 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGust Estimation and Rejection with a Disturbance Observer for Proprioceptive Underwater Soft Morphing Wings
Feb 04, 2026Unmanned underwater vehicles are increasingly employed for maintenance and surveying tasks at sea, but their operation in shallow waters is often hindered by hydrodynamic disturbances such as waves, currents, and turbulence. These unsteady flows can induce rapid changes in direction and speed, compromising vehicle stability and manoeuvrability. Marine organisms contend with such conditions by combining proprioceptive feedback with flexible fins and tails to reject disturbances. Inspired by this strategy, we propose soft morphing wings endowed with proprioceptive sensing to mitigate environmental perturbations. The wing's continuous deformation provides a natural means to infer dynamic disturbances: sudden changes in camber directly reflect variations in the oncoming flow. By interpreting this proprioceptive signal, a disturbance observer can reconstruct flow parameters in real time. To enable this, we develop and experimentally validate a dynamic model of a hydraulically actuated soft wing with controllable camber. We then show that curvature-based sensing allows accurate estimation of disturbances in the angle of attack. Finally, we demonstrate that a controller leveraging these proprioceptive estimates can reject disturbances in the lift response of the soft wing. By combining proprioceptive sensing with a disturbance observer, this technique mirrors biological strategies and provides a pathway for soft underwater vehicles to maintain stability in hazardous environments.
Computing forward statics from tendon-length in flexible-joint hyper-redundant manipulators
Sep 15, 2025Hyper-redundant tendon-driven manipulators offer greater flexibility and compliance over traditional manipulators. A common way of controlling such manipulators relies on adjusting tendon lengths, which is an accessible control parameter. This approach works well when the kinematic configuration is representative of the real operational conditions. However, when dealing with manipulators of larger size subject to gravity, it becomes necessary to solve a static force problem, using tendon force as the input and employing a mapping from the configuration space to retrieve tendon length. Alternatively, measurements of the manipulator posture can be used to iteratively adjust tendon lengths to achieve a desired posture. Hence, either tension measurement or state estimation of the manipulator are required, both of which are not always accurately available. Here, we propose a solution by reconciling cables tension and length as the input for the solution of the system forward statics. We develop a screw-based formulation for a tendon-driven, multi-segment, hyper-redundant manipulator with elastic joints and introduce a forward statics iterative solution method that equivalently makes use of either tendon length or tension as the input. This strategy is experimentally validated using a traditional tension input first, subsequently showing the efficacy of the method when exclusively tendon lengths are used. The results confirm the possibility to perform open-loop control in static conditions using a kinematic input only, thus bypassing some of the practical problems with tension measurement and state estimation of hyper-redundant systems.
Optimized Lattice-Structured Flexible EIT Sensor for Tactile Reconstruction and Classification
Apr 30, 2025Flexible electrical impedance tomography (EIT) offers a promising alternative to traditional tactile sensing approaches, enabling low-cost, scalable, and deformable sensor designs. Here, we propose an optimized lattice-structured flexible EIT tactile sensor incorporating a hydrogel-based conductive layer, systematically designed through three-dimensional coupling field simulations to optimize structural parameters for enhanced sensitivity and robustness. By tuning the lattice channel width and conductive layer thickness, we achieve significant improvements in tactile reconstruction quality and classification performance. Experimental results demonstrate high-quality tactile reconstruction with correlation coefficients up to 0.9275, peak signal-to-noise ratios reaching 29.0303 dB, and structural similarity indexes up to 0.9660, while maintaining low relative errors down to 0.3798. Furthermore, the optimized sensor accurately classifies 12 distinct tactile stimuli with an accuracy reaching 99.6%. These results highlight the potential of simulation-guided structural optimization for advancing flexible EIT-based tactile sensors toward practical applications in wearable systems, robotics, and human-machine interfaces.
