 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParadigm Shift from Statistical Channel Modeling to Digital Twin Prediction: An Environment-Generalizable ChannelLM for 6G AI-enabled Air Interface
Apr 20, 2026As 6G advances, ubiquitous connectivity and higher capacity requirements of the air interface pose substantial challenges for accurate and real-time wireless channel acquisition in diverse environments. Conventional statistical channel modeling relies on offline measurement data from limited environments, struggling to support online applications facing diverse environments. To this end, the digital twin channel (DTC) has emerged as a novel paradigm that constructs a digital replica of the physical environment through high-fidelity sensing and predicts corresponding channel in real time utilizing artificial intelligence (AI) models. As the engine of DTC, existing AI models struggle to simultaneously achieve strong environmental generalization in real-world and end-to-end channel prediction for real time tasks. Therefore, this paper proposes a channel large model (ChannelLM)-driven DTC architecture comprising three modules: low-complexity and high-accuracy environment reconstruction based on dynamic object detection and multimodal alignment of image and point cloud data, physically interpretable environment feature extraction, and a ChannelLM core to mapping these features into generalized environment representations for multi-task channel prediction. Simulation results demonstrate that, in unseen test environments, compared with small-scale AI models, ChannelLM reduces prediction errors by 4.23 dB in channel state information prediction while achieving an end-to-end inference latency of 70 milliseconds in the real world.
Seeing Eye to Eye: Enabling Cognitive Alignment Through Shared First-Person Perspective in Human-AI Collaboration
Mar 13, 2026Despite advances in multimodal AI, current vision-based assistants often remain inefficient in collaborative tasks. We identify two key gulfs: a communication gulf, where users must translate rich parallel intentions into verbal commands due to the channel mismatch , and an understanding gulf, where AI struggles to interpret subtle embodied cues. To address these, we propose Eye2Eye, a framework that leverages first-person perspective as a channel for human-AI cognitive alignment. It integrates three components: (1) joint attention coordination for fluid focus alignment, (2) revisable memory to maintain evolving common ground, and (3) reflective feedback allowing users to clarify and refine AI's understanding. We implement this framework in an AR prototype and evaluate it through a user study and a post-hoc pipeline evaluation. Results show that Eye2Eye significantly reduces task completion time and interaction load while increasing trust, demonstrating its components work in concert to improve collaboration.
GaussTwin: Unified Simulation and Correction with Gaussian Splatting for Robotic Digital Twins
Mar 05, 2026Digital twins promise to enhance robotic manipulation by maintaining a consistent link between real-world perception and simulation. However, most existing systems struggle with the lack of a unified model, complex dynamic interactions, and the real-to-sim gap, which limits downstream applications such as model predictive control. Thus, we propose GaussTwin, a real-time digital twin that combines position-based dynamics with discrete Cosserat rod formulations for physically grounded simulation, and Gaussian splatting for efficient rendering and visual correction. By anchoring Gaussians to physical primitives and enforcing coherent SE(3) updates driven by photometric error and segmentation masks, GaussTwin achieves stable prediction-correction while preserving physical fidelity. Through experiments in both simulation and on a Franka Research 3 platform, we show that GaussTwin consistently improves tracking accuracy and robustness compared to shape-matching and rigid-only baselines, while also enabling downstream tasks such as push-based planning. These results highlight GaussTwin as a step toward unified, physically meaningful digital twins that can support closed-loop robotic interaction and learning.
Meanshift Shape Formation Control Using Discrete Mass Distribution
Feb 01, 2026The density-distribution method has recently become a promising paradigm owing to its adaptability to variations in swarm size. However, existing studies face practical challenges in achieving complex shape representation and decentralized implementation. This motivates us to develop a fully decentralized, distribution-based control strategy with the dual capability of forming complex shapes and adapting to swarm-size variations. Specifically, we first propose a discrete mass-distribution function defined over a set of sample points to model swarm formation. In contrast to the continuous density-distribution method, our model eliminates the requirement for defining continuous density functions-a task that is difficult for complex shapes. Second, we design a decentralized meanshift control law to coordinate the swarm's global distribution to fit the sample-point distribution by feeding back mass estimates. The mass estimates for all sample points are achieved by the robots in a decentralized manner via the designed mass estimator. It is shown that the mass estimates of the sample points can asymptotically converge to the true global values. To validate the proposed strategy, we conduct comprehensive simulations and real-world experiments to evaluate the efficiency of complex shape formation and adaptability to swarm-size variations.
