 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMiniMax-M1: Scaling Test-Time Compute Efficiently with Lightning Attention
Jun 16, 2025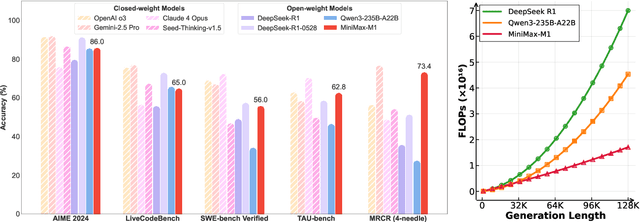

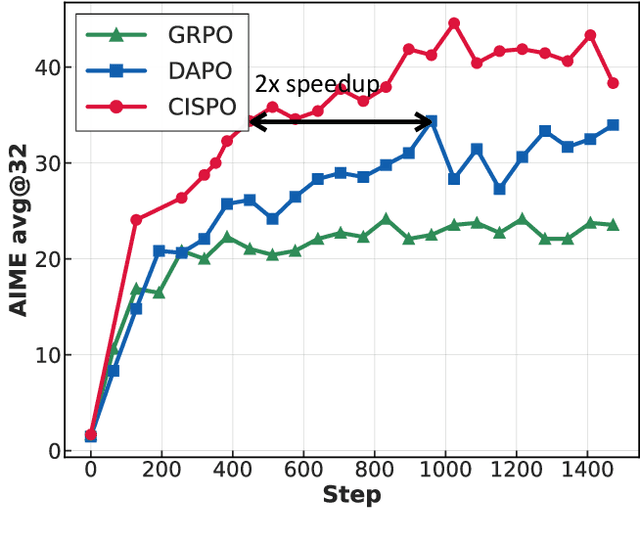
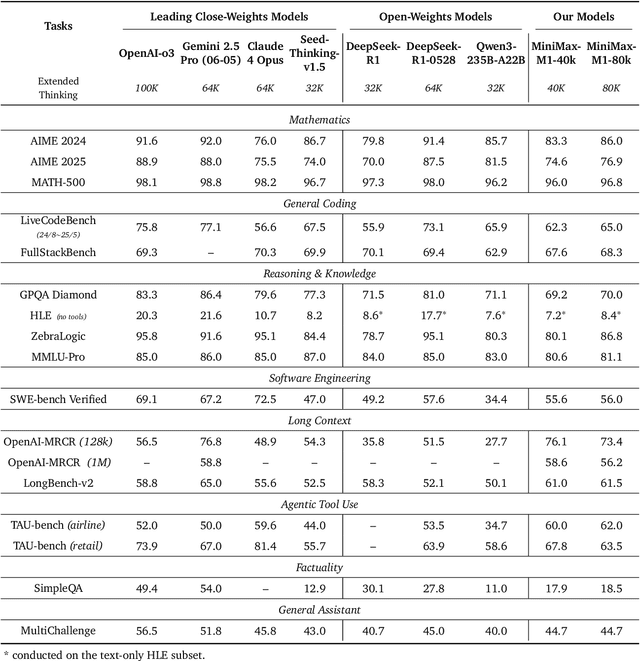
We introduce MiniMax-M1, the world's first open-weight, large-scale hybrid-attention reasoning model. MiniMax-M1 is powered by a hybrid Mixture-of-Experts (MoE) architecture combined with a lightning attention mechanism. The model is developed based on our previous MiniMax-Text-01 model, which contains a total of 456 billion parameters with 45.9 billion parameters activated per token. The M1 model natively supports a context length of 1 million tokens, 8x the context size of DeepSeek R1. Furthermore, the lightning attention mechanism in MiniMax-M1 enables efficient scaling of test-time compute. These properties make M1 particularly suitable for complex tasks that require processing long inputs and thinking extensively. MiniMax-M1 is trained using large-scale reinforcement learning (RL) on diverse problems including sandbox-based, real-world software engineering environments. In addition to M1's inherent efficiency advantage for RL training, we propose CISPO, a novel RL algorithm to further enhance RL efficiency. CISPO clips importance sampling weights rather than token updates, outperforming other competitive RL variants. Combining hybrid-attention and CISPO enables MiniMax-M1's full RL training on 512 H800 GPUs to complete in only three weeks, with a rental cost of just $534,700. We release two versions of MiniMax-M1 models with 40K and 80K thinking budgets respectively, where the 40K model represents an intermediate phase of the 80K training. Experiments on standard benchmarks show that our models are comparable or superior to strong open-weight models such as the original DeepSeek-R1 and Qwen3-235B, with particular strengths in complex software engineering, tool utilization, and long-context tasks. We publicly release MiniMax-M1 at https://github.com/MiniMax-AI/MiniMax-M1.
On the Identification of Temporally Causal Representation with Instantaneous Dependence
May 24, 2024


