 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Term Dynamic Window Approach for Kinodynamic Local Planning in Static and Crowd Environments
Oct 04, 2023



Local planning for a differential wheeled robot is designed to generate kinodynamic feasible actions that guide the robot to a goal position along the navigation path while avoiding obstacles. Reactive, predictive, and learning-based methods are widely used in local planning. However, few of them can fit static and crowd environments while satisfying kinodynamic constraints simultaneously. To solve this problem, we propose a novel local planning method. The method applies a long-term dynamic window approach to generate an initial trajectory and then optimizes it with graph optimization. The method can plan actions under the robot's kinodynamic constraints in real time while allowing the generated actions to be safer and more jitterless. Experimental results show that the proposed method adapts well to crowd and static environments and outperforms most SOTA approaches.
* 9 pages, 7 figures
Adaptive Spatio-Temporal Voxels Based Trajectory Planning for Autonomous Driving in Highway Traffic Flow
Oct 04, 2023
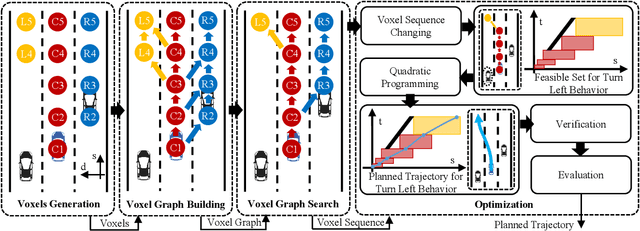
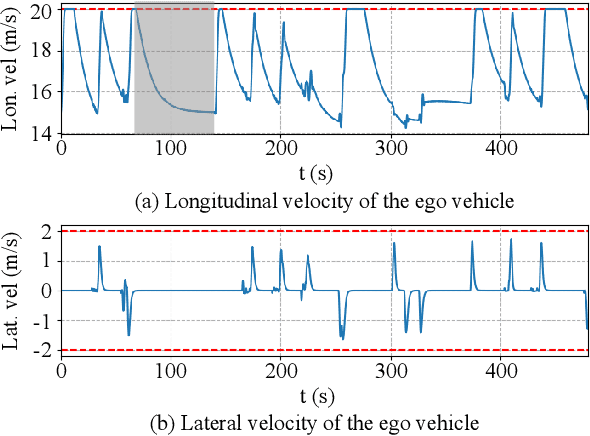
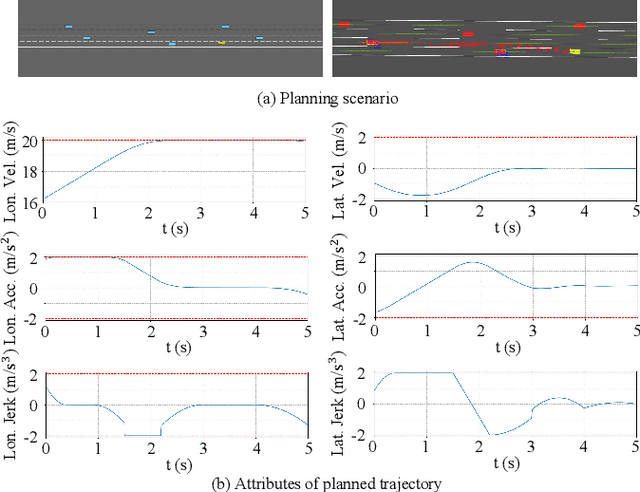
Trajectory planning is crucial for the safe driving of autonomous vehicles in highway traffic flow. Currently, some advanced trajectory planning methods utilize spatio-temporal voxels to construct feasible regions and then convert trajectory planning into optimization problem solving based on the feasible regions. However, these feasible region construction methods cannot adapt to the changes in dynamic environments, making them difficult to apply in complex traffic flow. In this paper, we propose a trajectory planning method based on adaptive spatio-temporal voxels which improves the construction of feasible regions and trajectory optimization while maintaining the quadratic programming form. The method can adjust feasible regions and trajectory planning according to real-time traffic flow and environmental changes, realizing vehicles to drive safely in complex traffic flow. The proposed method has been tested in both open-loop and closed-loop environments, and the test results show that our method outperforms the current planning methods.
