 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmart-Infinity: Fast Large Language Model Training using Near-Storage Processing on a Real System
Mar 11, 2024



The recent huge advance of Large Language Models (LLMs) is mainly driven by the increase in the number of parameters. This has led to substantial memory capacity requirements, necessitating the use of dozens of GPUs just to meet the capacity. One popular solution to this is storage-offloaded training, which uses host memory and storage as an extended memory hierarchy. However, this obviously comes at the cost of storage bandwidth bottleneck because storage devices have orders of magnitude lower bandwidth compared to that of GPU device memories. Our work, Smart-Infinity, addresses the storage bandwidth bottleneck of storage-offloaded LLM training using near-storage processing devices on a real system. The main component of Smart-Infinity is SmartUpdate, which performs parameter updates on custom near-storage accelerators. We identify that moving parameter updates to the storage side removes most of the storage traffic. In addition, we propose an efficient data transfer handler structure to address the system integration issues for Smart-Infinity. The handler allows overlapping data transfers with fixed memory consumption by reusing the device buffer. Lastly, we propose accelerator-assisted gradient compression/decompression to enhance the scalability of Smart-Infinity. When scaling to multiple near-storage processing devices, the write traffic on the shared channel becomes the bottleneck. To alleviate this, we compress the gradients on the GPU and decompress them on the accelerators. It provides further acceleration from reduced traffic. As a result, Smart-Infinity achieves a significant speedup compared to the baseline. Notably, Smart-Infinity is a ready-to-use approach that is fully integrated into PyTorch on a real system. We will open-source Smart-Infinity to facilitate its use.
GraNNDis: Efficient Unified Distributed Training Framework for Deep GNNs on Large Clusters
Nov 12, 2023



Graph neural networks (GNNs) are one of the most rapidly growing fields within deep learning. According to the growth in the dataset and the model size used for GNNs, an important problem is that it becomes nearly impossible to keep the whole network on GPU memory. Among numerous attempts, distributed training is one popular approach to address the problem. However, due to the nature of GNNs, existing distributed approaches suffer from poor scalability, mainly due to the slow external server communications. In this paper, we propose GraNNDis, an efficient distributed GNN training framework for training GNNs on large graphs and deep layers. GraNNDis introduces three new techniques. First, shared preloading provides a training structure for a cluster of multi-GPU servers. We suggest server-wise preloading of essential vertex dependencies to reduce the low-bandwidth external server communications. Second, we present expansion-aware sampling. Because shared preloading alone has limitations because of the neighbor explosion, expansion-aware sampling reduces vertex dependencies that span across server boundaries. Third, we propose cooperative batching to create a unified framework for full-graph and minibatch training. It significantly reduces redundant memory usage in mini-batch training. From this, GraNNDis enables a reasonable trade-off between full-graph and mini-batch training through unification especially when the entire graph does not fit into the GPU memory. With experiments conducted on a multi-server/multi-GPU cluster, we show that GraNNDis provides superior speedup over the state-of-the-art distributed GNN training frameworks.