Digital Twin Channel-Aided CSI Prediction: A Environment-based Subspace Extraction Approach for Achieving Low Overhead and Robustness
Aug 07, 2025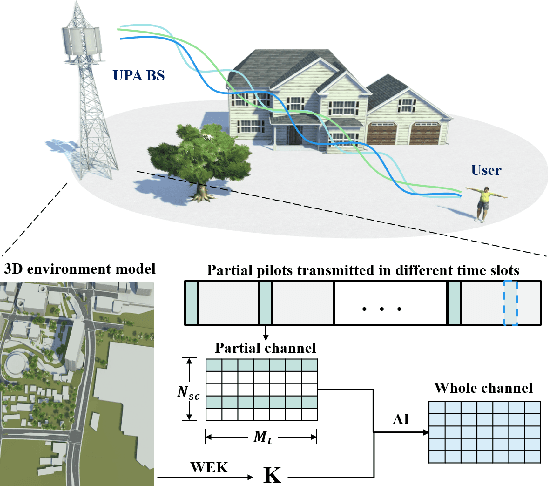
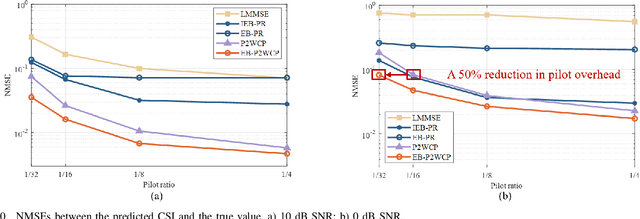
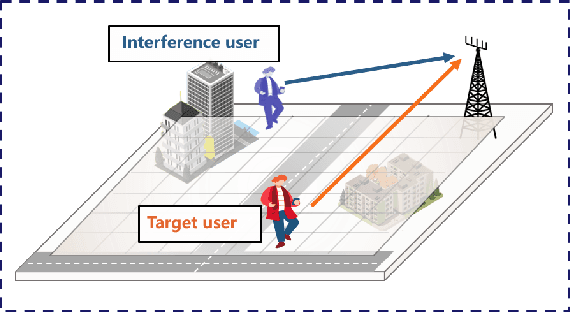
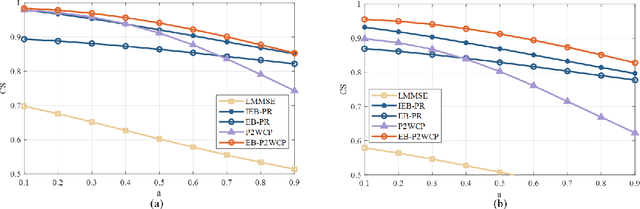
To meet the robust and high-speed communication requirements of the sixth-generation (6G) mobile communication system in complex scenarios, sensing- and artificial intelligence (AI)-based digital twin channel (DTC) techniques become a promising approach to reduce system overhead. In this paper, we propose an environment-specific channel subspace basis (EB)-aided partial-to-whole channel state information (CSI) prediction method (EB-P2WCP) for realizing DTC-enabled low-overhead channel prediction. Specifically, EB is utilized to characterize the static properties of the electromagnetic environment, which is extracted from the digital twin map, serving as environmental information prior to the prediction task. Then, we fuse EB with real-time estimated local CSI to predict the entire spatial-frequency domain channel for both the present and future time instances. Hence, an EB-based partial-to-whole CSI prediction network (EB-P2WNet) is designed to achieve a robust channel prediction scheme in various complex scenarios. Simulation results indicate that incorporating EB provides significant benefits under low signal-to-noise ratio and pilot ratio conditions, achieving a reduction of up to 50% in pilot overhead. Additionally, the proposed method maintains robustness against multi-user interference, tolerating 3-meter localization errors with only a 0.5 dB NMSE increase, and predicts CSI for the next channel coherent time within 1.3 milliseconds.
