 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Based Video System for Accurate and Real-Time Parking Measurement
Feb 20, 2019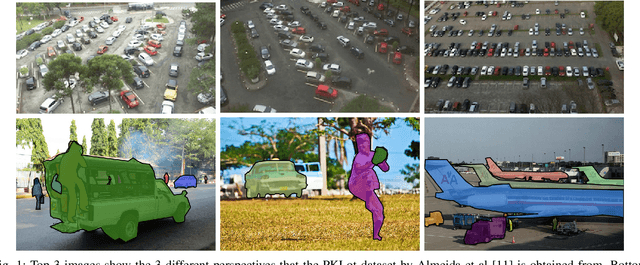
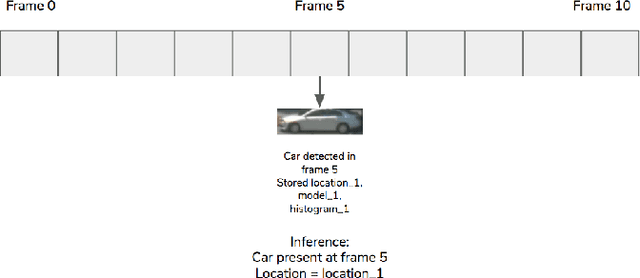
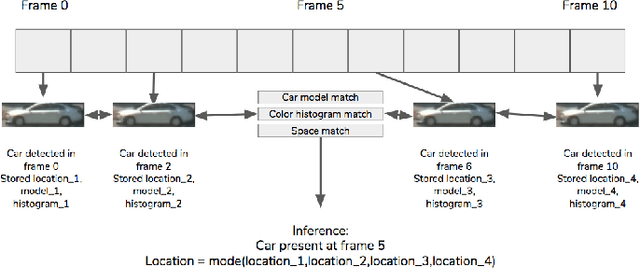
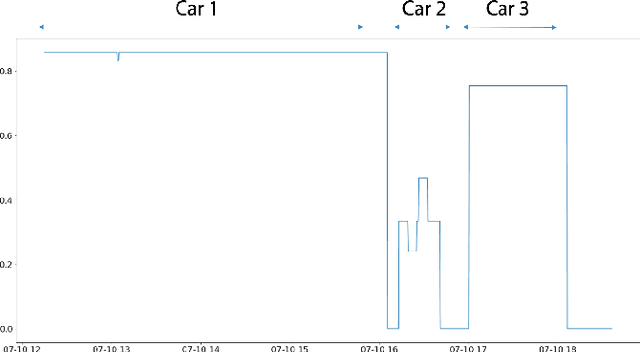
Parking spaces are costly to build, parking payments are difficult to enforce, and drivers waste an excessive amount of time searching for empty lots. Accurate quantification would inform developers and municipalities in space allocation and design, while real-time measurements would provide drivers and parking enforcement with information that saves time and resources. In this paper, we propose an accurate and real-time video system for future Internet of Things (IoT) and smart cities applications. Using recent developments in deep convolutional neural networks (DCNNs) and a novel vehicle tracking filter, we combine information across multiple image frames in a video sequence to remove noise introduced by occlusions and detection failures. We demonstrate that our system achieves higher accuracy than pure image-based instance segmentation, and is comparable in performance to industry benchmark systems that utilize more expensive sensors such as radar. Furthermore, our system shows significant potential in its scalability to a city-wide scale and also in the richness of its output that goes beyond traditional binary occupancy statistics.
