 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriveLiDAR4D: Sequential and Controllable LiDAR Scene Generation for Autonomous Driving
Nov 17, 2025The generation of realistic LiDAR point clouds plays a crucial role in the development and evaluation of autonomous driving systems. Although recent methods for 3D LiDAR point cloud generation have shown significant improvements, they still face notable limitations, including the lack of sequential generation capabilities and the inability to produce accurately positioned foreground objects and realistic backgrounds. These shortcomings hinder their practical applicability. In this paper, we introduce DriveLiDAR4D, a novel LiDAR generation pipeline consisting of multimodal conditions and a novel sequential noise prediction model LiDAR4DNet, capable of producing temporally consistent LiDAR scenes with highly controllable foreground objects and realistic backgrounds. To the best of our knowledge, this is the first work to address the sequential generation of LiDAR scenes with full scene manipulation capability in an end-to-end manner. We evaluated DriveLiDAR4D on the nuScenes and KITTI datasets, where we achieved an FRD score of 743.13 and an FVD score of 16.96 on the nuScenes dataset, surpassing the current state-of-the-art (SOTA) method, UniScene, with an performance boost of 37.2% in FRD and 24.1% in FVD, respectively.
DriveAction: A Benchmark for Exploring Human-like Driving Decisions in VLA Models
Jun 06, 2025Vision-Language-Action (VLA) models have advanced autonomous driving, but existing benchmarks still lack scenario diversity, reliable action-level annotation, and evaluation protocols aligned with human preferences. To address these limitations, we introduce DriveAction, the first action-driven benchmark specifically designed for VLA models, comprising 16,185 QA pairs generated from 2,610 driving scenarios. DriveAction leverages real-world driving data proactively collected by users of production-level autonomous vehicles to ensure broad and representative scenario coverage, offers high-level discrete action labels collected directly from users' actual driving operations, and implements an action-rooted tree-structured evaluation framework that explicitly links vision, language, and action tasks, supporting both comprehensive and task-specific assessment. Our experiments demonstrate that state-of-the-art vision-language models (VLMs) require both vision and language guidance for accurate action prediction: on average, accuracy drops by 3.3% without vision input, by 4.1% without language input, and by 8.0% without either. Our evaluation supports precise identification of model bottlenecks with robust and consistent results, thus providing new insights and a rigorous foundation for advancing human-like decisions in autonomous driving.
StyledStreets: Multi-style Street Simulator with Spatial and Temporal Consistency
Mar 27, 2025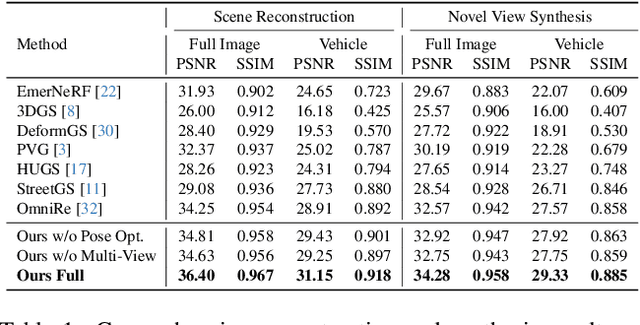
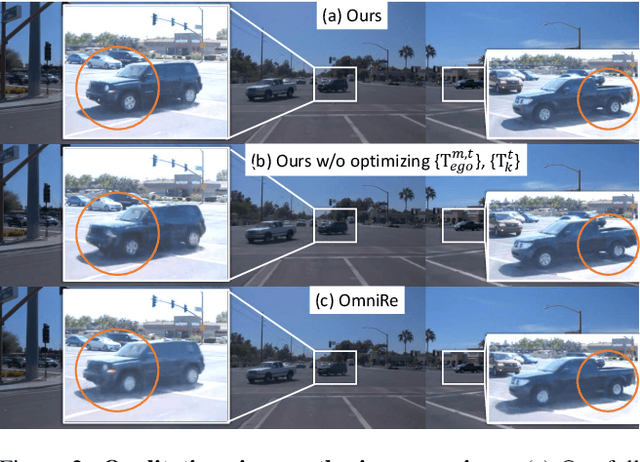
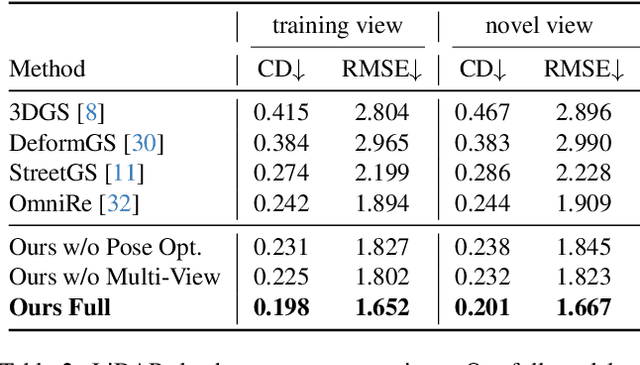
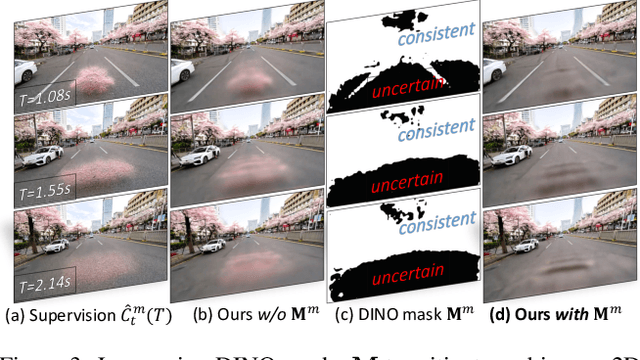
