 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuron-Guided Interpretation of Code LLMs: Where, Why, and How?
Dec 23, 2025Code language models excel on code intelligence tasks, yet their internal interpretability is underexplored. Existing neuron interpretability techniques from NLP are suboptimal for source code due to programming languages formal, hierarchical, and executable nature. We empirically investigate code LLMs at the neuron level, localizing language-specific neurons (selectively responsive to one language) and concept layers (feed-forward layers encoding language-agnostic code representations). We analyze Llama-3.1-8B and Qwen2.5-Coder-32B on multilingual inputs in C++, Java, Python, Go, and JavaScript, measuring neuron selectivity and layerwise contributions during generation. We find (1) neurons specialized for individual languages alongside a universal subset supporting general-purpose generation; and (2) lower layers mainly encode language-specific syntax, while middle layers capture semantic abstractions shared across languages, emerging as concept layers. We demonstrate utility on three tasks: neuron-guided fine-tuning for code generation, clone detection via concept-layer embeddings, and concept-layer-guided transfer for code summarization, each yielding consistent gains in multilingual settings.
Anti-adversarial Learning: Desensitizing Prompts for Large Language Models
Apr 25, 2025



With the widespread use of LLMs, preserving privacy in user prompts has become crucial, as prompts risk exposing privacy and sensitive data to the cloud LLMs. Traditional techniques like homomorphic encryption, secure multi-party computation, and federated learning face challenges due to heavy computational costs and user participation requirements, limiting their applicability in LLM scenarios. In this paper, we propose PromptObfus, a novel method for desensitizing LLM prompts. The core idea of PromptObfus is "anti-adversarial" learning, which perturbs privacy words in the prompt to obscure sensitive information while retaining the stability of model predictions. Specifically, PromptObfus frames prompt desensitization as a masked language modeling task, replacing privacy-sensitive terms with a [MASK] token. A desensitization model is trained to generate candidate replacements for each masked position. These candidates are subsequently selected based on gradient feedback from a surrogate model, ensuring minimal disruption to the task output. We demonstrate the effectiveness of our approach on three NLP tasks. Results show that PromptObfus effectively prevents privacy inference from remote LLMs while preserving task performance.
PanoVPR: Towards Unified Perspective-to-Equirectangular Visual Place Recognition via Sliding Windows across the Panoramic View
Mar 24, 2023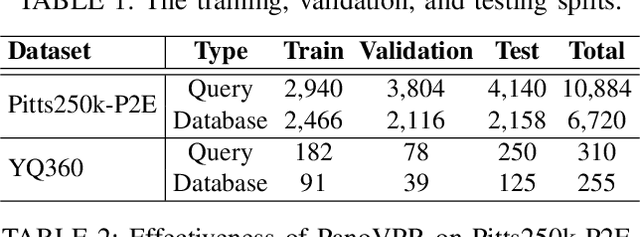
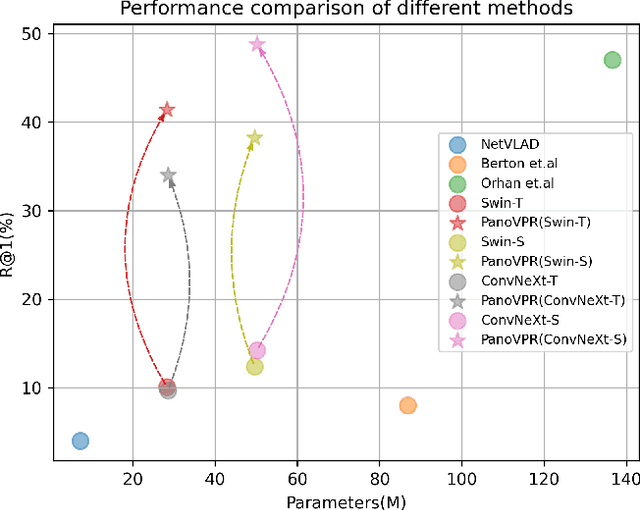
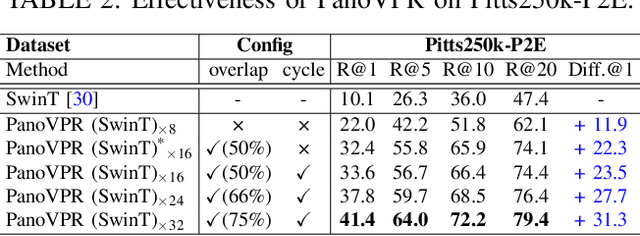
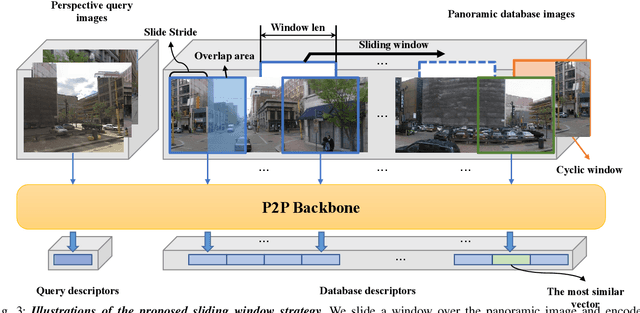
Visual place recognition has received increasing attention in recent years as a key technology in autonomous driving and robotics. The current mainstream approaches use either the perspective view retrieval perspective view (P2P) paradigm or the equirectangular image retrieval equirectangular image (E2E) paradigm. However, a natural and practical idea is that users only have consumer-grade pinhole cameras to obtain query perspective images and retrieve them in panoramic database images from map providers. To this end, we propose PanoVPR, a sliding-window-based perspective-to-equirectangular (P2E) visual place recognition framework, which eliminates feature truncation caused by hard cropping by sliding windows over the whole equirectangular image and computing and comparing feature descriptors between windows. In addition, this unified framework allows for directly transferring the network structure used in perspective-to-perspective (P2P) methods without modification. To facilitate training and evaluation, we derive the pitts250k-P2E dataset from the pitts250k and achieve promising results, and we also establish a P2E dataset in a real-world scenario by a mobile robot platform, which we refer to YQ360. Code and datasets will be made available at https://github.com/zafirshi/PanoVPR.
