 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Place Identity with Generative AI
Jun 07, 2023Researchers are constantly leveraging new forms of data with the goal of understanding how people perceive the built environment and build the collective place identity of cities. Latest advancements in generative artificial intelligence (AI) models have enabled the production of realistic representations learned from vast amounts of data. In this study, we aim to test the potential of generative AI as the source of textual and visual information in capturing the place identity of cities assessed by filtered descriptions and images. We asked questions on the place identity of a set of 31 global cities to two generative AI models, ChatGPT and DALL-E2. Since generative AI has raised ethical concerns regarding its trustworthiness, we performed cross-validation to examine whether the results show similar patterns to real urban settings. In particular, we compared the outputs with Wikipedia data for text and images searched from Google for image. Our results indicate that generative AI models have the potential to capture the collective image of cities that can make them distinguishable. This study is among the first attempts to explore the capabilities of generative AI in understanding human perceptions of the built environment. It contributes to urban design literature by discussing future research opportunities and potential limitations.
Urban Visual Intelligence: Studying Cities with AI and Street-level Imagery
Jan 02, 2023The visual dimension of cities has been a fundamental subject in urban studies, since the pioneering work of scholars such as Sitte, Lynch, Arnheim, and Jacobs. Several decades later, big data and artificial intelligence (AI) are revolutionizing how people move, sense, and interact with cities. This paper reviews the literature on the appearance and function of cities to illustrate how visual information has been used to understand them. A conceptual framework, Urban Visual Intelligence, is introduced to systematically elaborate on how new image data sources and AI techniques are reshaping the way researchers perceive and measure cities, enabling the study of the physical environment and its interactions with socioeconomic environments at various scales. The paper argues that these new approaches enable researchers to revisit the classic urban theories and themes, and potentially help cities create environments that are more in line with human behaviors and aspirations in the digital age.
Survey of Deep Learning for Autonomous Surface Vehicles in the Marine Environment
Oct 16, 2022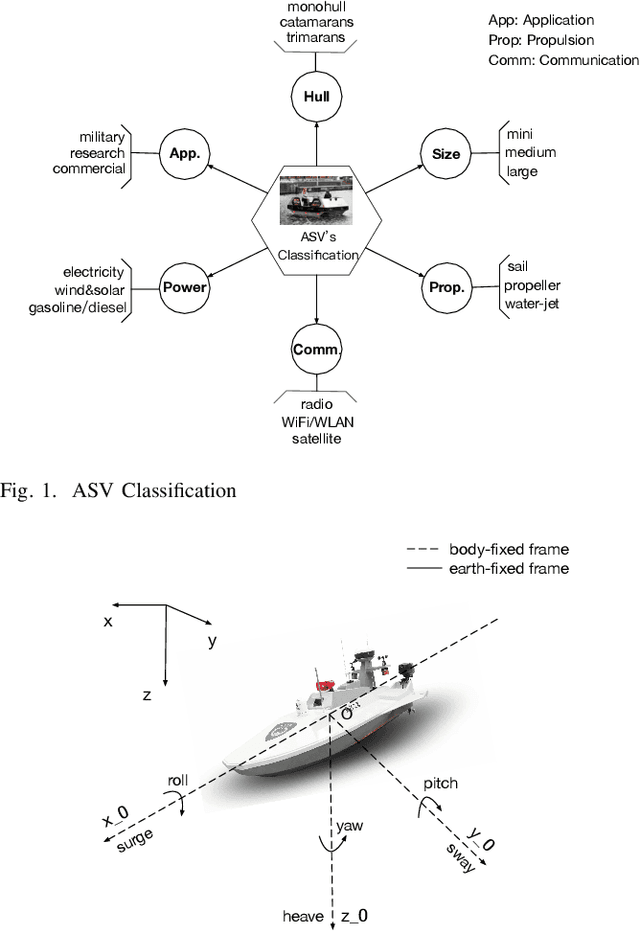
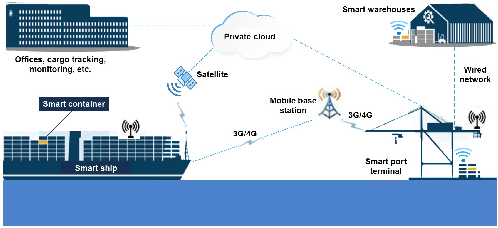
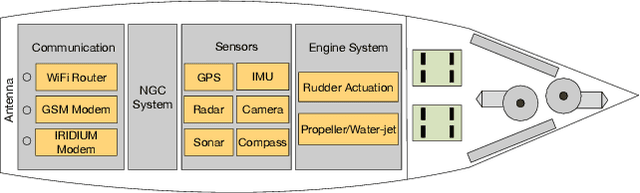
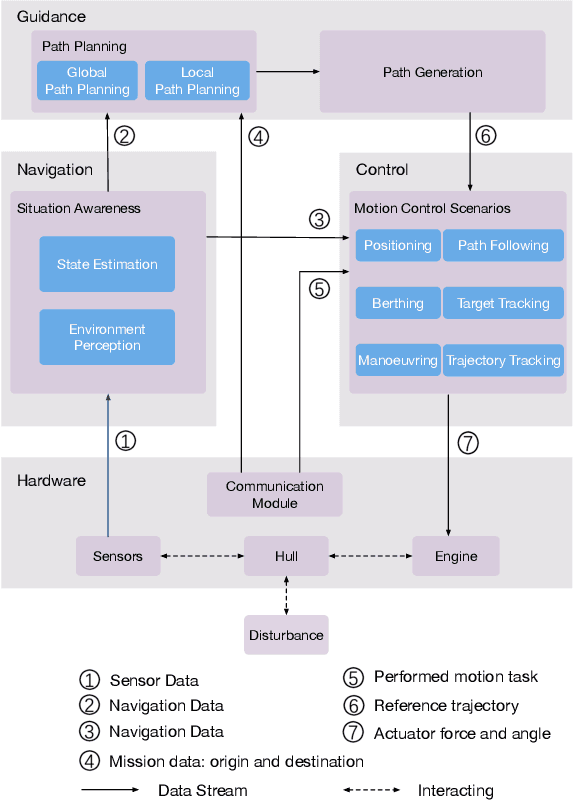
