 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrain Inspired Cognitive Model with Attention for Self-Driving Cars
Paper and Code
Feb 18, 2017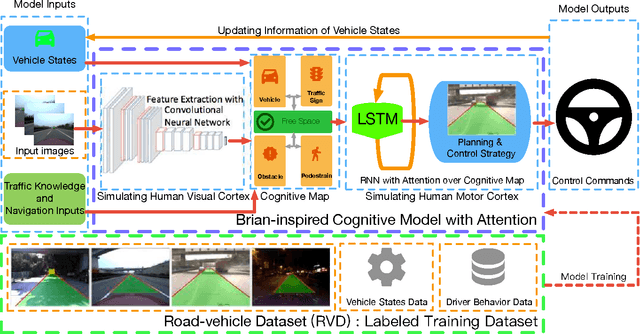
Perception-driven approach and end-to-end system are two major vision-based frameworks for self-driving cars. However, it is difficult to introduce attention and historical information of autonomous driving process, which are the essential factors for achieving human-like driving into these two methods. In this paper, we propose a novel model for self-driving cars named brain-inspired cognitive model with attention (CMA). This model consists of three parts: a convolutional neural network for simulating human visual cortex, a cognitive map built to describe relationships between objects in complex traffic scene and a recurrent neural network that combines with the real-time updated cognitive map to implement attention mechanism and long-short term memory. The benefit of our model is that can accurately solve three tasks simultaneously:1) detection of the free space and boundaries of the current and adjacent lanes. 2)estimation of obstacle distance and vehicle attitude, and 3) learning of driving behavior and decision making from human driver. More significantly, the proposed model could accept external navigating instructions during an end-to-end driving process. For evaluation, we build a large-scale road-vehicle dataset which contains more than forty thousand labeled road images captured by three cameras on our self-driving car. Moreover, human driving activities and vehicle states are recorded in the meanwhile.