Pipe-BD: Pipelined Parallel Blockwise Distillation
Jan 29, 2023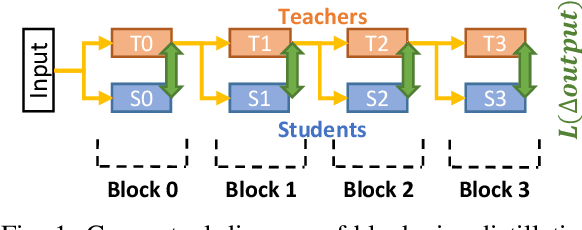
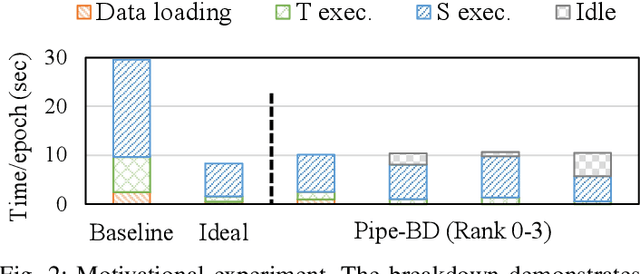
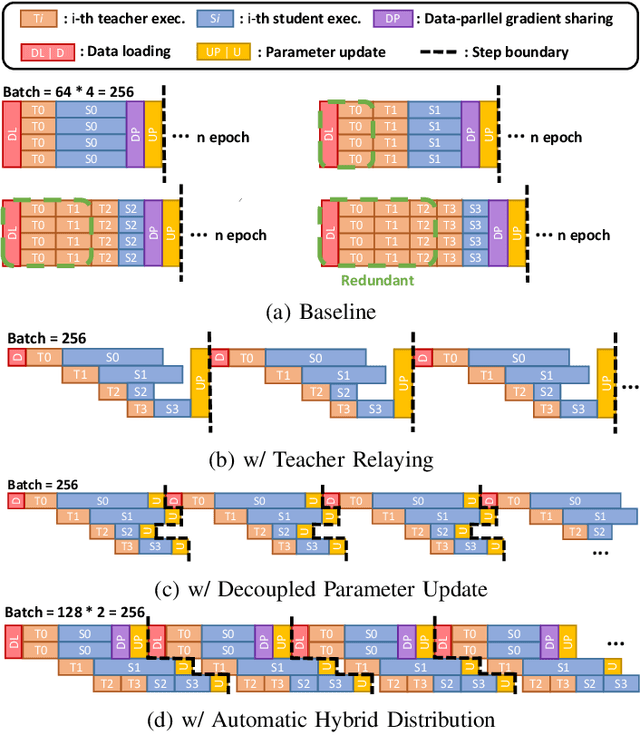
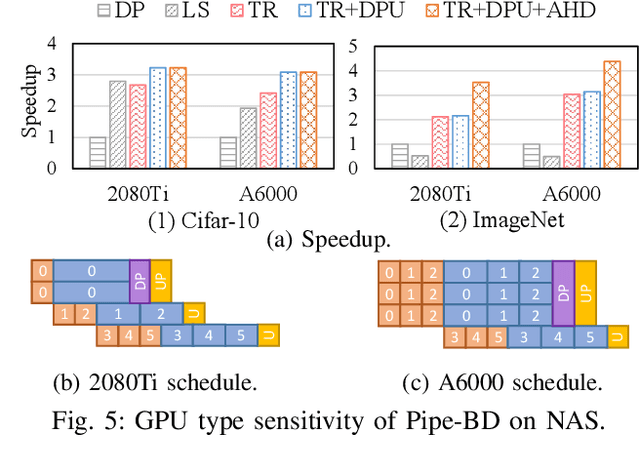
Training large deep neural network models is highly challenging due to their tremendous computational and memory requirements. Blockwise distillation provides one promising method towards faster convergence by splitting a large model into multiple smaller models. In state-of-the-art blockwise distillation methods, training is performed block-by-block in a data-parallel manner using multiple GPUs. To produce inputs for the student blocks, the teacher model is executed from the beginning until the current block under training. However, this results in a high overhead of redundant teacher execution, low GPU utilization, and extra data loading. To address these problems, we propose Pipe-BD, a novel parallelization method for blockwise distillation. Pipe-BD aggressively utilizes pipeline parallelism for blockwise distillation, eliminating redundant teacher block execution and increasing per-device batch size for better resource utilization. We also extend to hybrid parallelism for efficient workload balancing. As a result, Pipe-BD achieves significant acceleration without modifying the mathematical formulation of blockwise distillation. We implement Pipe-BD on PyTorch, and experiments reveal that Pipe-BD is effective on multiple scenarios, models, and datasets.
SGCN: Exploiting Compressed-Sparse Features in Deep Graph Convolutional Network Accelerators
Jan 25, 2023
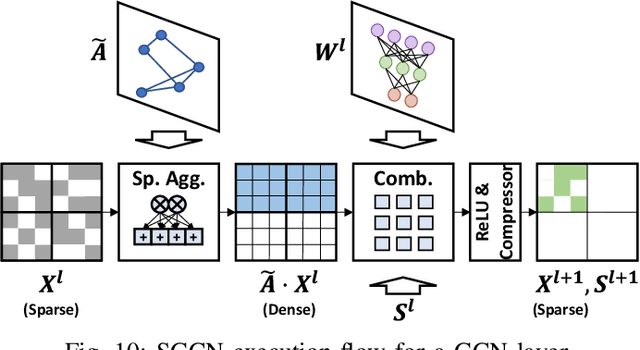


Graph convolutional networks (GCNs) are becoming increasingly popular as they overcome the limited applicability of prior neural networks. A GCN takes as input an arbitrarily structured graph and executes a series of layers which exploit the graph's structure to calculate their output features. One recent trend in GCNs is the use of deep network architectures. As opposed to the traditional GCNs which only span around two to five layers deep, modern GCNs now incorporate tens to hundreds of layers with the help of residual connections. From such deep GCNs, we find an important characteristic that they exhibit very high intermediate feature sparsity. We observe that with deep layers and residual connections, the number of zeros in the intermediate features sharply increases. This reveals a new opportunity for accelerators to exploit in GCN executions that was previously not present. In this paper, we propose SGCN, a fast and energy-efficient GCN accelerator which fully exploits the sparse intermediate features of modern GCNs. SGCN suggests several techniques to achieve significantly higher performance and energy efficiency than the existing accelerators. First, SGCN employs a GCN-friendly feature compression format. We focus on reducing the off-chip memory traffic, which often is the bottleneck for GCN executions. Second, we propose microarchitectures for seamlessly handling the compressed feature format. Third, to better handle locality in the existence of the varying sparsity, SGCN employs sparsity-aware cooperation. Sparsity-aware cooperation creates a pattern that exhibits multiple reuse windows, such that the cache can capture diverse sizes of working sets and therefore adapt to the varying level of sparsity. We show that SGCN achieves 1.71x speedup and 43.9% higher energy efficiency compared to the existing accelerators.