Treepedia 2.0: Applying Deep Learning for Large-scale Quantification of Urban Tree Cover
Aug 14, 2018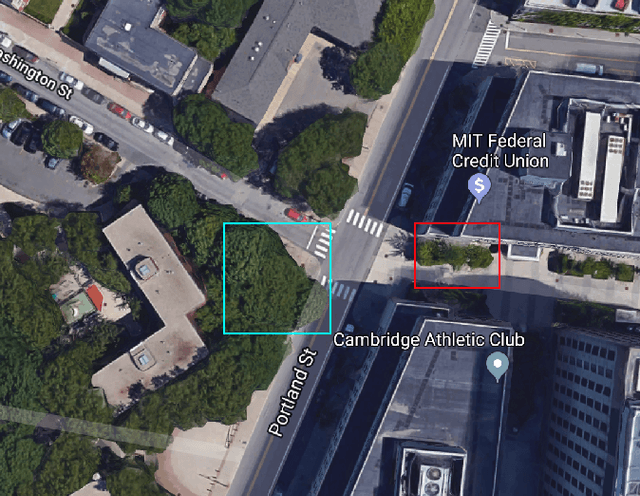
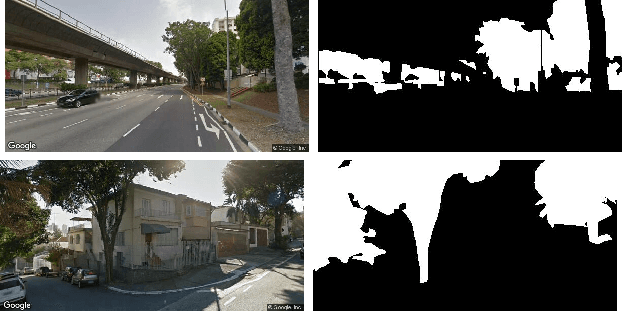

Recent advances in deep learning have made it possible to quantify urban metrics at fine resolution, and over large extents using street-level images. Here, we focus on measuring urban tree cover using Google Street View (GSV) images. First, we provide a small-scale labelled validation dataset and propose standard metrics to compare the performance of automated estimations of street tree cover using GSV. We apply state-of-the-art deep learning models, and compare their performance to a previously established benchmark of an unsupervised method. Our training procedure for deep learning models is novel; we utilize the abundance of openly available and similarly labelled street-level image datasets to pre-train our model. We then perform additional training on a small training dataset consisting of GSV images. We find that deep learning models significantly outperform the unsupervised benchmark method. Our semantic segmentation model increased mean intersection-over-union (IoU) from 44.10% to 60.42% relative to the unsupervised method and our end-to-end model decreased Mean Absolute Error from 10.04% to 4.67%. We also employ a recently developed method called gradient-weighted class activation map (Grad-CAM) to interpret the features learned by the end-to-end model. This technique confirms that the end-to-end model has accurately learned to identify tree cover area as key features for predicting percentage tree cover. Our paper provides an example of applying advanced deep learning techniques on a large-scale, geo-tagged and image-based dataset to efficiently estimate important urban metrics. The results demonstrate that deep learning models are highly accurate, can be interpretable, and can also be efficient in terms of data-labelling effort and computational resources.