Temporally causal representation learning aims to identify the latent causal process from time series observations, but most methods require the assumption that the latent causal processes do not have instantaneous relations. Although some recent methods achieve identifiability in the instantaneous causality case, they require either interventions on the latent variables or grouping of the observations, which are in general difficult to obtain in real-world scenarios. To fill this gap, we propose an \textbf{ID}entification framework for instantane\textbf{O}us \textbf{L}atent dynamics (\textbf{IDOL}) by imposing a sparse influence constraint that the latent causal processes have sparse time-delayed and instantaneous relations. Specifically, we establish identifiability results of the latent causal process based on sufficient variability and the sparse influence constraint by employing contextual information of time series data. Based on these theories, we incorporate a temporally variational inference architecture to estimate the latent variables and a gradient-based sparsity regularization to identify the latent causal process. Experimental results on simulation datasets illustrate that our method can identify the latent causal process. Furthermore, evaluations on multiple human motion forecasting benchmarks with instantaneous dependencies indicate the effectiveness of our method in real-world settings.
Learning World Models with Identifiable Factorization
Jun 27, 2023



Extracting a stable and compact representation of the environment is crucial for efficient reinforcement learning in high-dimensional, noisy, and non-stationary environments. Different categories of information coexist in such environments -- how to effectively extract and disentangle these information remains a challenging problem. In this paper, we propose IFactor, a general framework to model four distinct categories of latent state variables that capture various aspects of information within the RL system, based on their interactions with actions and rewards. Our analysis establishes block-wise identifiability of these latent variables, which not only provides a stable and compact representation but also discloses that all reward-relevant factors are significant for policy learning. We further present a practical approach to learning the world model with identifiable blocks, ensuring the removal of redundants but retaining minimal and sufficient information for policy optimization. Experiments in synthetic worlds demonstrate that our method accurately identifies the ground-truth latent variables, substantiating our theoretical findings. Moreover, experiments in variants of the DeepMind Control Suite and RoboDesk showcase the superior performance of our approach over baselines.
Beware of Instantaneous Dependence in Reinforcement Learning
Mar 09, 2023Playing an important role in Model-Based Reinforcement Learning (MBRL), environment models aim to predict future states based on the past. Existing works usually ignore instantaneous dependence in the state, that is, assuming that the future state variables are conditionally independent given the past states. However, instantaneous dependence is prevalent in many RL environments. For instance, in the stock market, instantaneous dependence can exist between two stocks because the fluctuation of one stock can quickly affect the other and the resolution of price change is lower than that of the effect. In this paper, we prove that with few exceptions, ignoring instantaneous dependence can result in suboptimal policy learning in MBRL. To address the suboptimality problem, we propose a simple plug-and-play method to enable existing MBRL algorithms to take instantaneous dependence into account. Through experiments on two benchmarks, we (1) confirm the existence of instantaneous dependence with visualization; (2) validate our theoretical findings that ignoring instantaneous dependence leads to suboptimal policy; (3) verify that our method effectively enables reinforcement learning with instantaneous dependence and improves policy performance.