 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCSST Strong Lensing Preparation: a Framework for Detecting Strong Lenses in the Multi-color Imaging Survey by the China Survey Space Telescope (CSST)
Apr 02, 2024Strong gravitational lensing is a powerful tool for investigating dark matter and dark energy properties. With the advent of large-scale sky surveys, we can discover strong lensing systems on an unprecedented scale, which requires efficient tools to extract them from billions of astronomical objects. The existing mainstream lens-finding tools are based on machine learning algorithms and applied to cut-out-centered galaxies. However, according to the design and survey strategy of optical surveys by CSST, preparing cutouts with multiple bands requires considerable efforts. To overcome these challenges, we have developed a framework based on a hierarchical visual Transformer with a sliding window technique to search for strong lensing systems within entire images. Moreover, given that multi-color images of strong lensing systems can provide insights into their physical characteristics, our framework is specifically crafted to identify strong lensing systems in images with any number of channels. As evaluated using CSST mock data based on an Semi-Analytic Model named CosmoDC2, our framework achieves precision and recall rates of 0.98 and 0.90, respectively. To evaluate the effectiveness of our method in real observations, we have applied it to a subset of images from the DESI Legacy Imaging Surveys and media images from Euclid Early Release Observations. 61 new strong lensing system candidates are discovered by our method. However, we also identified false positives arising primarily from the simplified galaxy morphology assumptions within the simulation. This underscores the practical limitations of our approach while simultaneously highlighting potential avenues for future improvements.
Local primordial non-Gaussianity from the large-scale clustering of photometric DESI luminous red galaxies
Jul 04, 2023We use angular clustering of luminous red galaxies from the Dark Energy Spectroscopic Instrument (DESI) imaging surveys to constrain the local primordial non-Gaussianity parameter fNL. Our sample comprises over 12 million targets, covering 14,000 square degrees of the sky, with redshifts in the range 0.2< z < 1.35. We identify Galactic extinction, survey depth, and astronomical seeing as the primary sources of systematic error, and employ linear regression and artificial neural networks to alleviate non-cosmological excess clustering on large scales. Our methods are tested against log-normal simulations with and without fNL and systematics, showing superior performance of the neural network treatment in reducing remaining systematics. Assuming the universality relation, we find fNL $= 47^{+14(+29)}_{-11(-22)}$ at 68\%(95\%) confidence. With a more aggressive treatment, including regression against the full set of imaging maps, our maximum likelihood value shifts slightly to fNL$ \sim 50$ and the uncertainty on fNL increases due to the removal of large-scale clustering information. We apply a series of robustness tests (e.g., cuts on imaging, declination, or scales used) that show consistency in the obtained constraints. Despite extensive efforts to mitigate systematics, our measurements indicate fNL > 0 with a 99.9 percent confidence level. This outcome raises concerns as it could be attributed to unforeseen systematics, including calibration errors or uncertainties associated with low-\ell systematics in the extinction template. Alternatively, it could suggest a scale-dependent fNL model--causing significant non-Gaussianity around large-scale structure while leaving cosmic microwave background scales unaffected. Our results encourage further studies of fNL with DESI spectroscopic samples, where the inclusion of 3D clustering modes should help separate imaging systematics.
