 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNo Need For Real Anomaly: MLLM Empowered Zero-Shot Video Anomaly Detection
Feb 22, 2026The collection and detection of video anomaly data has long been a challenging problem due to its rare occurrence and spatio-temporal scarcity. Existing video anomaly detection (VAD) methods under perform in open-world scenarios. Key contributing factors include limited dataset diversity, and inadequate understanding of context-dependent anomalous semantics. To address these issues, i) we propose LAVIDA, an end-to-end zero-shot video anomaly detection framework. ii) LAVIDA employs an Anomaly Exposure Sampler that transforms segmented objects into pseudo-anomalies to enhance model adaptability to unseen anomaly categories. It further integrates a Multimodal Large Language Model (MLLM) to bolster semantic comprehension capabilities. Additionally, iii) we design a token compression approach based on reverse attention to handle the spatio-temporal scarcity of anomalous patterns and decrease computational cost. The training process is conducted solely on pseudo anomalies without any VAD data. Evaluations across four benchmark VAD datasets demonstrate that LAVIDA achieves SOTA performance in both frame-level and pixel-level anomaly detection under the zero-shot setting. Our code is available in https://github.com/VitaminCreed/LAVIDA.
DenSe-AdViT: A novel Vision Transformer for Dense SAR Object Detection
Apr 18, 2025Vision Transformer (ViT) has achieved remarkable results in object detection for synthetic aperture radar (SAR) images, owing to its exceptional ability to extract global features. However, it struggles with the extraction of multi-scale local features, leading to limited performance in detecting small targets, especially when they are densely arranged. Therefore, we propose Density-Sensitive Vision Transformer with Adaptive Tokens (DenSe-AdViT) for dense SAR target detection. We design a Density-Aware Module (DAM) as a preliminary component that generates a density tensor based on target distribution. It is guided by a meticulously crafted objective metric, enabling precise and effective capture of the spatial distribution and density of objects. To integrate the multi-scale information enhanced by convolutional neural networks (CNNs) with the global features derived from the Transformer, Density-Enhanced Fusion Module (DEFM) is proposed. It effectively refines attention toward target-survival regions with the assist of density mask and the multiple sources features. Notably, our DenSe-AdViT achieves 79.8% mAP on the RSDD dataset and 92.5% on the SIVED dataset, both of which feature a large number of densely distributed vehicle targets.
An Adaptive Spatial-Temporal Local Feature Difference Method for Infrared Small-moving Target Detection
Sep 05, 2023Detecting small moving targets accurately in infrared (IR) image sequences is a significant challenge. To address this problem, we propose a novel method called spatial-temporal local feature difference (STLFD) with adaptive background suppression (ABS). Our approach utilizes filters in the spatial and temporal domains and performs pixel-level ABS on the output to enhance the contrast between the target and the background. The proposed method comprises three steps. First, we obtain three temporal frame images based on the current frame image and extract two feature maps using the designed spatial domain and temporal domain filters. Next, we fuse the information of the spatial domain and temporal domain to produce the spatial-temporal feature maps and suppress noise using our pixel-level ABS module. Finally, we obtain the segmented binary map by applying a threshold. Our experimental results demonstrate that the proposed method outperforms existing state-of-the-art methods for infrared small-moving target detection.
Deep Reinforcement Learning Based Tracking Control of an Autonomous Surface Vessel in Natural Waters
Feb 20, 2023Accurate control of autonomous marine robots still poses challenges due to the complex dynamics of the environment. In this paper, we propose a Deep Reinforcement Learning (DRL) approach to train a controller for autonomous surface vessel (ASV) trajectory tracking and compare its performance with an advanced nonlinear model predictive controller (NMPC) in real environments. Taking into account environmental disturbances (e.g., wind, waves, and currents), noisy measurements, and non-ideal actuators presented in the physical ASV, several effective reward functions for DRL tracking control policies are carefully designed. The control policies were trained in a simulation environment with diverse tracking trajectories and disturbances. The performance of the DRL controller has been verified and compared with the NMPC in both simulations with model-based environmental disturbances and in natural waters. Simulations show that the DRL controller has 53.33% lower tracking error than that of NMPC. Experimental results further show that, compared to NMPC, the DRL controller has 35.51% lower tracking error, indicating that DRL controllers offer better disturbance rejection in river environments than NMPC.
