Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeam Northeastern's Approach to ANA XPRIZE Avatar Final Testing: A Holistic Approach to Telepresence and Lessons Learned
Mar 08, 2023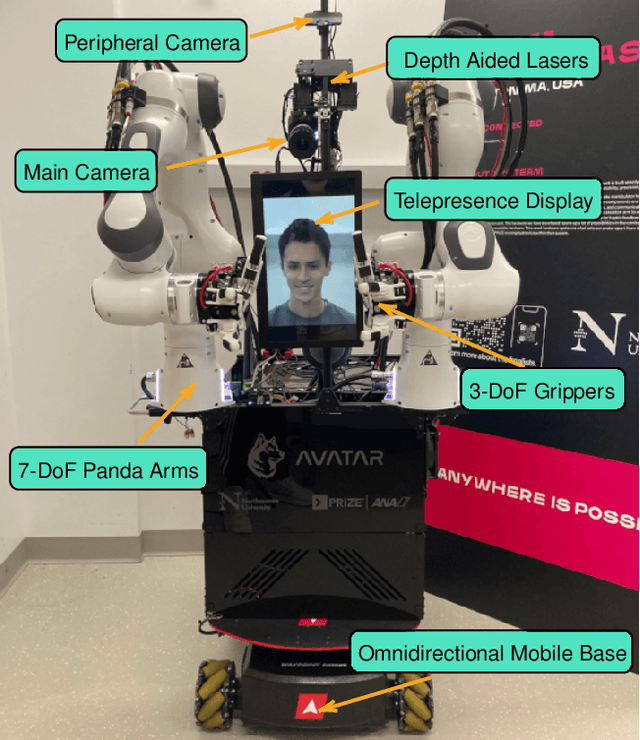
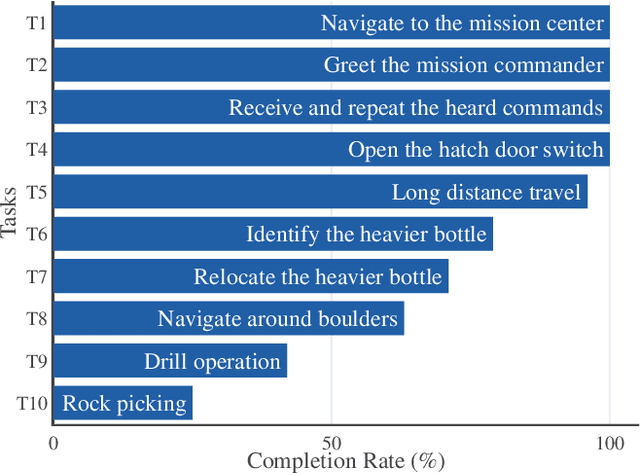
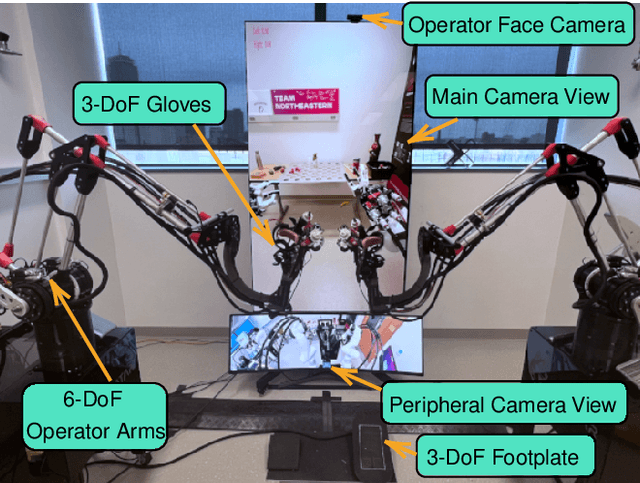
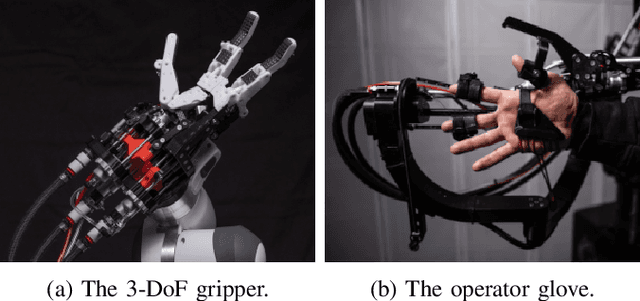
This paper reports on Team Northeastern's Avatar system for telepresence, and our holistic approach to meet the ANA Avatar XPRIZE Final testing task requirements. The system features a dual-arm configuration with hydraulically actuated glove-gripper pair for haptic force feedback. Our proposed Avatar system was evaluated in the ANA Avatar XPRIZE Finals and completed all 10 tasks, scored 14.5 points out of 15.0, and received the 3rd Place Award. We provide the details of improvements over our first generation Avatar, covering manipulation, perception, locomotion, power, network, and controller design. We also extensively discuss the major lessons learned during our participation in the competition.
* 7 pages, submitted to IROS 2023
Via