 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTriDeliver: Cooperative Air-Ground Instant Delivery with UAVs, Couriers, and Crowdsourced Ground Vehicles
Apr 14, 2026Instant delivery, shipping items before critical deadlines, is essential in daily life. While multiple delivery agents, such as couriers, Unmanned Aerial Vehicles (UAVs), and crowdsourced agents, have been widely employed, each of them faces inherent limitations (e.g., low efficiency/labor shortages, flight control, and dynamic capabilities, respectively), preventing them from meeting the surging demands alone. This paper proposes TriDeliver, the first hierarchical cooperative framework, integrating human couriers, UAVs, and crowdsourced ground vehicles (GVs) for efficient instant delivery. To obtain the initial scheduling knowledge for GVs and UAVs as well as improve the cooperative delivery performance, we design a Transfer Learning (TL)-based algorithm to extract delivery knowledge from couriers' behavioral history and transfer their knowledge to UAVs and GVs with fine-tunings, which is then used to dispatch parcels for efficient delivery. Evaluated on one-month real-world trajectory and delivery datasets, it has been demonstrated that 1) by integrating couriers, UAVs, and crowdsourced GVs, TriDeliver reduces the delivery cost by $65.8\%$ versus state-of-the-art cooperative delivery by UAVs and couriers; 2) TriDeliver achieves further improvements in terms of delivery time ($-17.7\%$), delivery cost ($-9.8\%$), and impacts on original tasks of crowdsourced GVs ($-43.6\%$), even with the representation of the transferred knowledge by simple neural networks, respectively.
Aggregation Alignment for Federated Learning with Mixture-of-Experts under Data Heterogeneity
Mar 22, 2026Large language models (LLMs) increasingly adopt Mixture-of-Experts (MoE) architectures to scale model capacity while reducing computation. Fine-tuning these MoE-based LLMs often requires access to distributed and privacy-sensitive data, making centralized fine-tuning impractical. Federated learning (FL) therefore provides a paradigm to collaboratively fine-tune MoE-based LLMs, enabling each client to integrate diverse knowledge without compromising data privacy. However, the integration of MoE-based LLM fine-tuning into FL encounters two critical aggregation challenges due to inherent data heterogeneity across clients: (i) divergent local data distributions drive clients to develop distinct gating preference for localized expert selection, causing direct parameter aggregation to produce a ``one-size-fits-none'' global gating network, and (ii) same-indexed experts develop disparate semantic roles across clients, leading to expert semantic blurring and the degradation of expert specialization. To address these challenges, we propose FedAlign-MoE, a federated aggregation alignment framework that jointly enforces routing consistency and expert semantic alignment. Specifically, FedAlign-MoE aggregates gating behaviors by aligning routing distributions through consistency weighting and optimizes local gating networks through distribution regularization, maintaining cross-client stability without overriding discriminative local preferences. Meanwhile, FedAlign-MoE explicitly quantifies semantic consistency among same-indexed experts across clients and selectively aggregates updates from semantically aligned clients, ensuring stable and specialized functional roles for global experts. Extensive experiments demonstrate that FedAlign-MoE outperforms state-of-the-art benchmarks, achieving faster convergence and superior accuracy in non-IID federated environments.
HFedMoE: Resource-aware Heterogeneous Federated Learning with Mixture-of-Experts
Jan 02, 2026While federated learning (FL) enables fine-tuning of large language models (LLMs) without compromising data privacy, the substantial size of an LLM renders on-device training impractical for resource-constrained clients, such as mobile devices. Thus, Mixture-of-Experts (MoE) models have emerged as a computation-efficient solution, which activates only a sparse subset of experts during model training to reduce computing burden without sacrificing performance. Though integrating MoE into FL fine-tuning holds significant potential, it still encounters three key challenges: i) selecting appropriate experts for clients remains challenging due to the lack of a reliable metric to measure each expert's impact on local fine-tuning performance, ii) the heterogeneous computing resources across clients severely hinder MoE-based LLM fine-tuning, as dynamic expert activations across diverse input samples can overwhelm resource-constrained devices, and iii) client-specific expert subsets and routing preference undermine global aggregation, where misaligned expert updates and inconsistent gating networks in troduce destructive interference. To address these challenges, we propose HFedMoE, a heterogeneous MoE-based FL fine-tuning framework that customizes a subset of experts to each client for computation-efficient LLM fine-tuning. Specifically, HFedMoE identifies the expert importance based on its contributions to fine-tuning performance, and then adaptively selects a subset of experts from an information bottleneck perspective to align with each client' s computing budget. A sparsity-aware model aggregation strategy is also designed to aggregate the actively fine-tuned experts and gating parameters with importance weighted contributions. Extensive experiments demonstrate that HFedMoE outperforms state-of-the-art benchmarks in training accuracy and convergence speed.
