 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProjecting Points to Axes: Oriented Object Detection via Point-Axis Representation
Jul 11, 2024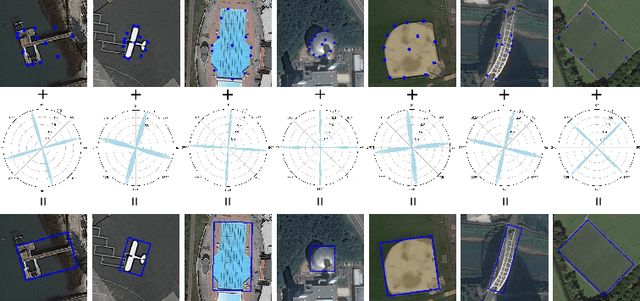

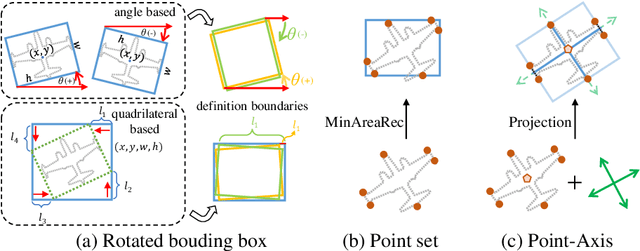
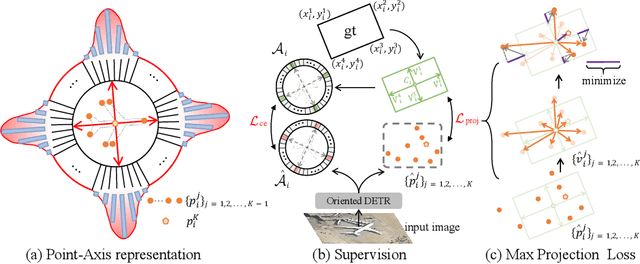
This paper introduces the point-axis representation for oriented object detection, emphasizing its flexibility and geometrically intuitive nature with two key components: points and axes. 1) Points delineate the spatial extent and contours of objects, providing detailed shape descriptions. 2) Axes define the primary directionalities of objects, providing essential orientation cues crucial for precise detection. The point-axis representation decouples location and rotation, addressing the loss discontinuity issues commonly encountered in traditional bounding box-based approaches. For effective optimization without introducing additional annotations, we propose the max-projection loss to supervise point set learning and the cross-axis loss for robust axis representation learning. Further, leveraging this representation, we present the Oriented DETR model, seamlessly integrating the DETR framework for precise point-axis prediction and end-to-end detection. Experimental results demonstrate significant performance improvements in oriented object detection tasks.
