 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo discretize continually: Mean shift interacting particle systems for Bayesian inference
May 13, 2026Integration against a probability distribution given its unnormalized density is a central task in Bayesian inference and other fields. We introduce new methods for approximating such expectations with a small set of weighted samples -- i.e., a quadrature rule -- constructed via an interacting particle system that minimizes maximum mean discrepancy (MMD) to the target distribution. These methods extend the classical mean shift algorithm, as well as recent algorithms for optimal quantization of empirical distributions, to the case of continuous distributions. Crucially, our approach creates dynamics for MMD minimization that are invariant to the unknown normalizing constant; they also admit both gradient-free and gradient-informed implementations. The resulting mean shift interacting particle systems converge quickly, capture anisotropy and multi-modality, avoid mode collapse, and scale to high dimensions. We demonstrate their performance on a wide range of benchmark sampling problems, including multi-modal mixtures, Bayesian hierarchical models, PDE-constrained inverse problems, and beyond.
Transport map unadjusted Langevin algorithms
Feb 28, 2023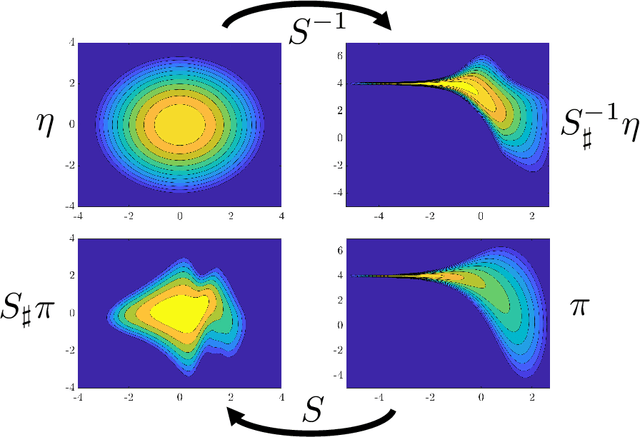
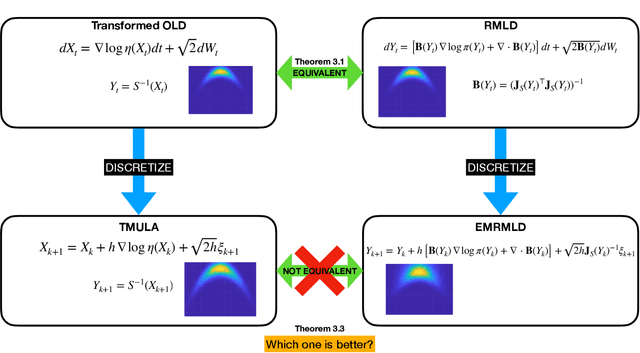
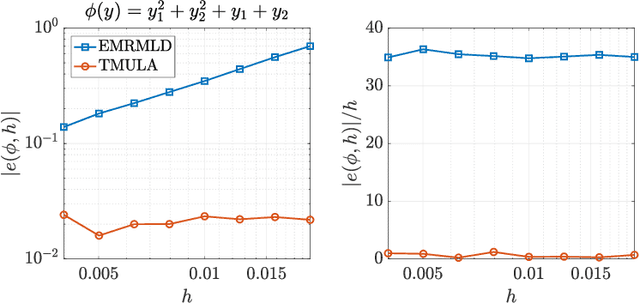
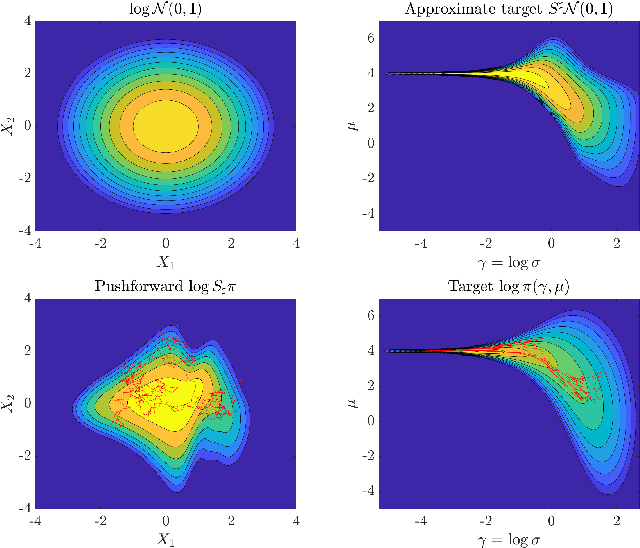
Langevin dynamics are widely used in sampling high-dimensional, non-Gaussian distributions whose densities are known up to a normalizing constant. In particular, there is strong interest in unadjusted Langevin algorithms (ULA), which directly discretize Langevin dynamics to estimate expectations over the target distribution. We study the use of transport maps that approximately normalize a target distribution as a way to precondition and accelerate the convergence of Langevin dynamics. We show that in continuous time, when a transport map is applied to Langevin dynamics, the result is a Riemannian manifold Langevin dynamics (RMLD) with metric defined by the transport map. This connection suggests more systematic ways of learning metrics, and also yields alternative discretizations of the RMLD described by the map, which we study. Moreover, we show that under certain conditions, when the transport map is used in conjunction with ULA, we can improve the geometric rate of convergence of the output process in the 2--Wasserstein distance. Illustrative numerical results complement our theoretical claims.