Optimus-CC: Efficient Large NLP Model Training with 3D Parallelism Aware Communication Compression
Jan 24, 2023



In training of modern large natural language processing (NLP) models, it has become a common practice to split models using 3D parallelism to multiple GPUs. Such technique, however, suffers from a high overhead of inter-node communication. Compressing the communication is one way to mitigate the overhead by reducing the inter-node traffic volume; however, the existing compression techniques have critical limitations to be applied for NLP models with 3D parallelism in that 1) only the data parallelism traffic is targeted, and 2) the existing compression schemes already harm the model quality too much. In this paper, we present Optimus-CC, a fast and scalable distributed training framework for large NLP models with aggressive communication compression. Optimus-CC differs from existing communication compression frameworks in the following ways: First, we compress pipeline parallel (inter-stage) traffic. In specific, we compress the inter-stage backpropagation and the embedding synchronization in addition to the existing data-parallel traffic compression methods. Second, we propose techniques to avoid the model quality drop that comes from the compression. We further provide mathematical and empirical analyses to show that our techniques can successfully suppress the compression error. Lastly, we analyze the pipeline and opt to selectively compress those traffic lying on the critical path. This further helps reduce the compression error. We demonstrate our solution on a GPU cluster, and achieve superior speedup from the baseline state-of-the-art solutions for distributed training without sacrificing the model quality.
Slice-and-Forge: Making Better Use of Caches for Graph Convolutional Network Accelerators
Jan 24, 2023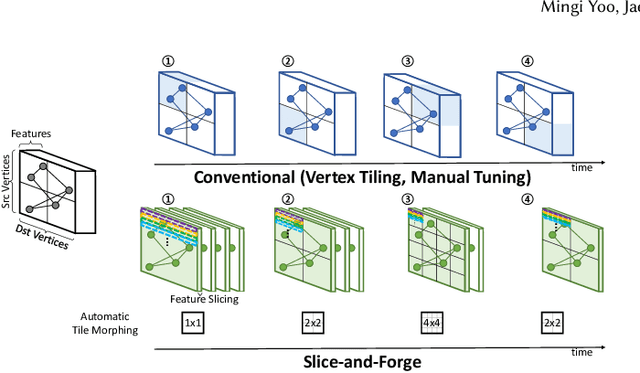

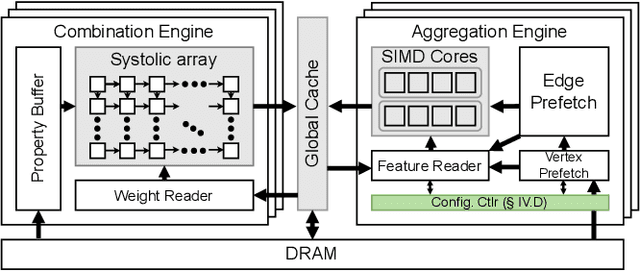

Graph convolutional networks (GCNs) are becoming increasingly popular as they can process a wide variety of data formats that prior deep neural networks cannot easily support. One key challenge in designing hardware accelerators for GCNs is the vast size and randomness in their data access patterns which greatly reduces the effectiveness of the limited on-chip cache. Aimed at improving the effectiveness of the cache by mitigating the irregular data accesses, prior studies often employ the vertex tiling techniques used in traditional graph processing applications. While being effective at enhancing the cache efficiency, those approaches are often sensitive to the tiling configurations where the optimal setting heavily depends on target input datasets. Furthermore, the existing solutions require manual tuning through trial-and-error or rely on sub-optimal analytical models. In this paper, we propose Slice-and-Forge (SnF), an efficient hardware accelerator for GCNs which greatly improves the effectiveness of the limited on-chip cache. SnF chooses a tiling strategy named feature slicing that splits the features into vertical slices and processes them in the outermost loop of the execution. This particular choice results in a repetition of the identical computational patterns over irregular graph data over multiple rounds. Taking advantage of such repetitions, SnF dynamically tunes its tile size. Our experimental results reveal that SnF can achieve 1.73x higher performance in geomean compared to prior work on multi-engine settings, and 1.46x higher performance in geomean on small scale settings, without the need for off-line analyses.