ARTrackV2: Prompting Autoregressive Tracker Where to Look and How to Describe
Dec 29, 2023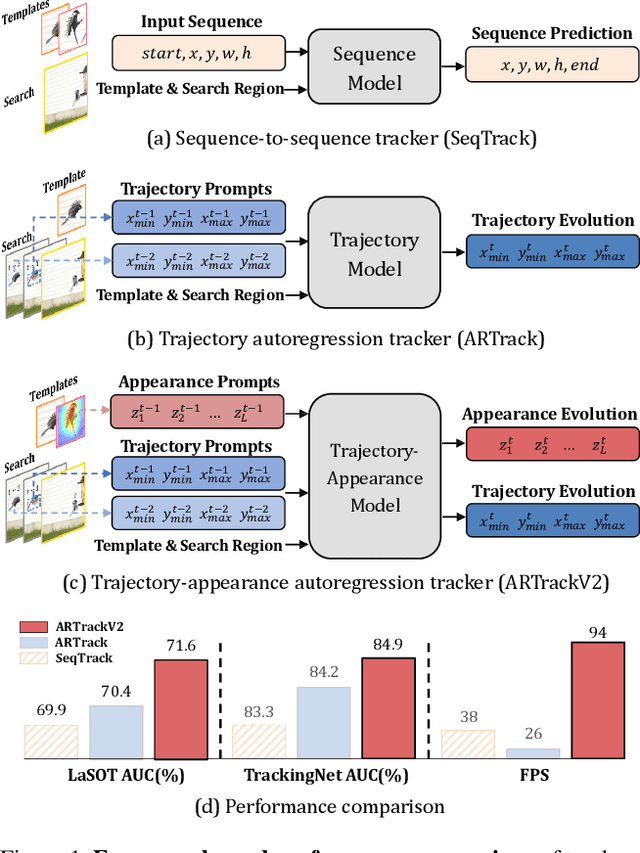
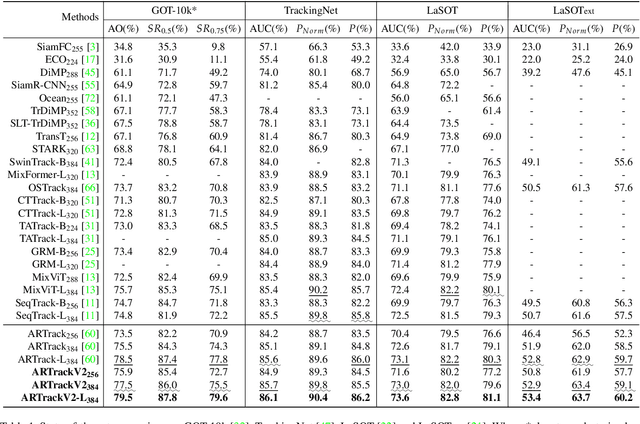
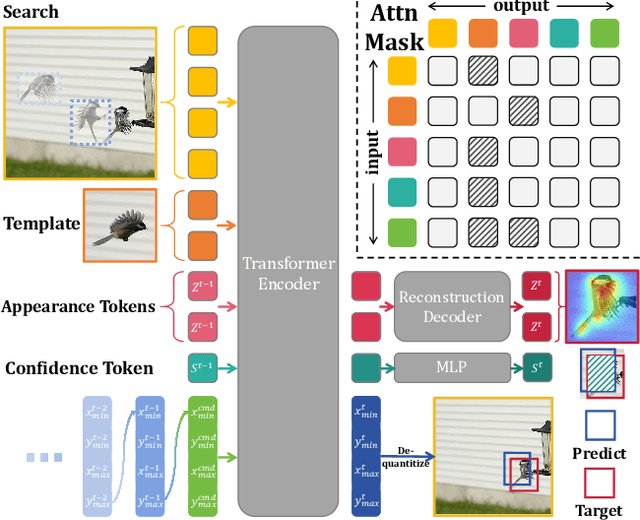
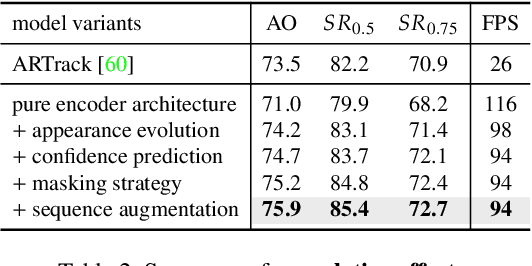
We present ARTrackV2, which integrates two pivotal aspects of tracking: determining where to look (localization) and how to describe (appearance analysis) the target object across video frames. Building on the foundation of its predecessor, ARTrackV2 extends the concept by introducing a unified generative framework to "read out" object's trajectory and "retell" its appearance in an autoregressive manner. This approach fosters a time-continuous methodology that models the joint evolution of motion and visual features, guided by previous estimates. Furthermore, ARTrackV2 stands out for its efficiency and simplicity, obviating the less efficient intra-frame autoregression and hand-tuned parameters for appearance updates. Despite its simplicity, ARTrackV2 achieves state-of-the-art performance on prevailing benchmark datasets while demonstrating remarkable efficiency improvement. In particular, ARTrackV2 achieves AO score of 79.5\% on GOT-10k, and AUC of 86.1\% on TrackingNet while being $3.6 \times$ faster than ARTrack. The code will be released.