Learning-enhanced electronic skin for tactile sensing on deformable surface based on electrical impedance tomography
Apr 08, 2025Electrical Impedance Tomography (EIT)-based tactile sensors offer cost-effective and scalable solutions for robotic sensing, especially promising for soft robots. However a major issue of EIT-based tactile sensors when applied in highly deformable objects is their performance degradation due to surface deformations. This limitation stems from their inherent sensitivity to strain, which is particularly exacerbated in soft bodies, thus requiring dedicated data interpretation to disentangle the parameter being measured and the signal deriving from shape changes. This has largely limited their practical implementations. This paper presents a machine learning-assisted tactile sensing approach to address this challenge by tracking surface deformations and segregating this contribution in the signal readout during tactile sensing. We first capture the deformations of the target object, followed by tactile reconstruction using a deep learning model specifically designed to process and fuse EIT data and deformation information. Validations using numerical simulations achieved high correlation coefficients (0.9660 - 0.9999), peak signal-to-noise ratios (28.7221 - 55.5264 dB) and low relative image errors (0.0107 - 0.0805). Experimental validations, using a hydrogel-based EIT e-skin under various deformation scenarios, further demonstrated the effectiveness of the proposed approach in real-world settings. The findings could underpin enhanced tactile interaction in soft and highly deformable robotic applications.
Modular Soft Wearable Glove for Real-Time Gesture Recognition and Dynamic 3D Shape Reconstruction
Apr 08, 2025With the increasing demand for human-computer interaction (HCI), flexible wearable gloves have emerged as a promising solution in virtual reality, medical rehabilitation, and industrial automation. However, the current technology still has problems like insufficient sensitivity and limited durability, which hinder its wide application. This paper presents a highly sensitive, modular, and flexible capacitive sensor based on line-shaped electrodes and liquid metal (EGaIn), integrated into a sensor module tailored to the human hand's anatomy. The proposed system independently captures bending information from each finger joint, while additional measurements between adjacent fingers enable the recording of subtle variations in inter-finger spacing. This design enables accurate gesture recognition and dynamic hand morphological reconstruction of complex movements using point clouds. Experimental results demonstrate that our classifier based on Convolution Neural Network (CNN) and Multilayer Perceptron (MLP) achieves an accuracy of 99.15% across 30 gestures. Meanwhile, a transformer-based Deep Neural Network (DNN) accurately reconstructs dynamic hand shapes with an Average Distance (AD) of 2.076\pm3.231 mm, with the reconstruction accuracy at individual key points surpassing SOTA benchmarks by 9.7% to 64.9%. The proposed glove shows excellent accuracy, robustness and scalability in gesture recognition and hand reconstruction, making it a promising solution for next-generation HCI systems.
Flexible electrical impedance tomography for tactile interfaces
Nov 20, 2024



Flexible electrical impedance tomography (EIT) is an emerging technology for tactile sensing in human-machine interfaces (HMI). It offers a unique alternative to traditional array-based tactile sensors with its flexible, scalable, and cost-effective one-piece design. This paper proposes a lattice-patterned flexible EIT tactile sensor with a hydrogel-based conductive layer, designed for enhanced sensitivity while maintaining durability. We conducted simulation studies to explore the influence of lattice width and conductive layer thickness on sensor performance, establishing optimized sensor design parameters for enhanced functionality. Experimental evaluations demonstrate the sensor's capacity to detect diverse tactile patterns with a high accuracy. The practical utility of the sensor is demonstrated through its integration within an HMI setup to control a virtual game, showcasing its potential for dynamic, multi-functional tactile interactions in real-time applications. This study reinforces the potential of EIT-based flexible tactile sensors, establishing a foundation for future advancements in wearable, adaptable HMI technologies.