Enabling Hard Constraints in Differentiable Neural Network and Accelerator Co-Exploration
Jan 23, 2023Co-exploration of an optimal neural architecture and its hardware accelerator is an approach of rising interest which addresses the computational cost problem, especially in low-profile systems. The large co-exploration space is often handled by adopting the idea of differentiable neural architecture search. However, despite the superior search efficiency of the differentiable co-exploration, it faces a critical challenge of not being able to systematically satisfy hard constraints such as frame rate. To handle the hard constraint problem of differentiable co-exploration, we propose HDX, which searches for hard-constrained solutions without compromising the global design objectives. By manipulating the gradients in the interest of the given hard constraint, high-quality solutions satisfying the constraint can be obtained.
It's All In the Teacher: Zero-Shot Quantization Brought Closer to the Teacher
Apr 01, 2022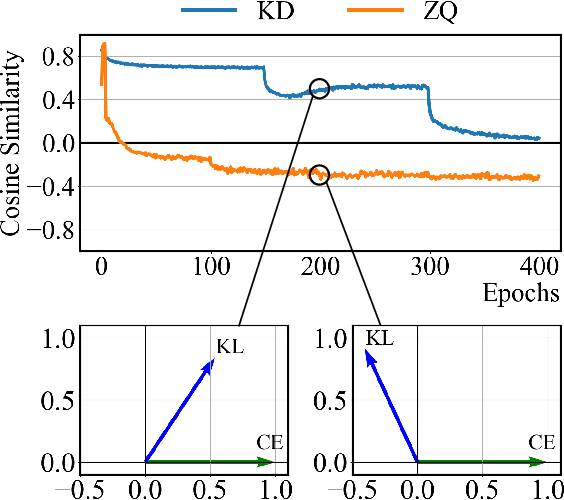
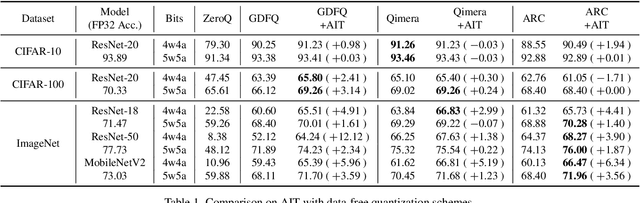
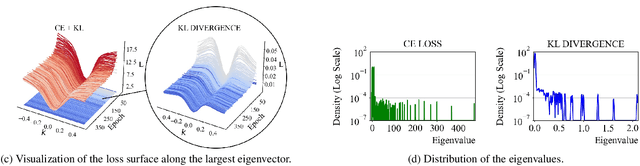
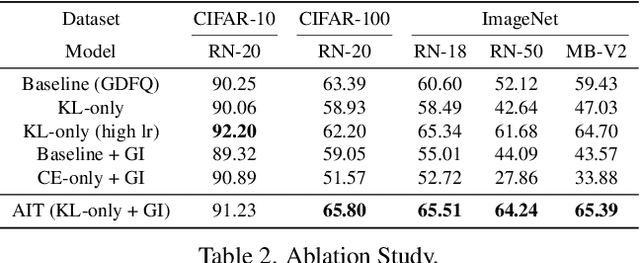
Model quantization is considered as a promising method to greatly reduce the resource requirements of deep neural networks. To deal with the performance drop induced by quantization errors, a popular method is to use training data to fine-tune quantized networks. In real-world environments, however, such a method is frequently infeasible because training data is unavailable due to security, privacy, or confidentiality concerns. Zero-shot quantization addresses such problems, usually by taking information from the weights of a full-precision teacher network to compensate the performance drop of the quantized networks. In this paper, we first analyze the loss surface of state-of-the-art zero-shot quantization techniques and provide several findings. In contrast to usual knowledge distillation problems, zero-shot quantization often suffers from 1) the difficulty of optimizing multiple loss terms together, and 2) the poor generalization capability due to the use of synthetic samples. Furthermore, we observe that many weights fail to cross the rounding threshold during training the quantized networks even when it is necessary to do so for better performance. Based on the observations, we propose AIT, a simple yet powerful technique for zero-shot quantization, which addresses the aforementioned two problems in the following way: AIT i) uses a KL distance loss only without a cross-entropy loss, and ii) manipulates gradients to guarantee that a certain portion of weights are properly updated after crossing the rounding thresholds. Experiments show that AIT outperforms the performance of many existing methods by a great margin, taking over the overall state-of-the-art position in the field.