PanoFlow: Learning Optical Flow for Panoramic Images
Feb 27, 2022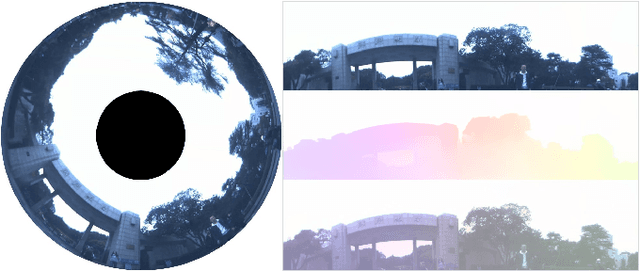
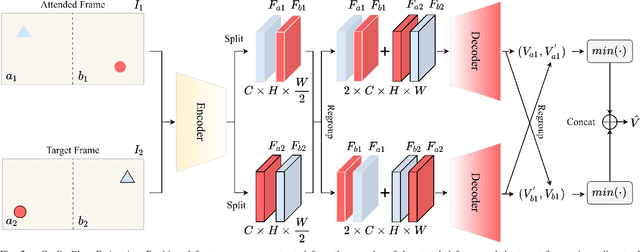
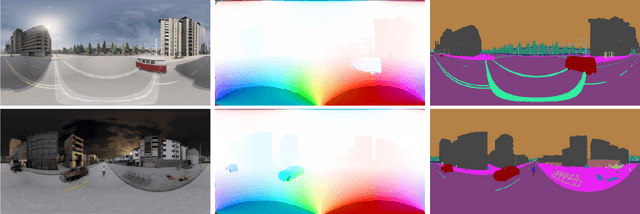
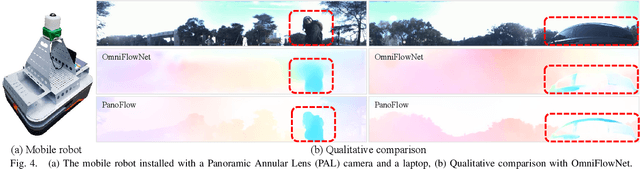
Optical flow estimation is a basic task in self-driving and robotics systems, which enables to temporally interpret the traffic scene. Autonomous vehicles clearly benefit from the ultra-wide Field of View (FoV) offered by 360-degree panoramic sensors. However, due to the unique imaging process of panoramic images, models designed for pinhole images do not directly generalize satisfactorily to 360-degree panoramic images. In this paper, we put forward a novel network framework--PanoFlow, to learn optical flow for panoramic images. To overcome the distortions introduced by equirectangular projection in panoramic transformation, we design a Flow Distortion Augmentation (FDA) method. We further propose a Cyclic Flow Estimation (CFE) method by leveraging the cyclicity of spherical images to infer 360-degree optical flow and converting large displacement to relatively small displacement. PanoFlow is applicable to any existing flow estimation method and benefit from the progress of narrow-FoV flow estimation. In addition, we create and release a synthetic panoramic dataset Flow360 based on CARLA to facilitate training and quantitative analysis. PanoFlow achieves state-of-the-art performance. Our proposed approach reduces the End-Point-Error (EPE) on the established Flow360 dataset by 26%. On the public OmniFlowNet dataset, PanoFlow achieves an EPE of 3.34 pixels, a 53.1% error reduction from the best published result (7.12 pixels). We also validate our method via an outdoor collection vehicle, indicating strong potential and robustness for real-world navigation applications. Code and dataset are publicly available at https://github.com/MasterHow/PanoFlow.