Survey of Deep Learning for Autonomous Surface Vehicles in the Marine Environment
Oct 16, 2022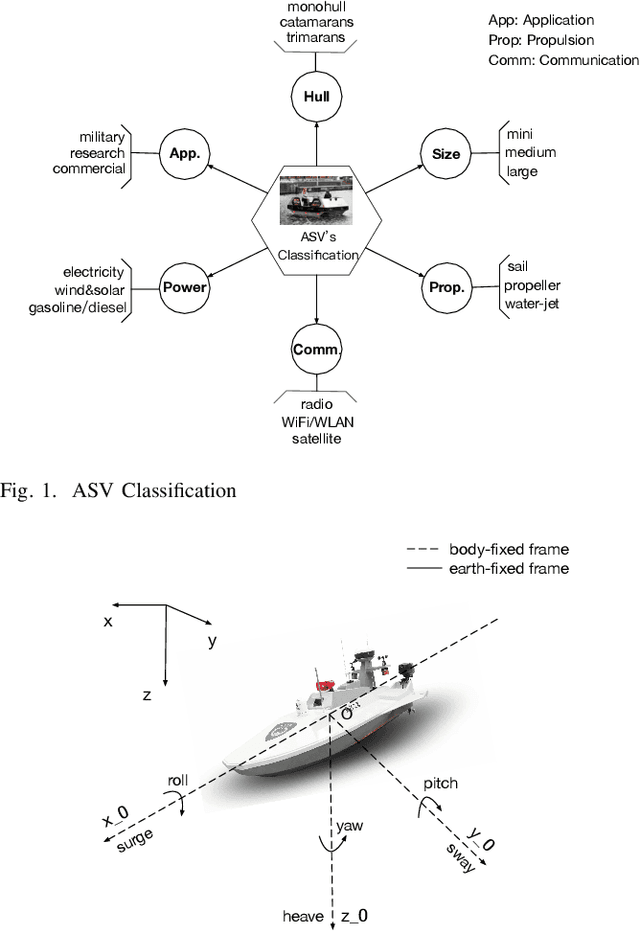
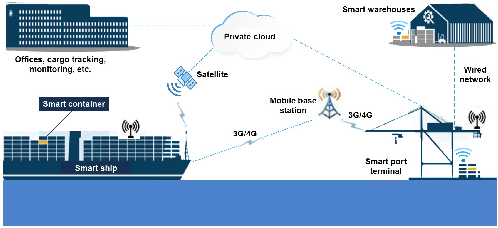
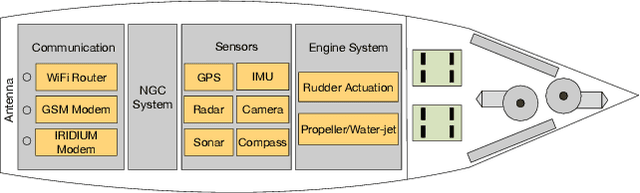
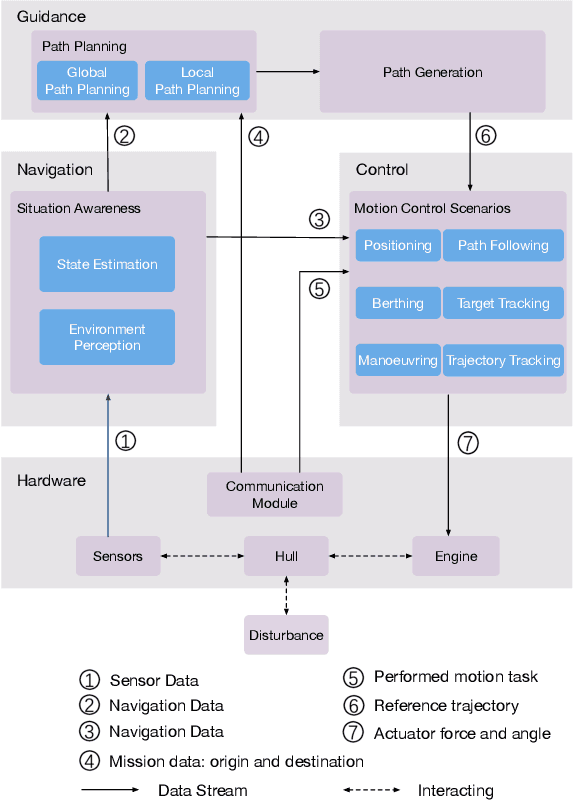
Within the next several years, there will be a high level of autonomous technology that will be available for widespread use, which will reduce labor costs, increase safety, save energy, enable difficult unmanned tasks in harsh environments, and eliminate human error. Compared to software development for other autonomous vehicles, maritime software development, especially on aging but still functional fleets, is described as being in a very early and emerging phase. This introduces very large challenges and opportunities for researchers and engineers to develop maritime autonomous systems. Recent progress in sensor and communication technology has introduced the use of autonomous surface vehicles (ASVs) in applications such as coastline surveillance, oceanographic observation, multi-vehicle cooperation, and search and rescue missions. Advanced artificial intelligence technology, especially deep learning (DL) methods that conduct nonlinear mapping with self-learning representations, has brought the concept of full autonomy one step closer to reality. This paper surveys the existing work regarding the implementation of DL methods in ASV-related fields. First, the scope of this work is described after reviewing surveys