WiFi based trajectory alignment, calibration and easy site survey using smart phones and foot-mounted IMUs
Jun 02, 2017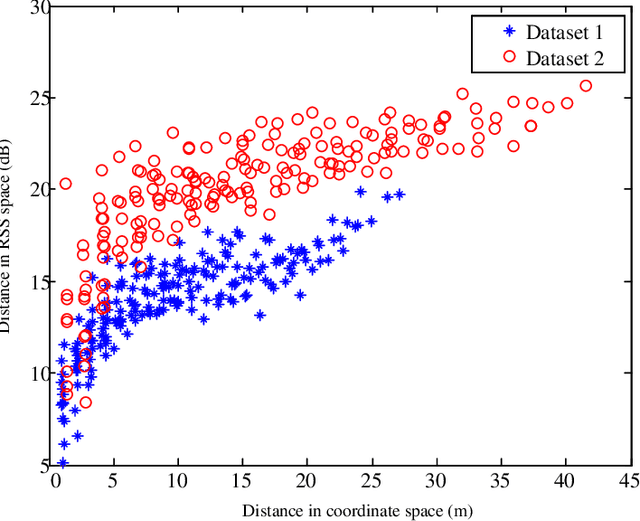
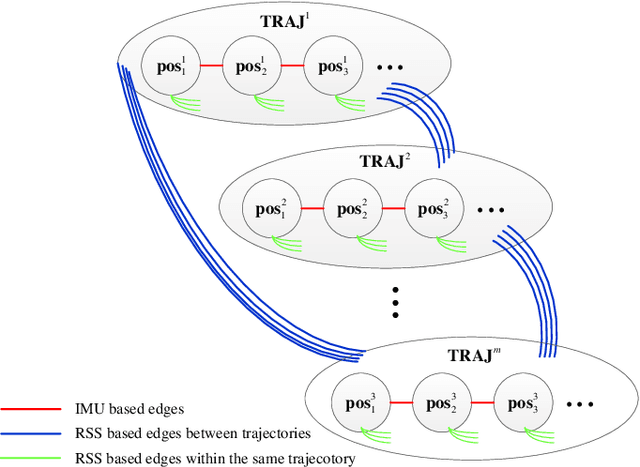
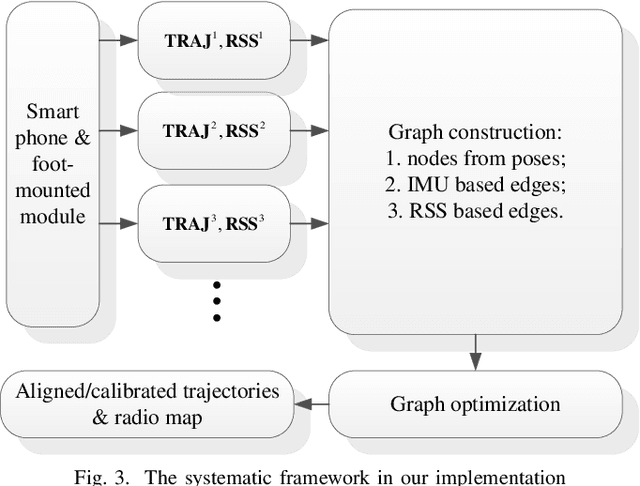
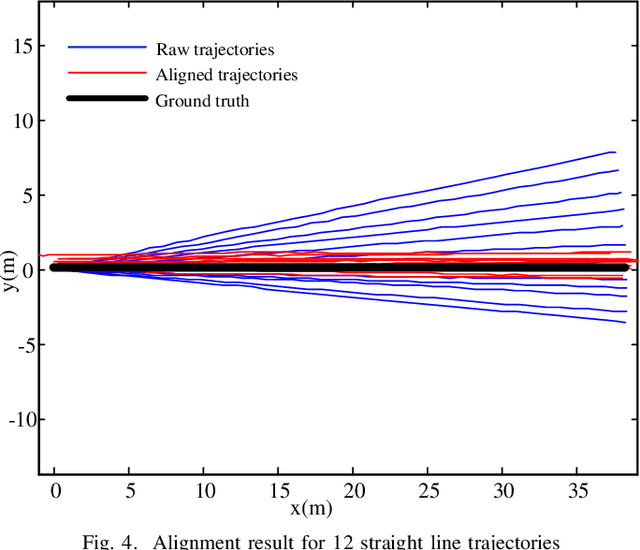
Foot-mounted inertial positioning (FMIP) can face problems of inertial drifts and unknown initial states in real applications, which renders the estimated trajectories inaccurate and not obtained in a well defined coordinate system for matching trajectories of different users. In this paper, an approach adopting received signal strength (RSS) measurements for Wifi access points (APs) are proposed to align and calibrate the trajectories estimated from foot mounted inertial measurement units (IMUs). A crowd-sourced radio map (RM) can be built subsequently and can be used for fingerprinting based Wifi indoor positioning (FWIP). The foundation of the proposed approach is graph based simultaneously localization and mapping (SLAM). The nodes in the graph denote users poses and the edges denote the pairwise constrains between the nodes. The constrains are derived from: (1) inertial estimated trajectories; (2) vicinity in the RSS space. With these constrains, an error functions is defined. By minimizing the error function, the graph is optimized and the aligned/calibrated trajectories along with the RM are acquired. The experimental results have corroborated the effectiveness of the approach for trajectory alignment, calibration as well as RM construction.