Bayesian model calibration for block copolymer self-assembly: Likelihood-free inference and expected information gain computation via measure transport
Jun 22, 2022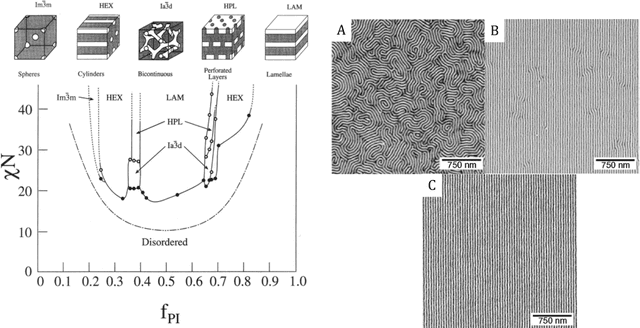
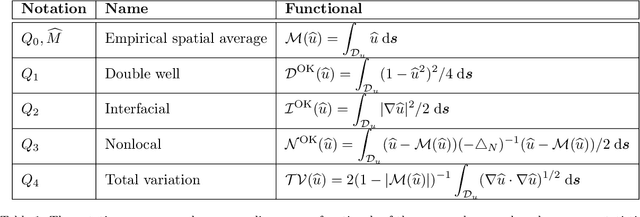
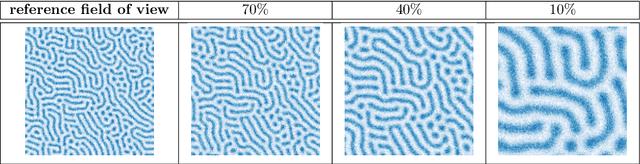
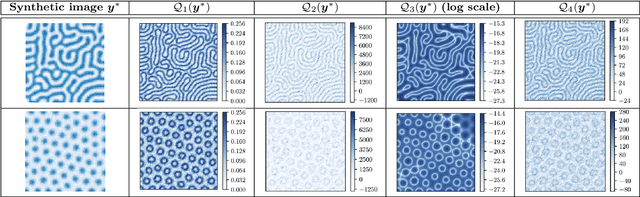
We consider the Bayesian calibration of models describing the phenomenon of block copolymer (BCP) self-assembly using image data produced by microscopy or X-ray scattering techniques. To account for the random long-range disorder in BCP equilibrium structures, we introduce auxiliary variables to represent this aleatory uncertainty. These variables, however, result in an integrated likelihood for high-dimensional image data that is generally intractable to evaluate. We tackle this challenging Bayesian inference problem using a likelihood-free approach based on measure transport together with the construction of summary statistics for the image data. We also show that expected information gains (EIGs) from the observed data about the model parameters can be computed with no significant additional cost. Lastly, we present a numerical case study based on the Ohta--Kawasaki model for diblock copolymer thin film self-assembly and top-down microscopy characterization. For calibration, we introduce several domain-specific energy- and Fourier-based summary statistics, and quantify their informativeness using EIG. We demonstrate the power of the proposed approach to study the effect of data corruptions and experimental designs on the calibration results.
