 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboMatrix: A Skill-centric Hierarchical Framework for Scalable Robot Task Planning and Execution in Open-World
Nov 29, 2024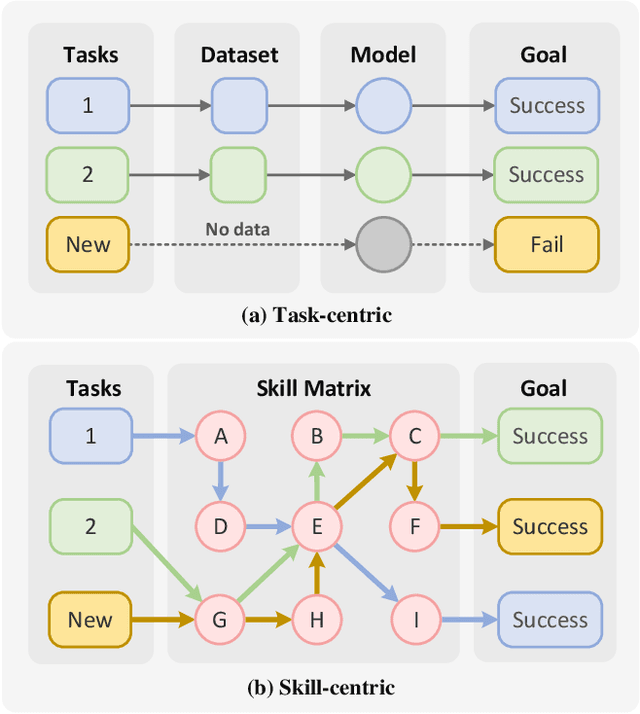
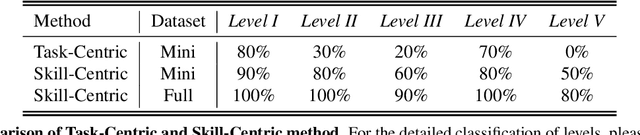
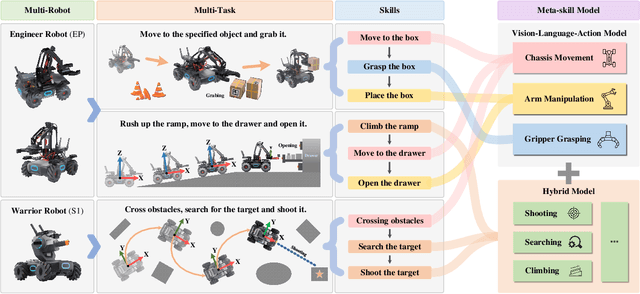

Existing policy learning methods predominantly adopt the task-centric paradigm, necessitating the collection of task data in an end-to-end manner. Consequently, the learned policy tends to fail to tackle novel tasks. Moreover, it is hard to localize the errors for a complex task with multiple stages due to end-to-end learning. To address these challenges, we propose RoboMatrix, a skill-centric and hierarchical framework for scalable task planning and execution. We first introduce a novel skill-centric paradigm that extracts the common meta-skills from different complex tasks. This allows for the capture of embodied demonstrations through a kill-centric approach, enabling the completion of open-world tasks by combining learned meta-skills. To fully leverage meta-skills, we further develop a hierarchical framework that decouples complex robot tasks into three interconnected layers: (1) a high-level modular scheduling layer; (2) a middle-level skill layer; and (3) a low-level hardware layer. Experimental results illustrate that our skill-centric and hierarchical framework achieves remarkable generalization performance across novel objects, scenes, tasks, and embodiments. This framework offers a novel solution for robot task planning and execution in open-world scenarios. Our software and hardware are available at https://github.com/WayneMao/RoboMatrix.
An Adaptive Spatial-Temporal Local Feature Difference Method for Infrared Small-moving Target Detection
Sep 05, 2023Detecting small moving targets accurately in infrared (IR) image sequences is a significant challenge. To address this problem, we propose a novel method called spatial-temporal local feature difference (STLFD) with adaptive background suppression (ABS). Our approach utilizes filters in the spatial and temporal domains and performs pixel-level ABS on the output to enhance the contrast between the target and the background. The proposed method comprises three steps. First, we obtain three temporal frame images based on the current frame image and extract two feature maps using the designed spatial domain and temporal domain filters. Next, we fuse the information of the spatial domain and temporal domain to produce the spatial-temporal feature maps and suppress noise using our pixel-level ABS module. Finally, we obtain the segmented binary map by applying a threshold. Our experimental results demonstrate that the proposed method outperforms existing state-of-the-art methods for infrared small-moving target detection.