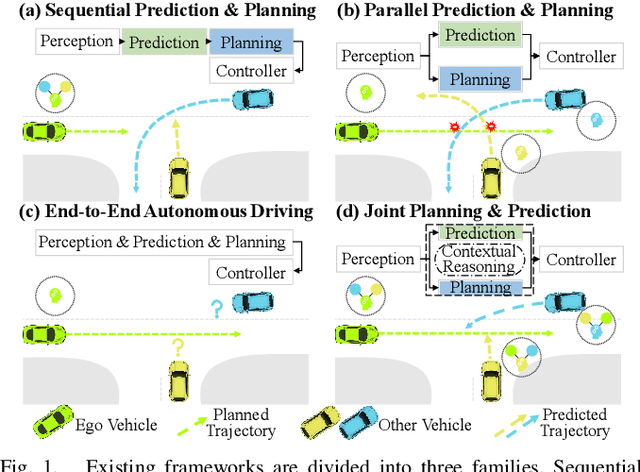
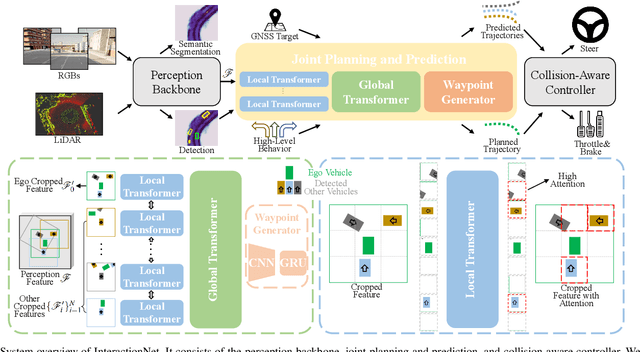
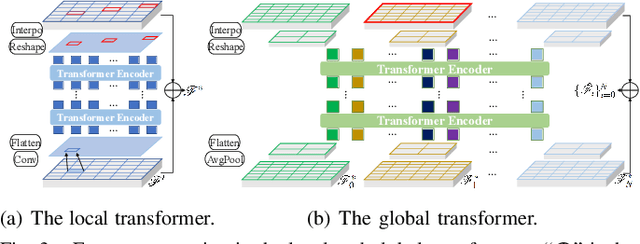

Planning and prediction are two important modules of autonomous driving and have experienced tremendous advancement recently. Nevertheless, most existing methods regard planning and prediction as independent and ignore the correlation between them, leading to the lack of consideration for interaction and dynamic changes of traffic scenarios. To address this challenge, we propose InteractionNet, which leverages transformer to share global contextual reasoning among all traffic participants to capture interaction and interconnect planning and prediction to achieve joint. Besides, InteractionNet deploys another transformer to help the model pay extra attention to the perceived region containing critical or unseen vehicles. InteractionNet outperforms other baselines in several benchmarks, especially in terms of safety, which benefits from the joint consideration of planning and forecasting. The code will be available at https://github.com/fujiawei0724/InteractionNet.