 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking Watermarks in the Frequency Domain: A Modulated Diffusion Attack Framework
Apr 24, 2026Digital image watermarking has advanced rapidly for copyright protection of generative AI, yet the comparatively limited progress in watermark attack techniques has broken the attack-defense balance and hindered further advances in the field. In this paper, we propose FMDiffWA, a frequency-domain modulated diffusion framework for watermark attacks. Specifically, we introduce a frequency-domain watermark modulation (FWM) module and incorporate it into the sampling stages both the forward and reverse diffusion processes. This mechanism enables selective modulation of watermark-related frequency components, thereby allowing FMDiffWA to effectively neutralize the invisible watermark signals while preserving the perceptual quality of the attacked watermarked images. To achieve a better trade-off between attack efficacy and visual fidelity, we reformulate the training strategy of conventional diffusion models by augmenting the canonical noise estimation objective with an auxiliary refinement constraint. Comprehensive experiments demonstrate that FMDiffWA achieves superior visual fidelity compared to existing watermark attacks, while exhibiting strong generalization across diverse watermarking schemes.
Modular Soft Wearable Glove for Real-Time Gesture Recognition and Dynamic 3D Shape Reconstruction
Apr 08, 2025With the increasing demand for human-computer interaction (HCI), flexible wearable gloves have emerged as a promising solution in virtual reality, medical rehabilitation, and industrial automation. However, the current technology still has problems like insufficient sensitivity and limited durability, which hinder its wide application. This paper presents a highly sensitive, modular, and flexible capacitive sensor based on line-shaped electrodes and liquid metal (EGaIn), integrated into a sensor module tailored to