 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagneton: Optimizing Energy Efficiency of ML Systems via Differential Energy Debugging
Dec 09, 2025The training and deployment of machine learning (ML) models have become extremely energy-intensive. While existing optimization efforts focus primarily on hardware energy efficiency, a significant but overlooked source of inefficiency is software energy waste caused by poor software design. This often includes redundant or poorly designed operations that consume more energy without improving performance. These inefficiencies arise in widely used ML frameworks and applications, yet developers often lack the visibility and tools to detect and diagnose them. We propose differential energy debugging, a novel approach that leverages the observation that competing ML systems often implement similar functionality with vastly different energy consumption. Building on this insight, we design and implement Magneton, an energy profiler that compares energy consumption between similar ML systems at the operator level and automatically pinpoints code regions and configuration choices responsible for excessive energy use. Applied to 9 popular ML systems spanning LLM inference, general ML frameworks, and image generation, Magneton detects and diagnoses 16 known cases of software energy inefficiency and further discovers 8 previously unknown cases, 7 of which have been confirmed by developers.
CSRAP: Enhanced Canvas Attention Scheduling for Real-Time Mission Critical Perception
Aug 07, 2025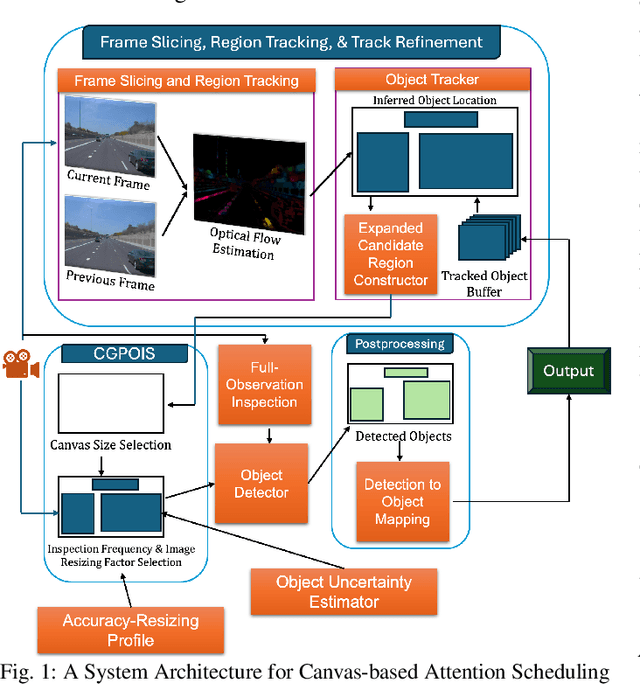
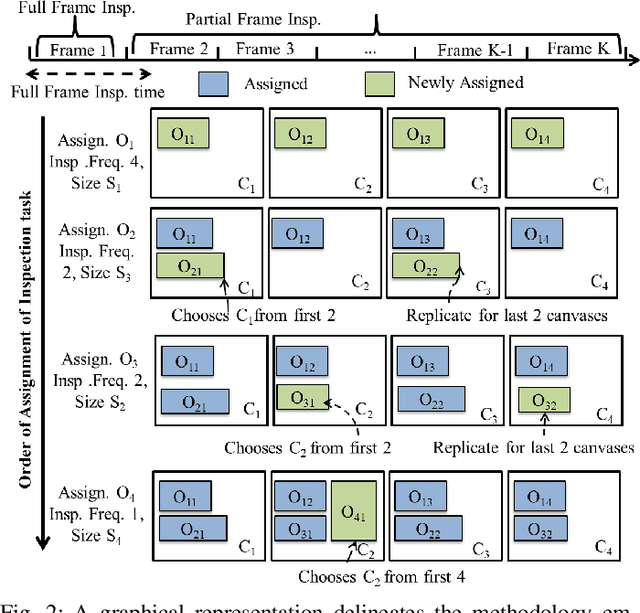
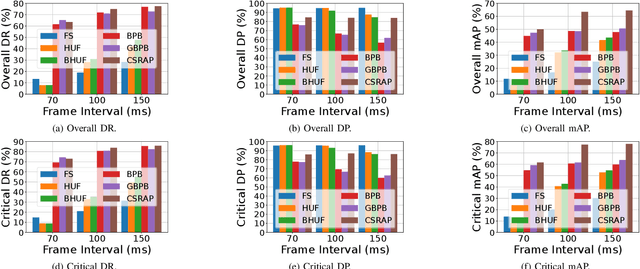
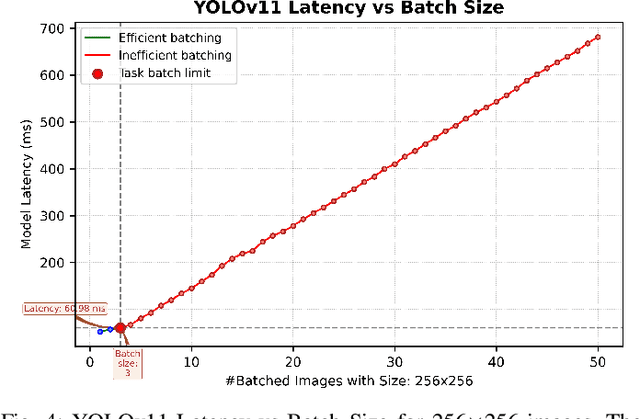
Real-time perception on edge platforms faces a core challenge: executing high-resolution object detection under stringent latency constraints on limited computing resources. Canvas-based attention scheduling was proposed in earlier work as a mechanism to reduce the resource demands of perception subsystems. It consolidates areas of interest in an input data frame onto a smaller area, called a canvas frame, that can be processed at the requisite frame rate. This paper extends prior canvas-based attention scheduling literature by (i) allowing for variable-size canvas frames and (ii) employing selectable canvas frame rates that may depart from the original data frame rate. We evaluate our solution by running YOLOv11, as the perception module, on an NVIDIA Jetson Orin Nano to inspect video frames from the Waymo Open Dataset. Our results show that the additional degrees of freedom improve the attainable quality/cost trade-offs, thereby allowing for a consistently higher mean average precision (mAP) and recall with respect to the state of the art.