PlanE: Representation Learning over Planar Graphs
Jul 03, 2023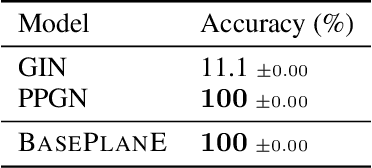
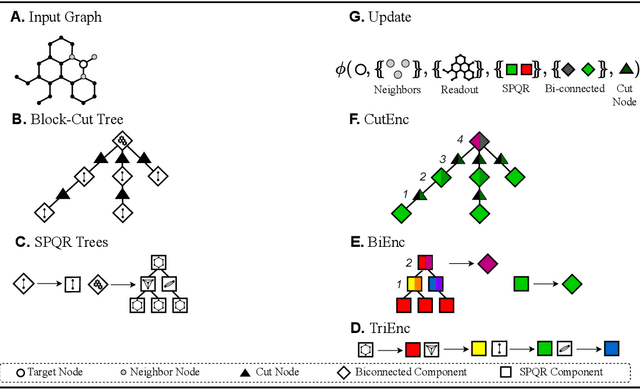
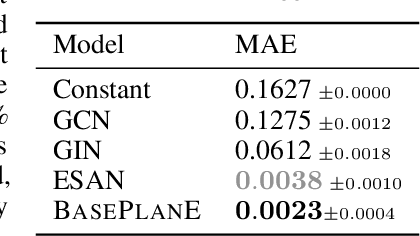
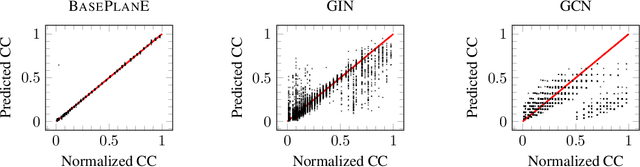
Graph neural networks are prominent models for representation learning over graphs, where the idea is to iteratively compute representations of nodes of an input graph through a series of transformations in such a way that the learned graph function is isomorphism invariant on graphs, which makes the learned representations graph invariants. On the other hand, it is well-known that graph invariants learned by these class of models are incomplete: there are pairs of non-isomorphic graphs which cannot be distinguished by standard graph neural networks. This is unsurprising given the computational difficulty of graph isomorphism testing on general graphs, but the situation begs to differ for special graph classes, for which efficient graph isomorphism testing algorithms are known, such as planar graphs. The goal of this work is to design architectures for efficiently learning complete invariants of planar graphs. Inspired by the classical planar graph isomorphism algorithm of Hopcroft and Tarjan, we propose PlanE as a framework for planar representation learning. PlanE includes architectures which can learn complete invariants over planar graphs while remaining practically scalable. We empirically validate the strong performance of the resulting model architectures on well-known planar graph benchmarks, achieving multiple state-of-the-art results.
Revolutionizing Agrifood Systems with Artificial Intelligence: A Survey
May 03, 2023



With the world population rapidly increasing, transforming our agrifood systems to be more productive, efficient, safe, and sustainable is crucial to mitigate potential food shortages. Recently, artificial intelligence (AI) techniques such as deep learning (DL) have demonstrated their strong abilities in various areas, including language, vision, remote sensing (RS), and agrifood systems applications. However, the overall impact of AI on agrifood systems remains unclear. In this paper, we thoroughly review how AI techniques can transform agrifood systems and contribute to the modern agrifood industry. Firstly, we summarize the data acquisition methods in agrifood systems, including acquisition, storage, and processing techniques. Secondly, we present a progress review of AI methods in agrifood systems, specifically in agriculture, animal husbandry, and fishery, covering topics such as agrifood classification, growth monitoring, yield prediction, and quality assessment. Furthermore, we highlight potential challenges and promising research opportunities for transforming modern agrifood systems with AI. We hope this survey could offer an overall picture to newcomers in the field and serve as a starting point for their further research.