the human hand's anatomy. The proposed system independently captures bending information from each finger joint, while additional measurements between adjacent fingers enable the recording of subtle variations in inter-finger spacing. This design enables accurate gesture recognition and dynamic hand morphological reconstruction of complex movements using point clouds. Experimental results demonstrate that our classifier based on Convolution Neural Network (CNN) and Multilayer Perceptron (MLP) achieves an accuracy of 99.15% across 30 gestures. Meanwhile, a transformer-based Deep Neural Network (DNN) accurately reconstructs dynamic hand shapes with an Average Distance (AD) of 2.076\pm3.231 mm, with the reconstruction accuracy at individual key points surpassing SOTA benchmarks by 9.7% to 64.9%. The proposed glove shows excellent accuracy, robustness and scalability in gesture recognition and hand reconstruction, making it a promising solution for next-generation HCI systems.
Team Northeastern's Approach to ANA XPRIZE Avatar Final Testing: A Holistic Approach to Telepresence and Lessons Learned
Mar 08, 2023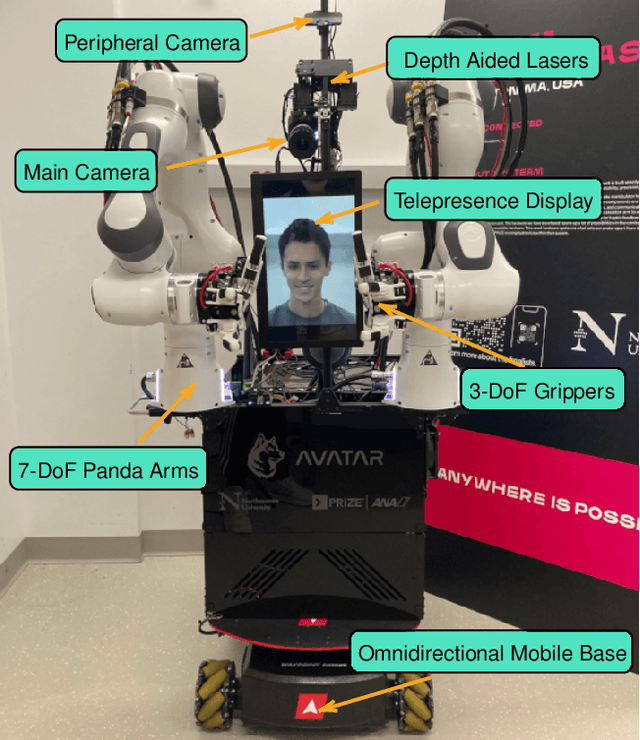
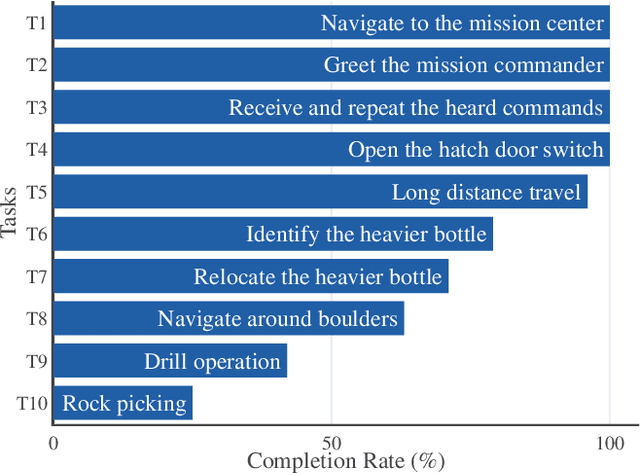
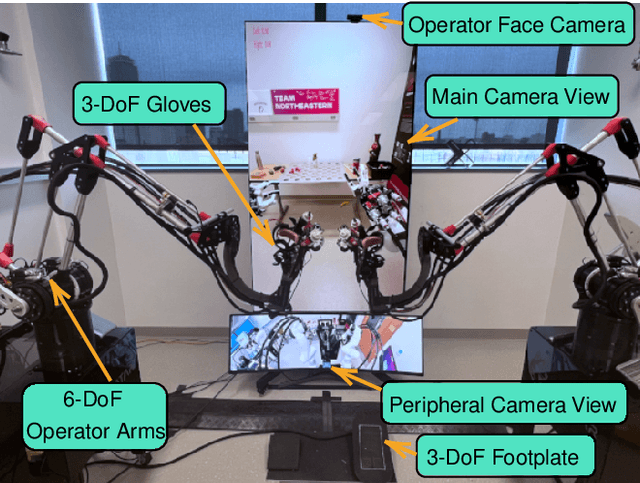
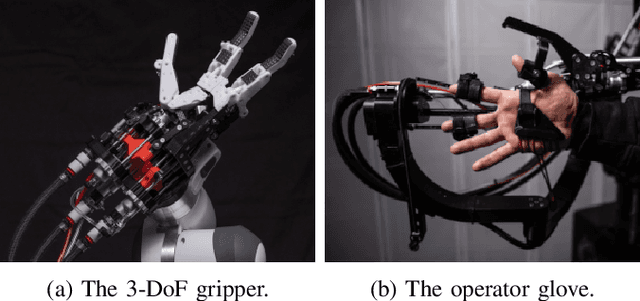
This paper reports on Team Northeastern's Avatar system for telepresence, and our holistic approach to meet the ANA Avatar XPRIZE Final testing task requirements. The system features a dual-arm configuration with hydraulically actuated glove-gripper pair for haptic force feedback. Our proposed Avatar system was evaluated in the ANA Avatar XPRIZE Finals and completed all 10 tasks, scored 14.5 points out of 15.0, and received the 3rd Place Award. We provide the details of improvements over our first generation Avatar, covering manipulation, perception, locomotion, power, network, and controller design. We also extensively discuss the major lessons learned during our participation in the competition.