Qimera: Data-free Quantization with Synthetic Boundary Supporting Samples
Nov 04, 2021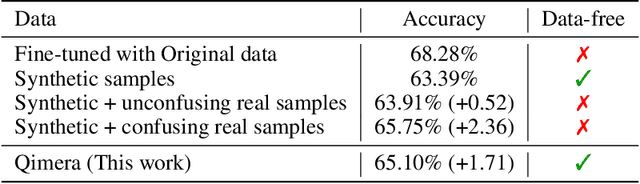
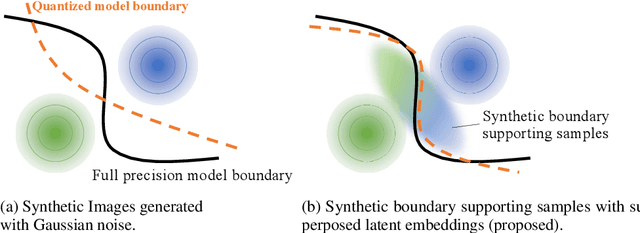
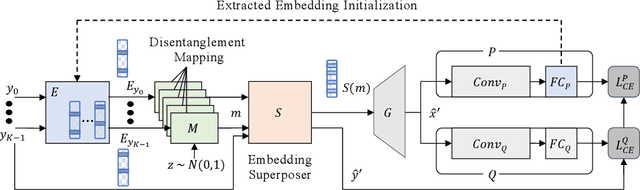
Model quantization is known as a promising method to compress deep neural networks, especially for inferences on lightweight mobile or edge devices. However, model quantization usually requires access to the original training data to maintain the accuracy of the full-precision models, which is often infeasible in real-world scenarios for security and privacy issues. A popular approach to perform quantization without access to the original data is to use synthetically generated samples, based on batch-normalization statistics or adversarial learning. However, the drawback of such approaches is that they primarily rely on random noise input to the generator to attain diversity of the synthetic samples. We find that this is often insufficient to capture the distribution of the original data, especially around the decision boundaries. To this end, we propose Qimera, a method that uses superposed latent embeddings to generate synthetic boundary supporting samples. For the superposed embeddings to better reflect the original distribution, we also propose using an additional disentanglement mapping layer and extracting information from the full-precision model. The experimental results show that Qimera achieves state-of-the-art performances for various settings on data-free quantization. Code is available at https://github.com/iamkanghyunchoi/qimera.
DANCE: Differentiable Accelerator/Network Co-Exploration
Sep 14, 2020

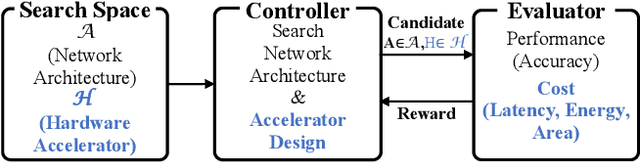

To cope with the ever-increasing computational demand of the DNN execution, recent neural architecture search (NAS) algorithms consider hardware cost metrics into account, such as GPU latency. To further pursue a fast, efficient execution, DNN-specialized hardware accelerators are being designed for multiple purposes, which far-exceeds the efficiency of the GPUs. However, those hardware-related metrics have been proven to exhibit non-linear relationships with the network architectures. Therefore it became a chicken-and-egg problem to optimize the network against the accelerator, or to optimize the accelerator against the network. In such circumstances, this work presents DANCE, a differentiable approach towards the co-exploration of the hardware accelerator and network architecture design. At the heart of DANCE is a differentiable evaluator network. By modeling the hardware evaluation software with a neural network, the relation between the accelerator architecture and the hardware metrics becomes differentiable, allowing the search to be performed with backpropagation. Compared to the naive existing approaches, our method performs co-exploration in a significantly shorter time, while achieving superior accuracy and hardware cost metrics.