 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWiFi based trajectory alignment, calibration and easy site survey using smart phones and foot-mounted IMUs
Paper and Code
Jun 02, 2017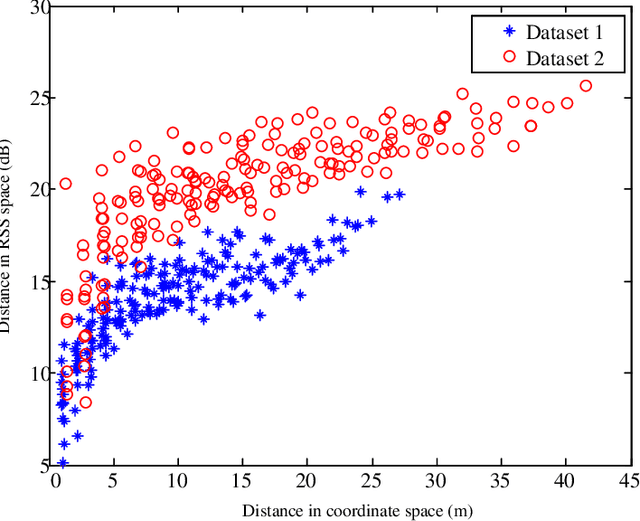
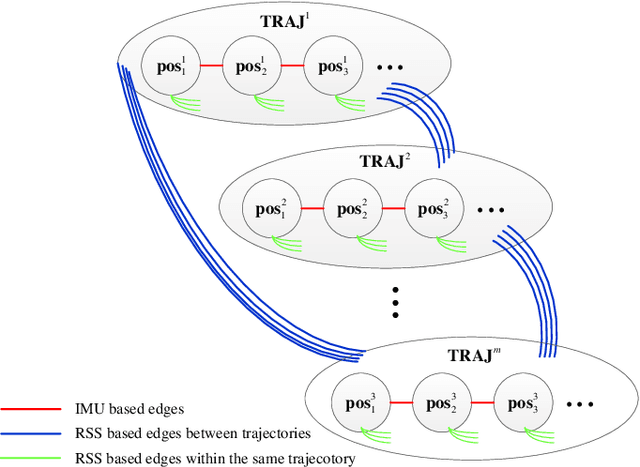
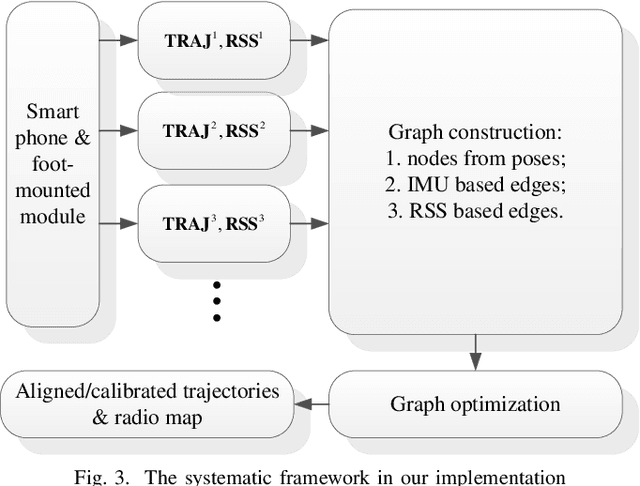
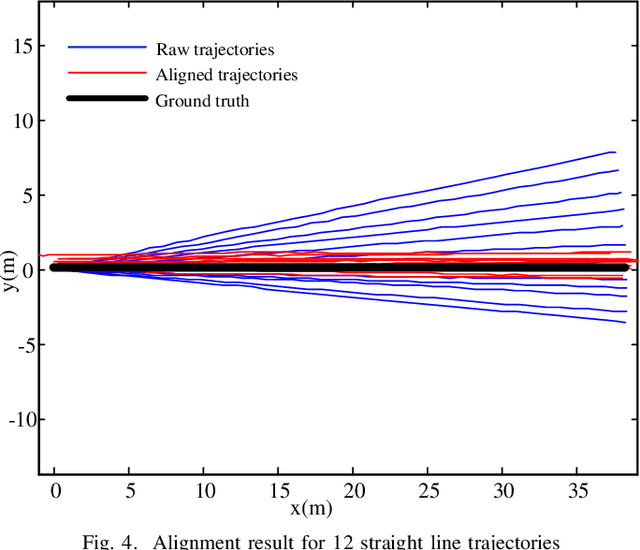
Foot-mounted inertial positioning (FMIP) can face problems of inertial drifts and unknown initial states in real applications, which renders the estimated trajectories inaccurate and not obtained in a well defined coordinate system for matching trajectories of different users. In this paper, an approach adopting received signal strength (RSS) measurements for Wifi access points (APs) are proposed to align and calibrate the trajectories estimated from foot mounted inertial measurement units (IMUs). A crowd-sourced radio map (RM) can be built subsequently and can be used for fingerprinting based Wifi indoor positioning (FWIP). The foundation of the proposed approach is graph based simultaneously localization and mapping (SLAM). The nodes in the graph denote users poses and the edges denote the pairwise constrains between the nodes. The constrains are derived from: (1) inertial estimated trajectories; (2) vicinity in the RSS space. With these constrains, an error functions is defined. By minimizing the error function, the graph is optimized and the aligned/calibrated trajectories along with the RM are acquired. The experimental results have corroborated the effectiveness of the approach for trajectory alignment, calibration as well as RM construction.