* 8 pages, 5 figures
Brain Inspired Cognitive Model with Attention for Self-Driving Cars
Feb 18, 2017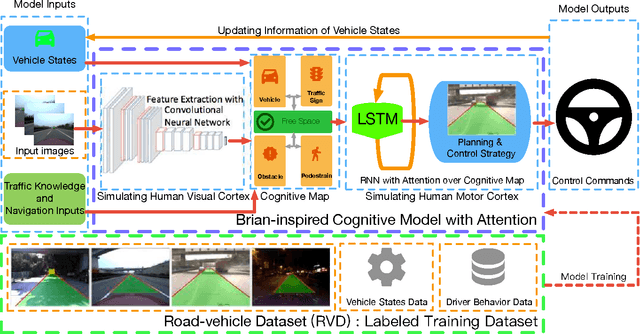
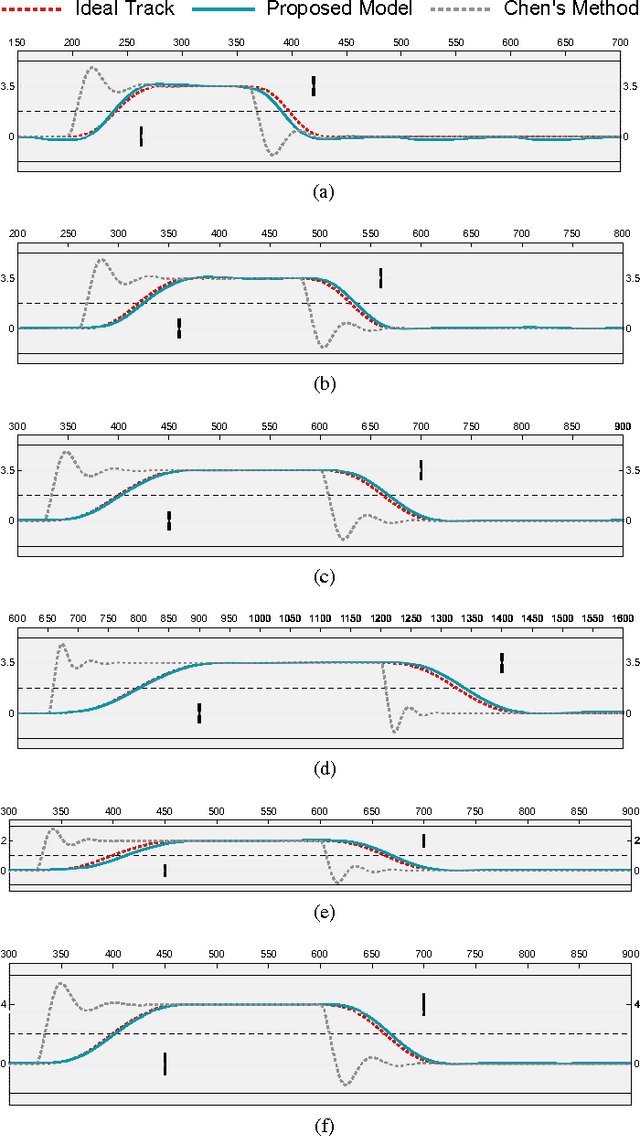
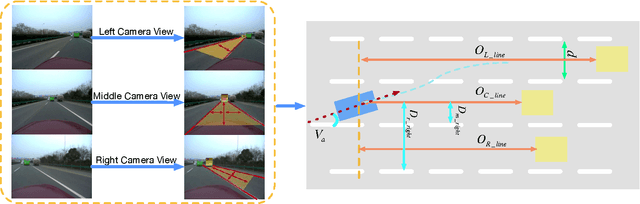
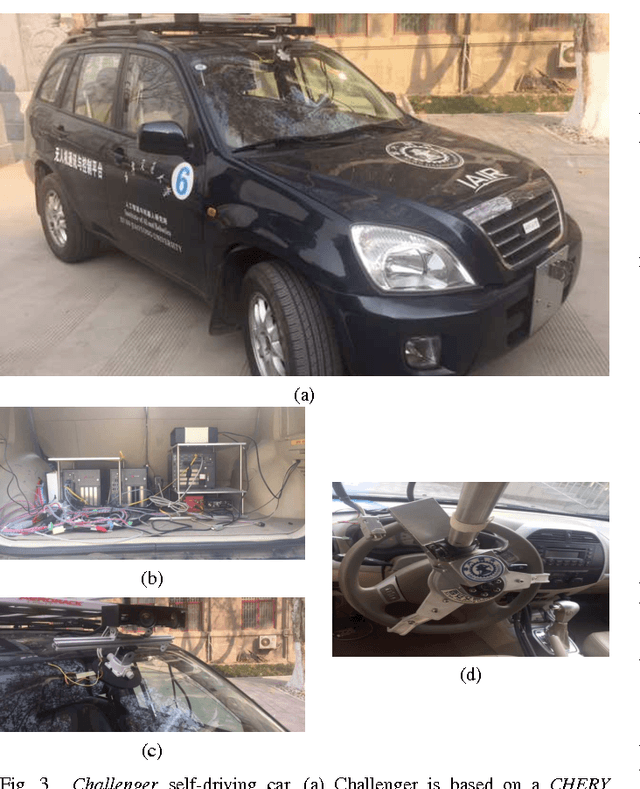
Perception-driven approach and end-to-end system are two major vision-based frameworks for self-driving cars. However, it is difficult to introduce attention and historical information of autonomous driving process, which are the essential factors for achieving human-like driving into these two methods. In this paper, we propose a novel model for self-driving cars named brain-inspired cognitive model with attention (CMA). This model consists of three parts: a convolutional neural network for simulating human visual cortex, a cognitive map built to describe relationships between objects in complex traffic scene and a recurrent neural network that combines with the real-time updated cognitive map to implement attention mechanism and long-short term memory. The benefit of our model is that can accurately solve three tasks simultaneously:1) detection of the free space and boundaries of the current and adjacent lanes. 2)estimation of obstacle distance and vehicle attitude, and 3) learning of driving behavior and decision making from human driver. More significantly, the proposed model could accept external navigating instructions during an end-to-end driving process. For evaluation, we build a large-scale road-vehicle dataset which contains more than forty thousand labeled road images captured by three cameras on our self-driving car. Moreover, human driving activities and vehicle states are recorded in the meanwhile.