Data-efficient Tactile Sensing with Electrical Impedance Tomography
Nov 19, 2024



Electrical Impedance Tomography (EIT)-inspired tactile sensors are gaining attention in robotic tactile sensing due to their cost-effectiveness, safety, and scalability with sparse electrode configurations. This paper presents a data augmentation strategy for learning-based tactile reconstruction that amplifies the original single-frame signal measurement into 32 distinct, effective signal data for training. This approach supplements uncollected conditions of position information, resulting in more accurate and high-resolution tactile reconstructions. Data augmentation for EIT significantly reduces the required EIT measurements and achieves promising performance with even limited samples. Simulation results show that the proposed method improves the correlation coefficient by over 12% and reduces the relative error by over 21% under various noise levels. Furthermore, we demonstrate that a standard deep neural network (DNN) utilizing the proposed data augmentation reduces the required data down to 1/31 while achieving a similar tactile reconstruction quality. Real-world tests further validate the approach's effectiveness on a flexible EIT-based tactile sensor. These results could help address the challenge of training tactile sensing networks with limited available measurements, improving the accuracy and applicability of EIT-based tactile sensing systems.
Multi-frequency Electrical Impedance Tomography Reconstruction with Multi-Branch Attention Image Prior
Sep 17, 2024


Multi-frequency Electrical Impedance Tomography (mfEIT) is a promising biomedical imaging technique that estimates tissue conductivities across different frequencies. Current state-of-the-art (SOTA) algorithms, which rely on supervised learning and Multiple Measurement Vectors (MMV), require extensive training data, making them time-consuming, costly, and less practical for widespread applications. Moreover, the dependency on training data in supervised MMV methods can introduce erroneous conductivity contrasts across frequencies, posing significant concerns in biomedical applications. To address these challenges, we propose a novel unsupervised learning approach based on Multi-Branch Attention Image Prior (MAIP) for mfEIT reconstruction. Our method employs a carefully designed Multi-Branch Attention Network (MBA-Net) to represent multiple frequency-dependent conductivity images and simultaneously reconstructs mfEIT images by iteratively updating its parameters. By leveraging the implicit regularization capability of the MBA-Net, our algorithm can capture significant inter- and intra-frequency correlations, enabling robust mfEIT reconstruction without the need for training data. Through simulation and real-world experiments, our approach demonstrates performance comparable to, or better than, SOTA algorithms while exhibiting superior generalization capability. These results suggest that the MAIP-based method can be used to improve the reliability and applicability of mfEIT in various settings.
Closed-loop underwater soft robotic foil shape control using flexible e-skin
Aug 02, 2024



The use of soft robotics for real-world underwater applications is limited, even more than in terrestrial applications, by the ability to accurately measure and control the deformation of the soft materials in real time without the need for feedback from an external sensor. Real-time underwater shape estimation would allow for accurate closed-loop control of soft propulsors, enabling high-performance swimming and manoeuvring. We propose and demonstrate a method for closed-loop underwater soft robotic foil control based on a flexible capacitive e-skin and machine learning which does not necessitate feedback from an external sensor. The underwater e-skin is applied to a highly flexible foil undergoing deformations from 2% to 9% of its camber by means of soft hydraulic actuators. Accurate set point regulation of the camber is successfully tracked during sinusoidal and triangle actuation routines with an amplitude of 5% peak-to-peak and 10-second period with a normalised RMS error of 0.11, and 2% peak-to-peak amplitude with a period of 5 seconds with a normalised RMS error of 0.03. The tail tip deflection can be measured across a 30 mm (0.15 chords) range. These results pave the way for using e-skin technology for underwater soft robotic closed-loop control applications.