on ASV developments and technologies, which draws attention to the research gap between DL and maritime operations. Then, DL-based navigation, guidance, control (NGC) systems and cooperative operations, are presented. Finally, this survey is completed by highlighting the current challenges and future research directions.
Cross-stained Segmentation from Renal Biopsy Images Using Multi-level Adversarial Learning
Feb 20, 2020


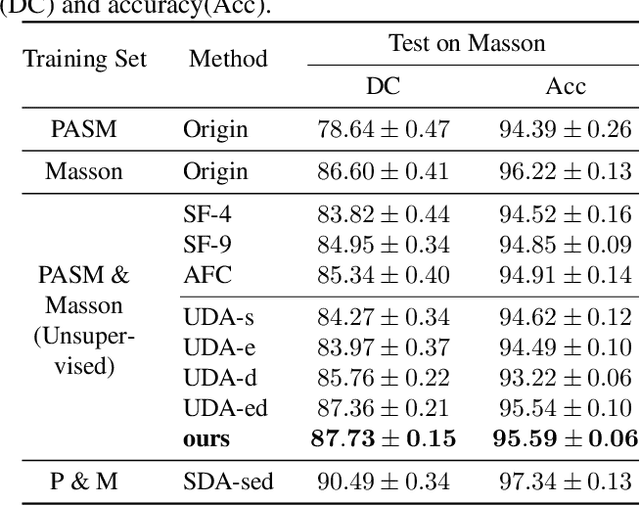
Segmentation from renal pathological images is a key step in automatic analyzing the renal histological characteristics. However, the performance of models varies significantly in different types of stained datasets due to the appearance variations. In this paper, we design a robust and flexible model for cross-stained segmentation. It is a novel multi-level deep adversarial network architecture that consists of three sub-networks: (i) a segmentation network; (ii) a pair of multi-level mirrored discriminators for guiding the segmentation network to extract domain-invariant features; (iii) a shape discriminator that is utilized to further identify the output of the segmentation network and the ground truth. Experimental results on glomeruli segmentation from renal biopsy images indicate that our network is able to improve segmentation performance on target type of stained images and use unlabeled data to achieve similar accuracy to labeled data. In addition, this method can be easily applied to other tasks.