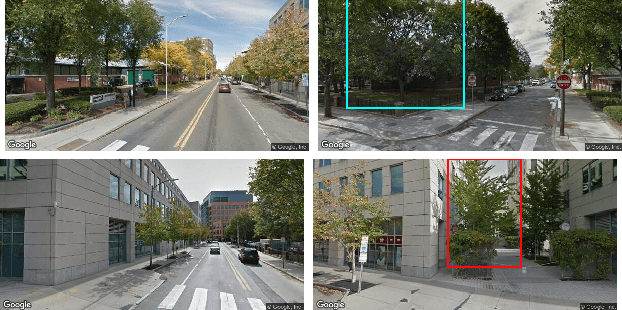
A novel method for predicting and mapping the presence of sun glare using Google Street View
Aug 05, 2018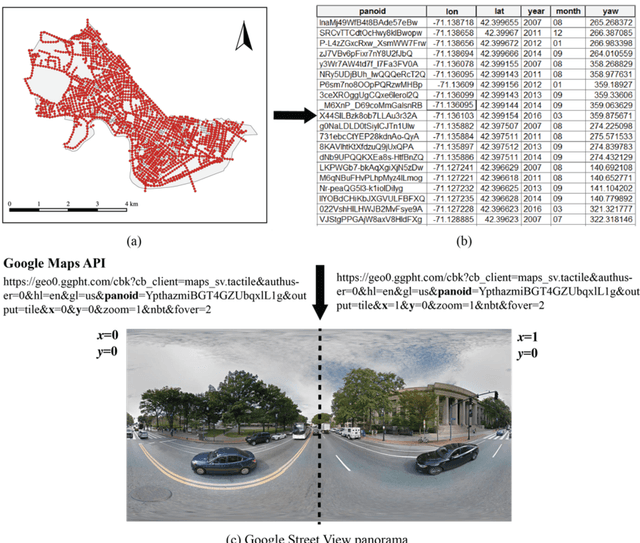
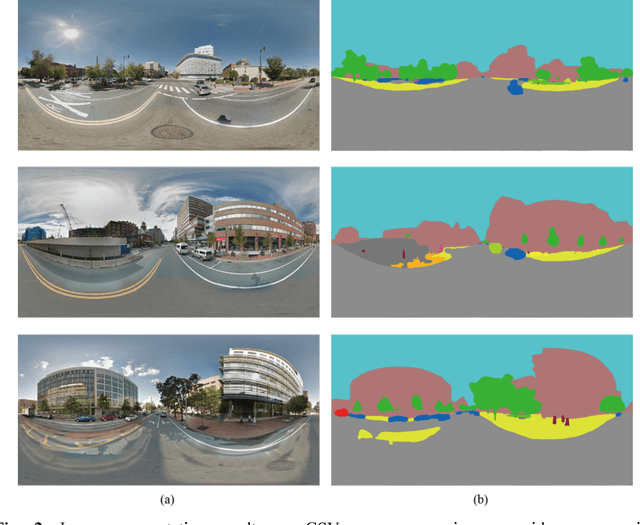
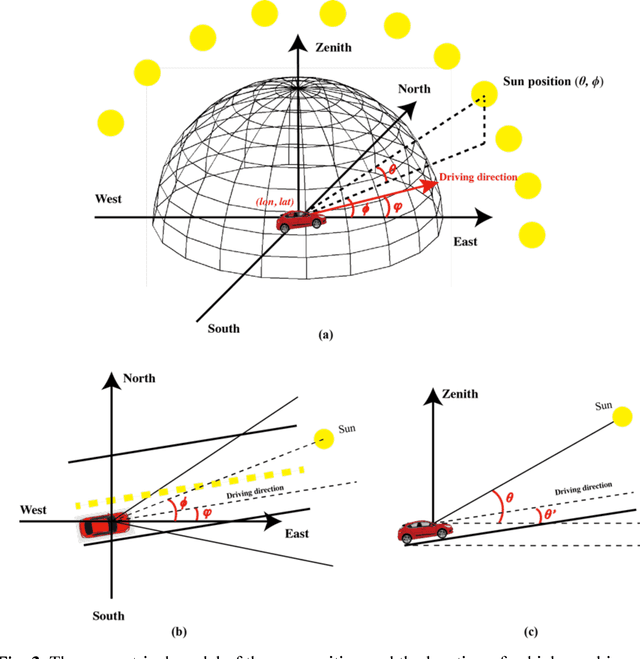
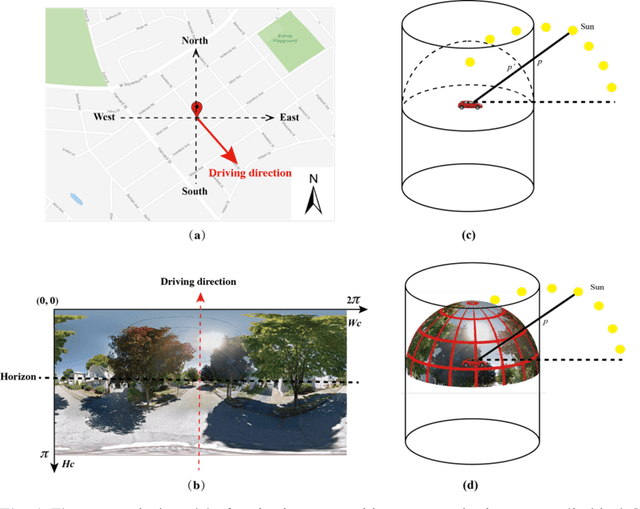
The sun glare is one of the major environmental hazards that cause traffic accidents. Every year, many people died and injured in traffic accidents related to sun glare. Providing accurate information about when and where sun glare happens would be helpful to prevent sun glare caused traffic accidents and save lives. In this study, we proposed to use publicly accessible Google Street View (GSV) panorama images to estimate and predict the occurrence of sun glare. GSV images have view sight similar to drivers, which would make GSV images suitable for estimating the visibility of sun glare to drivers. A recently developed convolutional neural network algorithm was used to segment GSV images and predict obstructions on sun glare. Based on the predicted obstructions for given locations, we further estimated the time windows of sun glare by estimating the sun positions and the relative angles between drivers and the sun for those locations. We conducted a case study in Cambridge, Massachusetts, USA. Results show that the method can predict the presence of sun glare precisely. The proposed method would provide an important tool for drivers and traffic planners to mitigate the sun glare and decrease the potential traffic accidents caused by the sun glare.