Series Elastic Force Control for Soft Robotic Fluid Actuators
Apr 06, 2020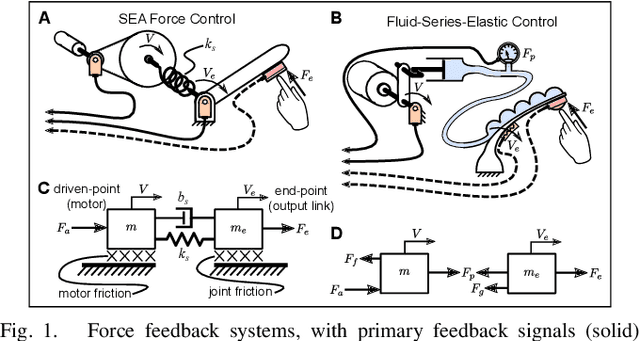
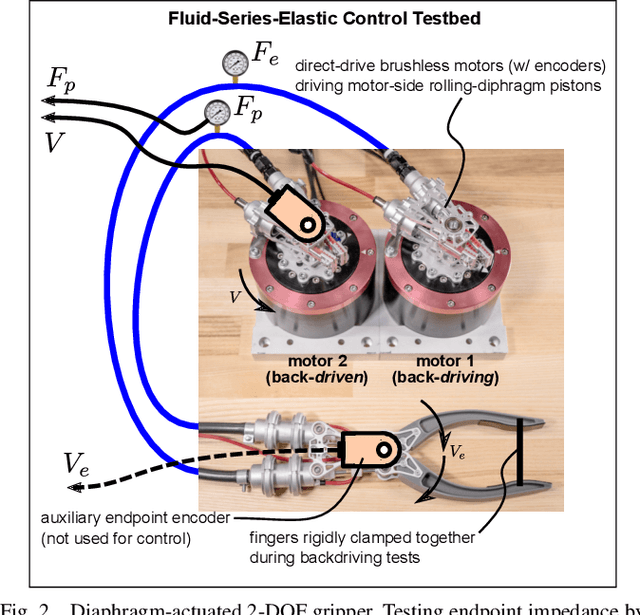
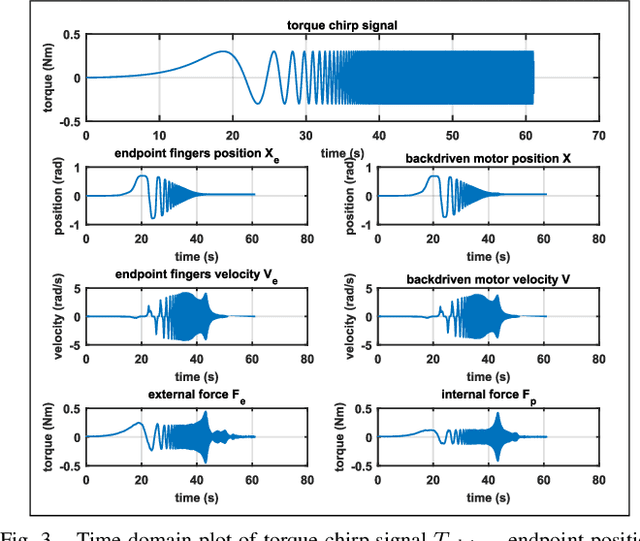
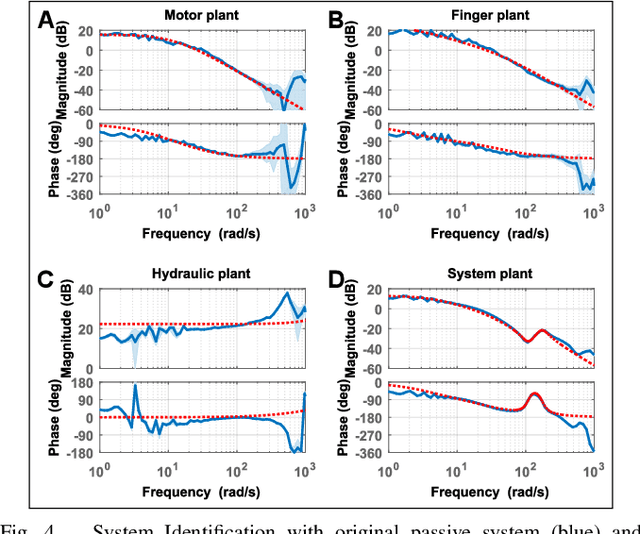
Fluid-based soft actuators are an attractive option for lightweight and human-safe robots. These actuators, combined with fluid pressure force feedback, are in principle a form of series-elastic actuation (SEA), in which nearly all driving-point (e.g. motor/gearbox) friction can be eliminated. Fiber-elastomer soft actuators offer unique low-friction and low-hysteresis mechanical properties which are particularly suited to force-control based on internal pressure force feedback, rather than traditional external force feedback using force/tactile sensing, since discontinuous (Coulomb) endpoint friction is unobservable to internal fluid pressure. However, compensation of endpoint smooth hysteresis through a model-based feedforward term is possible. We report on internal-pressure force feedback through a disturbance observer (DOB) and model-based feedforward compensation of endpoint friction and nonlinear hysteresis for a 2-DOF lightweight robotic gripper driven by rolling-diaphragm linear actuators coupled to direct-drive brushless motors, achieving an active low-frequency endpoint impedance range ("Z-width") of 50dB.