Geometry-informed irreversible perturbations for accelerated convergence of Langevin dynamics
Aug 18, 2021

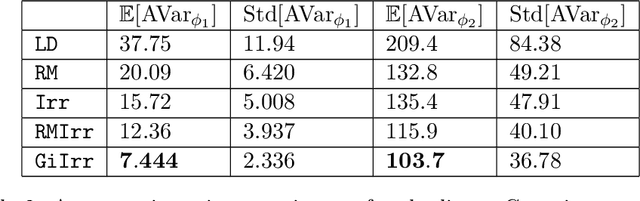
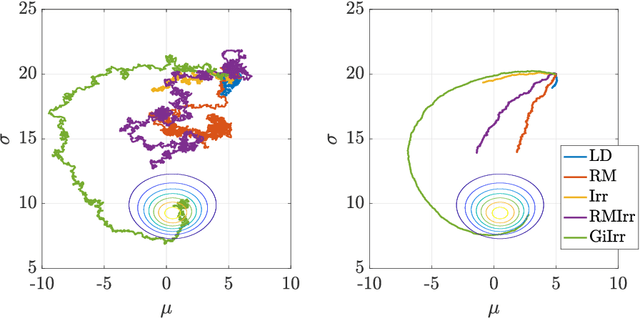
We introduce a novel geometry-informed irreversible perturbation that accelerates convergence of the Langevin algorithm for Bayesian computation. It is well documented that there exist perturbations to the Langevin dynamics that preserve its invariant measure while accelerating its convergence. Irreversible perturbations and reversible perturbations (such as Riemannian manifold Langevin dynamics (RMLD)) have separately been shown to improve the performance of Langevin samplers. We consider these two perturbations simultaneously by presenting a novel form of irreversible perturbation for RMLD that is informed by the underlying geometry. Through numerical examples, we show that this new irreversible perturbation can improve performance of the estimator over reversible perturbations that do not take the geometry into account. Moreover we demonstrate that irreversible perturbations generally can be implemented in conjunction with the stochastic gradient version of the Langevin algorithm. Lastly, while continuous-time irreversible perturbations cannot impair the performance of a Langevin estimator, the situation can sometimes be more complicated when discretization is considered. To this end, we describe a discrete-time example in which irreversibility increases both the bias and variance of the resulting estimator.
High-Dimensional Stochastic Optimal Control using Continuous Tensor Decompositions
Jan 11, 2018
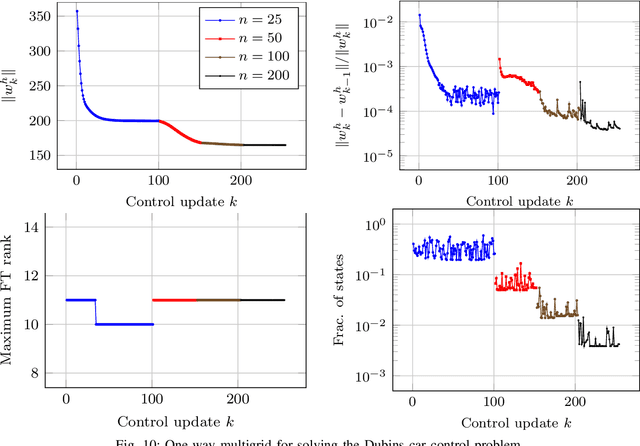
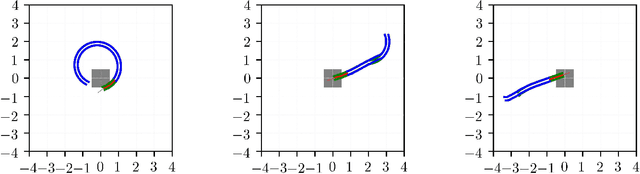
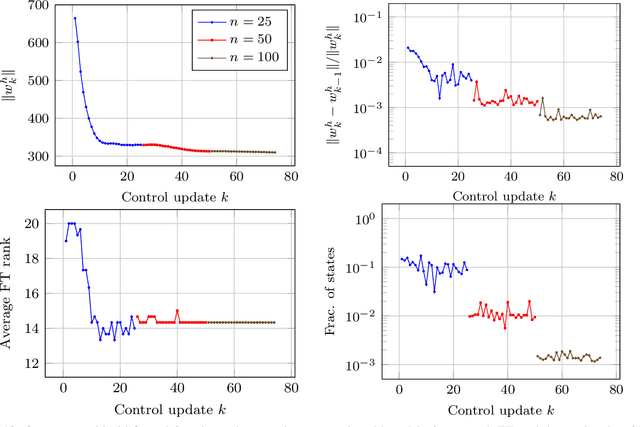
Motion planning and control problems are embedded and essential in almost all robotics applications. These problems are often formulated as stochastic optimal control problems and solved using dynamic programming algorithms. Unfortunately, most existing algorithms that guarantee convergence to optimal solutions suffer from the curse of dimensionality: the run time of the algorithm grows exponentially with the dimension of the state space of the system. We propose novel dynamic programming algorithms that alleviate the curse of dimensionality in problems that exhibit certain low-rank structure. The proposed algorithms are based on continuous tensor decompositions recently developed by the authors. Essentially, the algorithms represent high-dimensional functions (e.g., the value function) in