 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Bayes Filter Models for Tactile Localization
Nov 11, 2020



Localizing and tracking the pose of robotic grippers are necessary skills for manipulation tasks. However, the manipulators with imprecise kinematic models (e.g. low-cost arms) or manipulators with unknown world coordinates (e.g. poor camera-arm calibration) cannot locate the gripper with respect to the world. In these circumstances, we can leverage tactile feedback between the gripper and the environment. In this paper, we present learnable Bayes filter models that can localize robotic grippers using tactile feedback. We propose a novel observation model that conditions the tactile feedback on visual maps of the environment along with a motion model to recursively estimate the gripper's location. Our models are trained in simulation with self-supervision and transferred to the real world. Our method is evaluated on a tabletop localization task in which the gripper interacts with objects. We report results in simulation and on a real robot, generalizing over different sizes, shapes, and configurations of the objects.
Series Elastic Force Control for Soft Robotic Fluid Actuators
Apr 06, 2020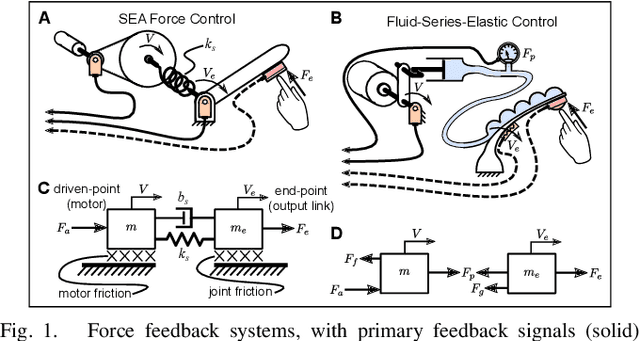
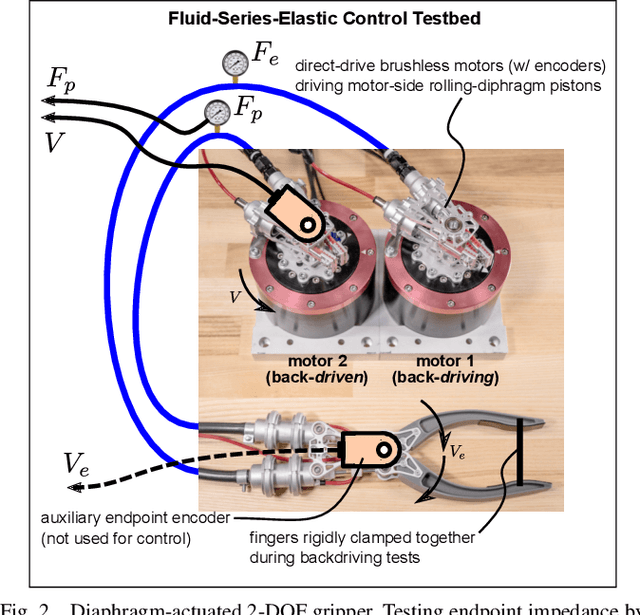
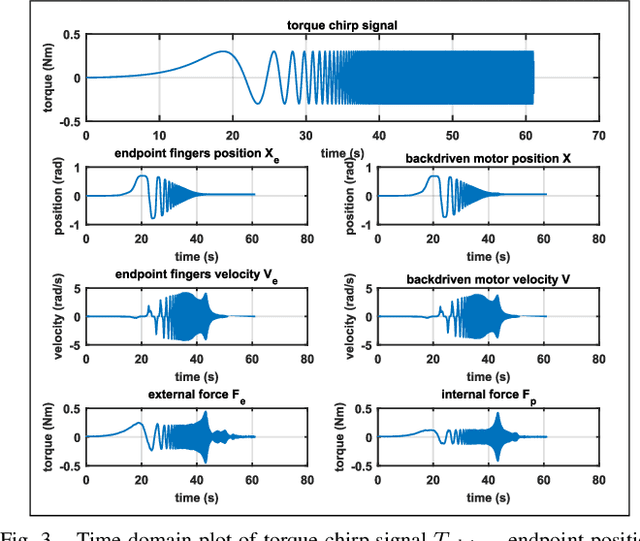
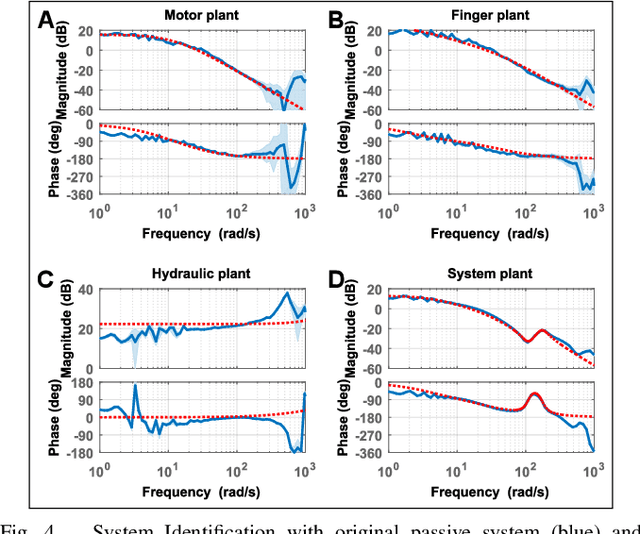
Fluid-based soft actuators are an attractive option for lightweight and human-safe robots. These actuators, combined with fluid pressure force feedback, are in principle a form of series-elastic actuation (SEA), in which nearly all driving-point (e.g. motor/gearbox) friction can be eliminated. Fiber-elastomer soft actuators offer unique low-friction and low-hysteresis mechanical properties which are particularly suited to force-control based on internal pressure force feedback, rather than traditional external force feedback using force/tactile sensing, since discontinuous (Coulomb) endpoint friction is unobservable to internal fluid pressure. However, compensation of endpoint smooth hysteresis through a model-based feedforward term is possible. We report on internal-pressure force feedback through a disturbance observer (DOB) and model-based feedforward compensation of endpoint friction and nonlinear hysteresis for a 2-DOF lightweight robotic gripper driven by rolling-diaphragm linear actuators coupled to direct-drive brushless motors, achieving an active low-frequency endpoint impedance range ("Z-width") of 50dB.