 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Spatio-Temporal Voxels Based Trajectory Planning for Autonomous Driving in Highway Traffic Flow
Paper and Code

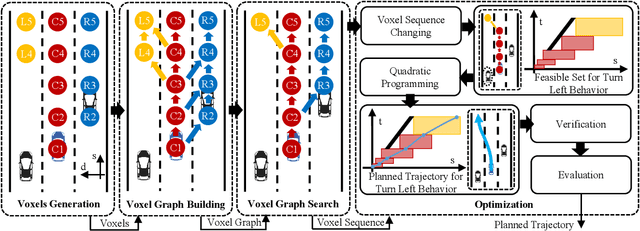
Trajectory planning is crucial for the safe driving of autonomous vehicles in highway traffic flow. Currently, some advanced trajectory planning methods utilize spatio-temporal voxels to construct feasible regions and then convert trajectory planning into optimization problem solving based on the feasible regions. However, these feasible region construction methods cannot adapt to the changes in dynamic environments, making them difficult to apply in complex traffic flow. In this paper, we propose a trajectory planning method based on adaptive spatio-temporal voxels which improves the construction of feasible regions and trajectory optimization while maintaining the quadratic programming form. The method can adjust feasible regions and trajectory planning according to real-time traffic flow and environmental changes, realizing vehicles to drive safely in complex traffic flow. The proposed method has been tested in both open-loop and closed-loop environments, and the test results show that our method outperforms the current planning methods.