Within the next several years, there will be a high level of autonomous technology that will be available for widespread use, which will reduce labor costs, increase safety, save energy, enable difficult unmanned tasks in harsh environments, and eliminate human error. Compared to software development for other autonomous vehicles, maritime software development, especially on aging but still functional fleets, is described as being in a very early and emerging phase. This introduces very large challenges and opportunities for researchers and engineers to develop maritime autonomous systems. Recent progress in sensor and communication technology has introduced the use of autonomous surface vehicles (ASVs) in applications such as coastline surveillance, oceanographic observation, multi-vehicle cooperation, and search and rescue missions. Advanced artificial intelligence technology, especially deep learning (DL) methods that conduct nonlinear mapping with self-learning representations, has brought the concept of full autonomy one step closer to reality. This paper surveys the existing work regarding the implementation of DL methods in ASV-related fields. First, the scope of this work is described after reviewing surveys on ASV developments and technologies, which draws attention to the research gap between DL and maritime operations. Then, DL-based navigation, guidance, control (NGC) systems and cooperative operations, are presented. Finally, this survey is completed by highlighting the current challenges and future research directions.
Deep Learning Based Video System for Accurate and Real-Time Parking Measurement
Feb 20, 2019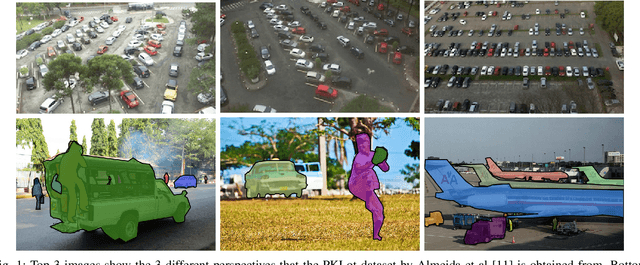
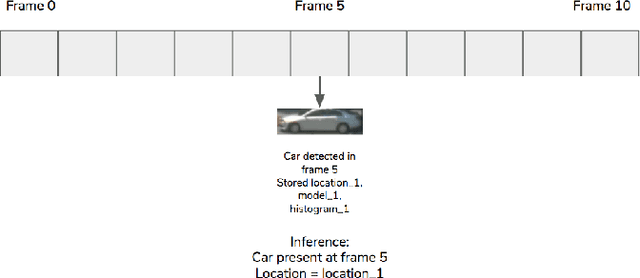
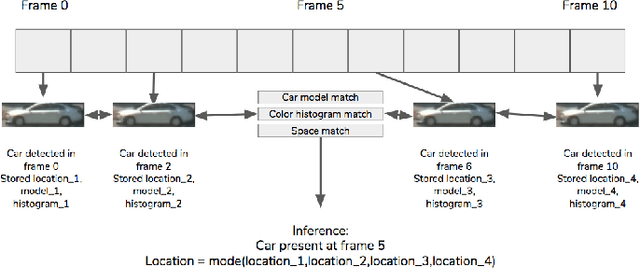
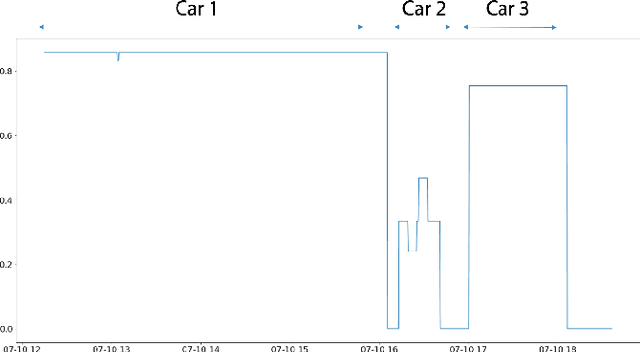
Parking spaces are costly to build, parking payments are difficult to enforce, and drivers waste an excessive amount of time searching for empty lots. Accurate quantification would inform developers and municipalities in space allocation and design, while real-time measurements would provide drivers and parking enforcement with information that saves time and resources. In this paper, we propose an accurate and real-time video system for future Internet of Things (IoT) and smart cities applications. Using recent developments in deep convolutional neural networks (DCNNs) and a novel vehicle tracking filter, we combine information across multiple image frames in a video sequence to remove noise introduced by occlusions and detection failures. We demonstrate that our system achieves higher accuracy than pure image-based instance segmentation, and is comparable in performance to industry benchmark systems that utilize more expensive sensors such as radar. Furthermore, our system shows significant potential in its scalability to a city-wide scale and also in the richness of its output that goes beyond traditional binary occupancy statistics.