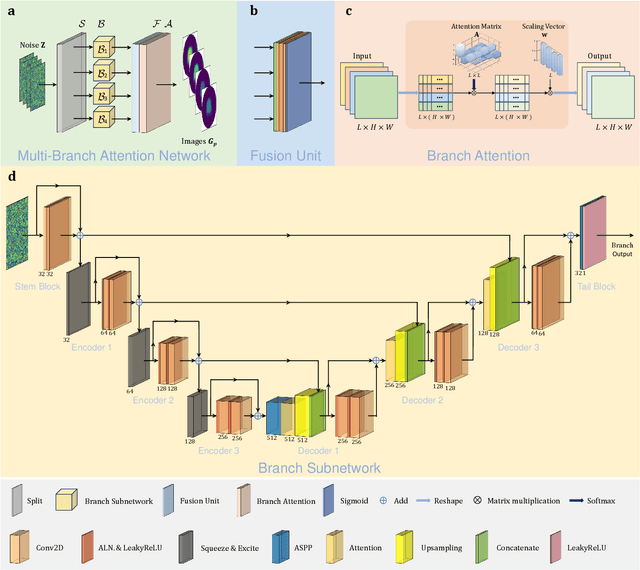
Generative deep learning-enabled ultra-large field-of-view lens-free imaging
Mar 15, 2024
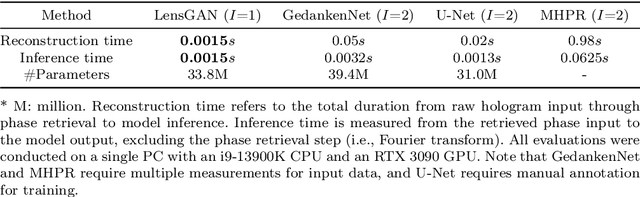

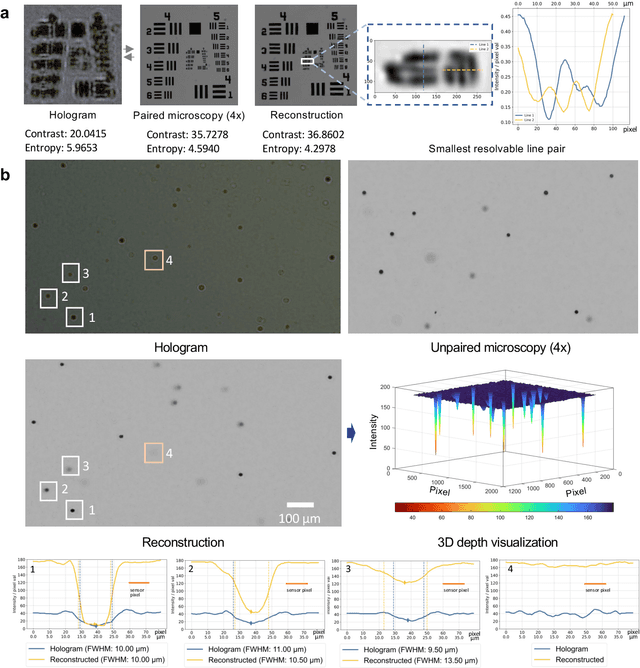
Advancements in high-throughput biomedical applications necessitate real-time, large field-of-view (FOV) imaging capabilities. Conventional lens-free imaging (LFI) systems, while addressing the limitations of physical lenses, have been constrained by dynamic, hard-to-model optical fields, resulting in a limited one-shot FOV of approximately 20 $mm^2$. This restriction has been a major bottleneck in applications like live-cell imaging and automation of microfluidic systems for biomedical research. Here, we present a deep-learning(DL)-based imaging framework - GenLFI - leveraging generative artificial intelligence (AI) for holographic image reconstruction. We demonstrate that GenLFI can achieve a real-time FOV over 550 $mm^2$, surpassing the current LFI system by more than 20-fold, and even larger than the world's largest confocal microscope by 1.76 times. The resolution is at the sub-pixel level of 5.52 $\mu m$, without the need for a shifting light source. The unsupervised learning-based reconstruction does not require optical field modeling, making imaging dynamic 3D samples (e.g., droplet-based microfluidics and 3D cell models) in complex optical fields possible. This GenLFI framework unlocks the potential of LFI systems, offering a robust tool to tackle new frontiers in high-throughput biomedical applications such as drug discovery.