Dynamic Uncertainty-aware Multimodal Fusion for Outdoor Health Monitoring
Aug 12, 2025Outdoor health monitoring is essential to detect early abnormal health status for safeguarding human health and safety. Conventional outdoor monitoring relies on static multimodal deep learning frameworks, which requires extensive data training from scratch and fails to capture subtle health status changes. Multimodal large language models (MLLMs) emerge as a promising alternative, utilizing only small datasets to fine-tune pre-trained information-rich models for enabling powerful health status monitoring. Unfortunately, MLLM-based outdoor health monitoring also faces significant challenges: I) sensor data contains input noise stemming from sensor data acquisition and fluctuation noise caused by sudden changes in physiological signals due to dynamic outdoor environments, thus degrading the training performance; ii) current transformer based MLLMs struggle to achieve robust multimodal fusion, as they lack a design for fusing the noisy modality; iii) modalities with varying noise levels hinder accurate recovery of missing data from fluctuating distributions. To combat these challenges, we propose an uncertainty-aware multimodal fusion framework, named DUAL-Health, for outdoor health monitoring in dynamic and noisy environments. First, to assess the impact of noise, we accurately quantify modality uncertainty caused by input and fluctuation noise with current and temporal features. Second, to empower efficient muitimodal fusion with low-quality modalities,we customize the fusion weight for each modality based on quantified and calibrated uncertainty. Third, to enhance data recovery from fluctuating noisy modalities, we align modality distributions within a common semantic space. Extensive experiments demonstrate that our DUAL-Health outperforms state-of-the-art baselines in detection accuracy and robustness.
Task-Oriented Communications for Visual Navigation with Edge-Aerial Collaboration in Low Altitude Economy
Apr 29, 2025To support the Low Altitude Economy (LAE), precise unmanned aerial vehicles (UAVs) localization in urban areas where global positioning system (GPS) signals are unavailable. Vision-based methods offer a viable alternative but face severe bandwidth, memory and processing constraints on lightweight UAVs. Inspired by mammalian spatial cognition, we propose a task-oriented communication framework, where UAVs equipped with multi-camera systems extract compact multi-view features and offload localization tasks to edge servers. We introduce the Orthogonally-constrained Variational Information Bottleneck encoder (O-VIB), which incorporates automatic relevance determination (ARD) to prune non-informative features while enforcing orthogonality to minimize redundancy. This enables efficient and accurate localization with minimal transmission cost. Extensive evaluation on a dedicated LAE UAV dataset shows that O-VIB achieves high-precision localization under stringent bandwidth budgets. Code and dataset will be made publicly available: github.com/fangzr/TOC-Edge-Aerial.
CP-Guard+: A New Paradigm for Malicious Agent Detection and Defense in Collaborative Perception
Feb 07, 2025Collaborative perception (CP) is a promising method for safe connected and autonomous driving, which enables multiple vehicles to share sensing information to enhance perception performance. However, compared with single-vehicle perception, the openness of a CP system makes it more vulnerable to malicious attacks that can inject malicious information to mislead the perception of an ego vehicle, resulting in severe risks for safe driving. To mitigate such vulnerability, we first propose a new paradigm for malicious agent detection that effectively identifies malicious agents at the feature level without requiring verification of final perception results, significantly reducing computational overhead. Building on this paradigm, we introduce CP-GuardBench, the first comprehensive dataset provided to train and evaluate various malicious agent detection methods for CP systems. Furthermore, we develop a robust defense method called CP-Guard+, which enhances the margin between the representations of benign and malicious features through a carefully designed Dual-Centered Contrastive Loss (DCCLoss). Finally, we conduct extensive experiments on both CP-GuardBench and V2X-Sim, and demonstrate the superiority of CP-Guard+.