SPAR: Self-supervised Placement-Aware Representation Learning for Multi-Node IoT Systems
May 22, 2025This work develops the underpinnings of self-supervised placement-aware representation learning given spatially-distributed (multi-view and multimodal) sensor observations, motivated by the need to represent external environmental state in multi-sensor IoT systems in a manner that correctly distills spatial phenomena from the distributed multi-vantage observations. The objective of sensing in IoT systems is, in general, to collectively represent an externally observed environment given multiple vantage points from which sensory observations occur. Pretraining of models that help interpret sensor data must therefore encode the relation between signals observed by sensors and the observers' vantage points in order to attain a representation that encodes the observed spatial phenomena in a manner informed by the specific placement of the measuring instruments, while allowing arbitrary placement. The work significantly advances self-supervised model pretraining from IoT signals beyond current solutions that often overlook the distinctive spatial nature of IoT data. Our framework explicitly learns the dependencies between measurements and geometric observer layouts and structural characteristics, guided by a core design principle: the duality between signals and observer positions. We further provide theoretical analyses from the perspectives of information theory and occlusion-invariant representation learning to offer insight into the rationale behind our design. Experiments on three real-world datasets--covering vehicle monitoring, human activity recognition, and earthquake localization--demonstrate the superior generalizability and robustness of our method across diverse modalities, sensor placements, application-level inference tasks, and spatial scales.
Argos: Agentic Time-Series Anomaly Detection with Autonomous Rule Generation via Large Language Models
Jan 24, 2025



Observability in cloud infrastructure is critical for service providers, driving the widespread adoption of anomaly detection systems for monitoring metrics. However, existing systems often struggle to simultaneously achieve explainability, reproducibility, and autonomy, which are three indispensable properties for production use. We introduce Argos, an agentic system for detecting time-series anomalies in cloud infrastructure by leveraging large language models (LLMs). Argos proposes to use explainable and reproducible anomaly rules as intermediate representation and employs LLMs to autonomously generate such rules. The system will efficiently train error-free and accuracy-guaranteed anomaly rules through multiple collaborative agents and deploy the trained rules for low-cost online anomaly detection. Through evaluation results, we demonstrate that Argos outperforms state-of-the-art methods, increasing $F_1$ scores by up to $9.5\%$ and $28.3\%$ on public anomaly detection datasets and an internal dataset collected from Microsoft, respectively.
On the Efficiency and Robustness of Vibration-based Foundation Models for IoT Sensing: A Case Study
Apr 03, 2024



This paper demonstrates the potential of vibration-based Foundation Models (FMs), pre-trained with unlabeled sensing data, to improve the robustness of run-time inference in (a class of) IoT applications. A case study is presented featuring a vehicle classification application using acoustic and seismic sensing. The work is motivated by the success of foundation models in the areas of natural language processing and computer vision, leading to generalizations of the FM concept to other domains as well, where significant amounts of unlabeled data exist that can be used for self-supervised pre-training. One such domain is IoT applications. Foundation models for selected sensing modalities in the IoT domain can be pre-trained in an environment-agnostic fashion using available unlabeled sensor data and then fine-tuned to the deployment at hand using a small amount of labeled data. The paper shows that the pre-training/fine-tuning approach improves the robustness of downstream inference and facilitates adaptation to different environmental conditions. More specifically, we present a case study in a real-world setting to evaluate a simple (vibration-based) FM-like model, called FOCAL, demonstrating its superior robustness and adaptation, compared to conventional supervised deep neural networks (DNNs). We also demonstrate its superior convergence over supervised solutions. Our findings highlight the advantages of vibration-based FMs (and FM-inspired selfsupervised models in general) in terms of inference robustness, runtime efficiency, and model adaptation (via fine-tuning) in resource-limited IoT settings.