a compressed format, and directly perform dynamic programming computations (e.g., value iteration, policy iteration) in this format. Under certain technical assumptions, the new algorithms guarantee convergence towards optimal solutions with arbitrary precision. Furthermore, the run times of the new algorithms scale polynomially with the state dimension and polynomially with the ranks of the value function. This approach realizes substantial computational savings in "compressible" problem instances, where value functions admit low-rank approximations. We demonstrate the new algorithms in a wide range of problems, including a simulated six-dimensional agile quadcopter maneuvering example and a seven-dimensional aircraft perching example. In some of these examples, we estimate computational savings of up to ten orders of magnitude over standard value iteration algorithms. We further demonstrate the algorithms running in real time on board a quadcopter during a flight experiment under motion capture.
Sequential Bayesian optimal experimental design via approximate dynamic programming
Apr 28, 2016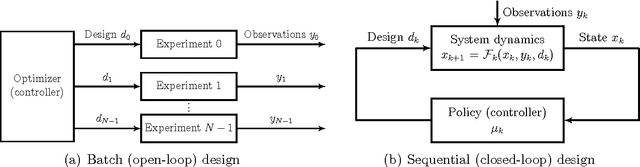
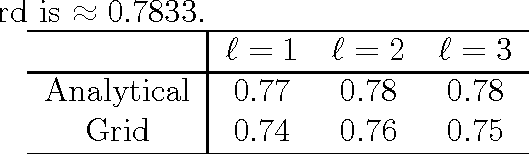

The design of multiple experiments is commonly undertaken via suboptimal strategies, such as batch (open-loop) design that omits feedback or greedy (myopic) design that does not account for future effects. This paper introduces new strategies for the optimal design of sequential experiments. First, we rigorously formulate the general sequential optimal experimental design (sOED) problem as a dynamic program. Batch and greedy designs are shown to result from special cases of this formulation. We then focus on sOED for parameter inference, adopting a Bayesian formulation with an information theoretic design objective. To make the problem tractable, we develop new numerical approaches for nonlinear design with continuous parameter, design, and observation spaces. We approximate the optimal policy by using backward induction with regression to construct and refine value function approximations in the dynamic program. The proposed algorithm iteratively generates trajectories via exploration and exploitation to improve approximation accuracy in frequently visited regions of the state space. Numerical results are verified against analytical solutions in a linear-Gaussian setting. Advantages over batch and greedy design are then demonstrated on a nonlinear source inversion problem where we seek an optimal policy for sequential sensing.