CP-Guard: Malicious Agent Detection and Defense in Collaborative Bird's Eye View Perception
Dec 16, 2024Collaborative Perception (CP) has shown a promising technique for autonomous driving, where multiple connected and autonomous vehicles (CAVs) share their perception information to enhance the overall perception performance and expand the perception range. However, in CP, ego CAV needs to receive messages from its collaborators, which makes it easy to be attacked by malicious agents. For example, a malicious agent can send harmful information to the ego CAV to mislead it. To address this critical issue, we propose a novel method, \textbf{CP-Guard}, a tailored defense mechanism for CP that can be deployed by each agent to accurately detect and eliminate malicious agents in its collaboration network. Our key idea is to enable CP to reach a consensus rather than a conflict against the ego CAV's perception results. Based on this idea, we first develop a probability-agnostic sample consensus (PASAC) method to effectively sample a subset of the collaborators and verify the consensus without prior probabilities of malicious agents. Furthermore, we define a collaborative consistency loss (CCLoss) to capture the discrepancy between the ego CAV and its collaborators, which is used as a verification criterion for consensus. Finally, we conduct extensive experiments in collaborative bird's eye view (BEV) tasks and our results demonstrate the effectiveness of our CP-Guard.
IC3M: In-Car Multimodal Multi-object Monitoring for Abnormal Status of Both Driver and Passengers
Oct 03, 2024Recently, in-car monitoring has emerged as a promising technology for detecting early-stage abnormal status of the driver and providing timely alerts to prevent traffic accidents. Although training models with multimodal data enhances the reliability of abnormal status detection, the scarcity of labeled data and the imbalance of class distribution impede the extraction of critical abnormal state features, significantly deteriorating training performance. Furthermore, missing modalities due to environment and hardware limitations further exacerbate the challenge of abnormal status identification. More importantly, monitoring abnormal health conditions of passengers, particularly in elderly care, is of paramount importance but remains underexplored. To address these challenges, we introduce our IC3M, an efficient camera-rotation-based multimodal framework for monitoring both driver and passengers in a car. Our IC3M comprises two key modules: an adaptive threshold pseudo-labeling strategy and a missing modality reconstruction. The former customizes pseudo-labeling thresholds for different classes based on the class distribution, generating class-balanced pseudo labels to guide model training effectively, while the latter leverages crossmodality relationships learned from limited labels to accurately recover missing modalities by distribution transferring from available modalities. Extensive experimental results demonstrate that IC3M outperforms state-of-the-art benchmarks in accuracy, precision, and recall while exhibiting superior robustness under limited labeled data and severe missing modality.
AgentsCoMerge: Large Language Model Empowered Collaborative Decision Making for Ramp Merging
Aug 07, 2024Ramp merging is one of the bottlenecks in traffic systems, which commonly cause traffic congestion, accidents, and severe carbon emissions. In order to address this essential issue and enhance the safety and efficiency of connected and autonomous vehicles (CAVs) at multi-lane merging zones, we propose a novel collaborative decision-making framework, named AgentsCoMerge, to leverage large language models (LLMs). Specifically, we first design a scene observation and understanding module to allow an agent to capture the traffic environment. Then we propose a hierarchical planning module to enable the agent to make decisions and plan trajectories based on the observation and the agent's own state. In addition, in order to facilitate collaboration among multiple agents, we introduce a communication module to enable the surrounding agents to exchange necessary information and coordinate their actions. Finally, we develop a reinforcement reflection guided training paradigm to further enhance the decision-making capability of the framework. Extensive experiments are conducted to evaluate the performance of our proposed method, demonstrating its superior efficiency and effectiveness for multi-agent collaborative decision-making under various ramp merging scenarios.
ESFL: Efficient Split Federated Learning over Resource-Constrained Heterogeneous Wireless Devices
Feb 24, 2024


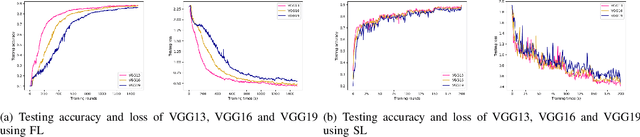
Federated learning (FL) allows multiple parties (distributed devices) to train a machine learning model without sharing raw data. How to effectively and efficiently utilize the resources on devices and the central server is a highly interesting yet challenging problem. In this paper, we propose an efficient split federated learning algorithm (ESFL) to take full advantage of the powerful computing capabilities at a central server under a split federated learning framework with heterogeneous end devices (EDs). By splitting the model into different submodels between the server and EDs, our approach jointly optimizes user-side workload and server-side computing resource allocation by considering users' heterogeneity. We formulate the whole optimization problem as a mixed-integer non-linear program, which is an NP-hard problem, and develop an iterative approach to obtain an approximate solution efficiently. Extensive simulations have been conducted to validate the significantly increased efficiency of our ESFL approach compared with standard federated learning, split learning, and splitfed learning.