 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Curriculum-inspired Adaptive Direct Policy Guidance for Truck Dispatching
Feb 28, 2025



Efficient truck dispatching via Reinforcement Learning (RL) in open-pit mining is often hindered by reliance on complex reward engineering and value-based methods. This paper introduces Curriculum-inspired Adaptive Direct Policy Guidance, a novel curriculum learning strategy for policy-based RL to address these issues. We adapt Proximal Policy Optimization (PPO) for mine dispatching's uneven decision intervals using time deltas in Temporal Difference and Generalized Advantage Estimation, and employ a Shortest Processing Time teacher policy for guided exploration via policy regularization and adaptive guidance. Evaluations in OpenMines demonstrate our approach yields a 10% performance gain and faster convergence over standard PPO across sparse and dense reward settings, showcasing improved robustness to reward design. This direct policy guidance method provides a general and effective curriculum learning technique for RL-based truck dispatching, enabling future work on advanced architectures.
PanoFlow: Learning Optical Flow for Panoramic Images
Feb 27, 2022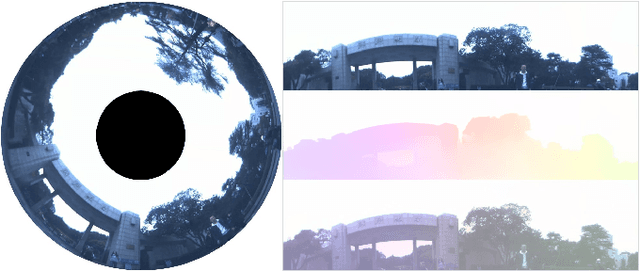
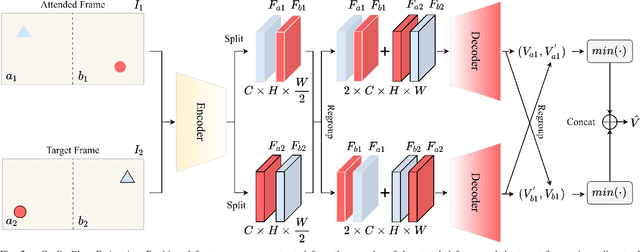
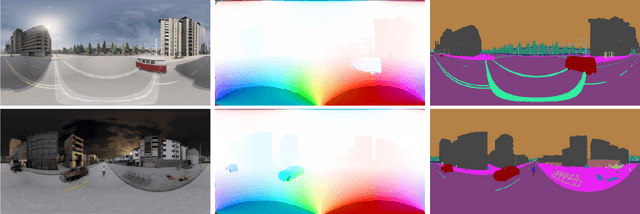
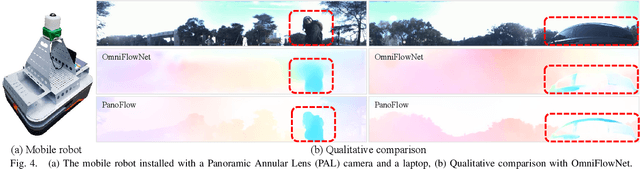
Optical flow estimation is a basic task in self-driving and robotics systems, which enables to temporally interpret the traffic scene. Autonomous vehicles clearly benefit from the ultra-wide Field of View (FoV) offered by 360-degree panoramic sensors. However, due to the unique imaging process of panoramic images, models designed for pinhole images do not directly generalize satisfactorily to 360-degree panoramic images. In this paper, we put forward a novel network framework--PanoFlow, to learn optical flow for panoramic images. To overcome the distortions introduced by equirectangular projection in panoramic transformation, we design a Flow Distortion Augmentation (FDA) method. We further propose a Cyclic Flow Estimation (CFE) method by leveraging the cyclicity of spherical images to infer 360-degree optical flow and converting large displacement to relatively small displacement. PanoFlow is applicable to any existing flow estimation method and benefit from the progress of narrow-FoV flow estimation. In addition, we create and release a synthetic panoramic dataset Flow360 based on CARLA to facilitate training and quantitative analysis. PanoFlow achieves state-of-the-art performance. Our proposed approach reduces the End-Point-Error (EPE) on the established Flow360 dataset by 26%. On the public OmniFlowNet dataset, PanoFlow achieves an EPE of 3.34 pixels, a 53.1% error reduction from the best published result (7.12 pixels). We also validate our method via an outdoor collection vehicle, indicating strong potential and robustness for real-world navigation applications. Code and dataset are publicly available at https://github.com/MasterHow/PanoFlow.