Urban scene reconstruction requires modeling both static infrastructure and dynamic elements while supporting diverse environmental conditions. We present \textbf{StyledStreets}, a multi-style street simulator that achieves instruction-driven scene editing with guaranteed spatial and temporal consistency. Building on a state-of-the-art Gaussian Splatting framework for street scenarios enhanced by our proposed pose optimization and multi-view training, our method enables photorealistic style transfers across seasons, weather conditions, and camera setups through three key innovations: First, a hybrid embedding scheme disentangles persistent scene geometry from transient style attributes, allowing realistic environmental edits while preserving structural integrity. Second, uncertainty-aware rendering mitigates supervision noise from diffusion priors, enabling robust training across extreme style variations. Third, a unified parametric model prevents geometric drift through regularized updates, maintaining multi-view consistency across seven vehicle-mounted cameras. Our framework preserves the original scene's motion patterns and geometric relationships. Qualitative results demonstrate plausible transitions between diverse conditions (snow, sandstorm, night), while quantitative evaluations show state-of-the-art geometric accuracy under style transfers. The approach establishes new capabilities for urban simulation, with applications in autonomous vehicle testing and augmented reality systems requiring reliable environmental consistency. Codes will be publicly available upon publication.
ReconDreamer: Crafting World Models for Driving Scene Reconstruction via Online Restoration
Nov 29, 2024



Closed-loop simulation is crucial for end-to-end autonomous driving. Existing sensor simulation methods (e.g., NeRF and 3DGS) reconstruct driving scenes based on conditions that closely mirror training data distributions. However, these methods struggle with rendering novel trajectories, such as lane changes. Recent works have demonstrated that integrating world model knowledge alleviates these issues. Despite their efficiency, these approaches still encounter difficulties in the accurate representation of more complex maneuvers, with multi-lane shifts being a notable example. Therefore, we introduce ReconDreamer, which enhances driving scene reconstruction through incremental integration of world model knowledge. Specifically, DriveRestorer is proposed to mitigate artifacts via online restoration. This is complemented by a progressive data update strategy designed to ensure high-quality rendering for more complex maneuvers. To the best of our knowledge, ReconDreamer is the first method to effectively render in large maneuvers. Experimental results demonstrate that ReconDreamer outperforms Street Gaussians in the NTA-IoU, NTL-IoU, and FID, with relative improvements by 24.87%, 6.72%, and 29.97%. Furthermore, ReconDreamer surpasses DriveDreamer4D with PVG during large maneuver rendering, as verified by a relative improvement of 195.87% in the NTA-IoU metric and a comprehensive user study.
Identifying Malicious Players in GWAP-based Disaster Monitoring Crowdsourcing System
Sep 14, 2019

Disaster monitoring is challenging due to the lake of infrastructures in monitoring areas. Based on the theory of Game-With-A-Purpose (GWAP), this paper contributes to a novel large-scale crowdsourcing disaster monitoring system. The system analyzes tagged satellite pictures from anonymous players, and then reports aggregated and evaluated monitoring results to its stakeholders. An algorithm based on directed graph centralities is presented to address the core issues of malicious user detection and disaster level calculation. Our method can be easily applied in other human computation systems. In the end, some issues with possible solutions are discussed for our future work.