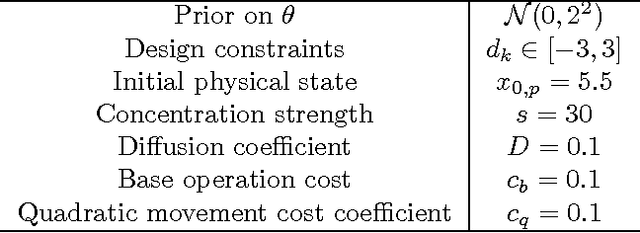
Simulation-based optimal Bayesian experimental design for nonlinear systems
Nov 30, 2012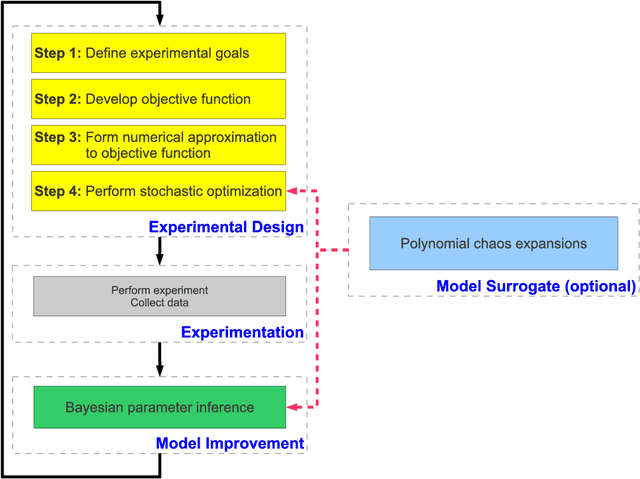

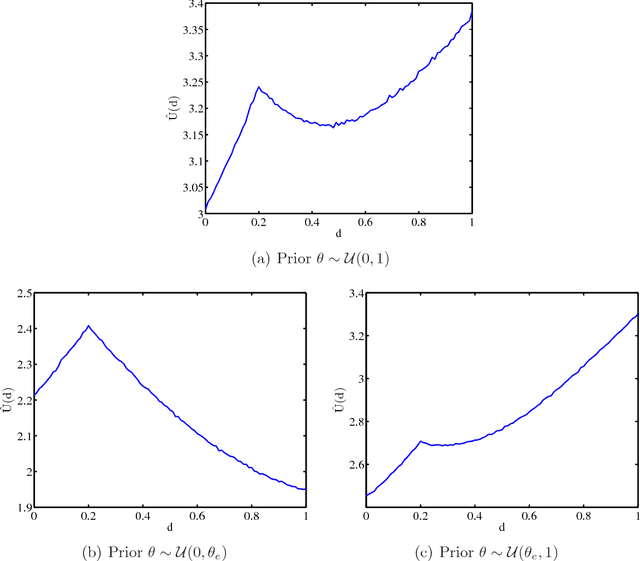
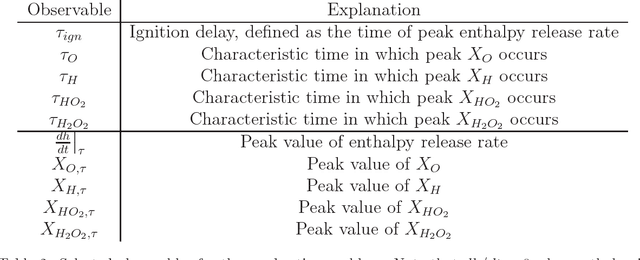
The optimal selection of experimental conditions is essential to maximizing the value of data for inference and prediction, particularly in situations where experiments are time-consuming and expensive to conduct. We propose a general mathematical framework and an algorithmic approach for optimal experimental design with nonlinear simulation-based models; in particular, we focus on finding sets of experiments that provide the most information about targeted sets of parameters. Our framework employs a Bayesian statistical setting, which provides a foundation for inference from noisy, indirect, and incomplete data, and a natural mechanism for incorporating heterogeneous sources of information. An objective function is constructed from information theoretic measures, reflecting expected information gain from proposed combinations of experiments. Polynomial chaos approximations and a two-stage Monte Carlo sampling method are used to evaluate the expected information gain. Stochastic approximation algorithms are then used to make optimization feasible in computationally intensive and high-dimensional settings. These algorithms are demonstrated on model problems and on nonlinear parameter estimation problems arising in detailed combustion kinetics.
* Preprint 53 pages, 17 figures (54 small figures). v1 submitted to the Journal of Computational Physics on August 4, 2011; v2 submitted on August 12, 2012. v2 changes: (a) addition of Appendix B and Figure 17 to address the bias in the expected utility estimator; (b) minor language edits; v3 submitted on November 30, 2012. v3 changes: minor edits