 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-enhanced electronic skin for tactile sensing on deformable surface based on electrical impedance tomography
Apr 08, 2025Electrical Impedance Tomography (EIT)-based tactile sensors offer cost-effective and scalable solutions for robotic sensing, especially promising for soft robots. However a major issue of EIT-based tactile sensors when applied in highly deformable objects is their performance degradation due to surface deformations. This limitation stems from their inherent sensitivity to strain, which is particularly exacerbated in soft bodies, thus requiring dedicated data interpretation to disentangle the parameter being measured and the signal deriving from shape changes. This has largely limited their practical implementations. This paper presents a machine learning-assisted tactile sensing approach to address this challenge by tracking surface deformations and segregating this contribution in the signal readout during tactile sensing. We first capture the deformations of the target object, followed by tactile reconstruction using a deep learning model specifically designed to process and fuse EIT data and deformation information. Validations using numerical simulations achieved high correlation coefficients (0.9660 - 0.9999), peak signal-to-noise ratios (28.7221 - 55.5264 dB) and low relative image errors (0.0107 - 0.0805). Experimental validations, using a hydrogel-based EIT e-skin under various deformation scenarios, further demonstrated the effectiveness of the proposed approach in real-world settings. The findings could underpin enhanced tactile interaction in soft and highly deformable robotic applications.
Touch and deformation perception of soft manipulators with capacitive e-skins and deep learning
May 02, 2023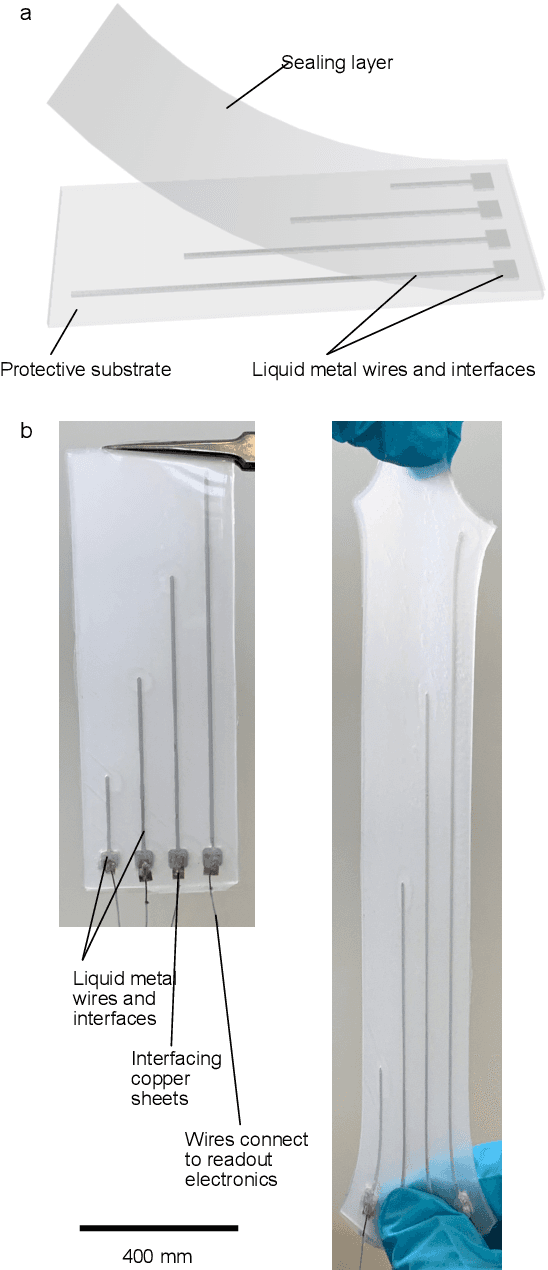


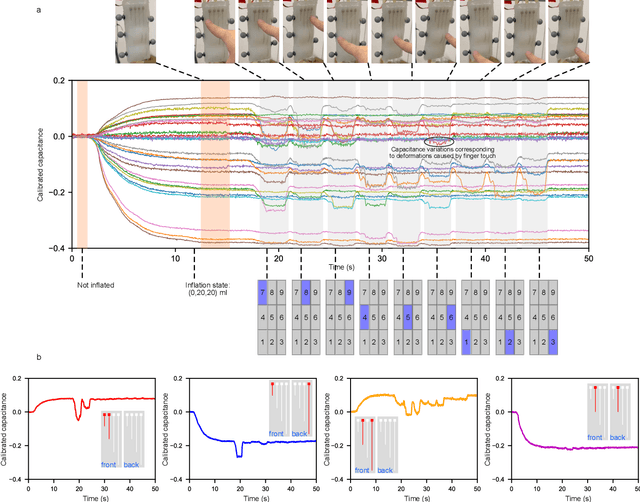
Tactile sensing in soft robots remains particularly challenging because of the coupling between contact and deformation information which the sensor is subject to during actuation and interaction with the environment. This often results in severe interference and makes disentangling tactile sensing and geometric deformation difficult. To address this problem, this paper proposes a soft capacitive e-skin with a sparse electrode distribution and deep learning for information decoupling. Our approach successfully separates tactile sensing from geometric deformation, enabling touch recognition on a soft pneumatic actuator subject to both internal (actuation) and external (manual handling) forces. Using a multi-layer perceptron, the proposed e-skin achieves 99.88\% accuracy in touch recognition across a range of deformations. When complemented with prior knowledge, a transformer-based architecture effectively tracks the deformation of the soft actuator. The average distance error in positional reconstruction of the manipulator is as low as 2.905$\pm$2.207 mm, even under operative conditions with different inflation states and physical contacts which lead to additional signal variations and consequently interfere with deformation tracking. These findings represent a tangible way forward in the development of e-skins that can endow soft robots with proprioception and exteroception.