Making Acoustic Side-Channel Attacks on Noisy Keyboards Viable with LLM-Assisted Spectrograms' "Typo" Correction
Apr 15, 2025The large integration of microphones into devices increases the opportunities for Acoustic Side-Channel Attacks (ASCAs), as these can be used to capture keystrokes' audio signals that might reveal sensitive information. However, the current State-Of-The-Art (SOTA) models for ASCAs, including Convolutional Neural Networks (CNNs) and hybrid models, such as CoAtNet, still exhibit limited robustness under realistic noisy conditions. Solving this problem requires either: (i) an increased model's capacity to infer contextual information from longer sequences, allowing the model to learn that an initially noisily typed word is the same as a futurely collected non-noisy word, or (ii) an approach to fix misidentified information from the contexts, as one does not type random words, but the ones that best fit the conversation context. In this paper, we demonstrate that both strategies are viable and complementary solutions for making ASCAs practical. We observed that no existing solution leverages advanced transformer architectures' power for these tasks and propose that: (i) Visual Transformers (VTs) are the candidate solutions for capturing long-term contextual information and (ii) transformer-powered Large Language Models (LLMs) are the candidate solutions to fix the ``typos'' (mispredictions) the model might make. Thus, we here present the first-of-its-kind approach that integrates VTs and LLMs for ASCAs. We first show that VTs achieve SOTA performance in classifying keystrokes when compared to the previous CNN benchmark. Second, we demonstrate that LLMs can mitigate the impact of real-world noise. Evaluations on the natural sentences revealed that: (i) incorporating LLMs (e.g., GPT-4o) in our ASCA pipeline boosts the performance of error-correction tasks; and (ii) the comparable performance can be attained by a lightweight, fine-tuned smaller LLM (67 times smaller than GPT-4o), using...
Wireless Environmental Information Theory: A New Paradigm towards 6G Online and Proactive Environment Intelligence Communication
Dec 16, 2024
The channel is one of the five critical components of a communication system, and its ergodic capacity is based on all realizations of statistic channel model. This statistical paradigm has successfully guided the design of mobile communication systems from 1G to 5G. However, this approach relies on offline channel measurements in specific environments, and the system passively adapts to new environments, resulting in deviation from the optimal performance. With the pursuit of higher capacity and data rate of 6G, especially facing the ubiquitous environments, there is an urgent need for a new paradigm to combat the randomness of channel, i.e., more proactive and online manner. Motivated by this, we propose an environment intelligence communication (EIC) based on wireless environmental information theory (WEIT) for 6G. The proposed EIC architecture is composed of three steps: Firstly, wireless environmental information (WEI) is acquired using sensing techniques. Then, leveraging WEI and channel data, AI techniques are employed to predict channel fading, thereby mitigating channel uncertainty. Thirdly, the communication system autonomously determines the optimal air-interface transmission strategy based on real-time channel predictions, enabling intelligent interaction with the physical environment. To make this attractive paradigm shift from theory to practice, we answer three key problems to establish WEIT for the first time. How should WEI be defined? Can it be quantified? Does it hold the same properties as statistical communication information? Furthermore, EIC aided by WEI (EIC-WEI) is validated across multiple air-interface tasks, including CSI prediction, beam prediction, and radio resource management. Simulation results demonstrate that the proposed EIC-WEI significantly outperforms the statistical paradigm in decreasing overhead and performance optimization.
Wireless Environment Information Sensing, Feature, Semantic, and Knowledge: Four Steps Towards 6G AI-Enabled Air Interface
Sep 28, 2024



The air interface technology plays a crucial role in optimizing the communication quality for users. To address the challenges brought by the radio channel variations to air interface design, this article proposes a framework of wireless environment information-aided 6G AI-enabled air interface (WEI-6G AI$^{2}$), which actively acquires real-time environment details to facilitate channel fading prediction and communication technology optimization. Specifically, we first outline the role of WEI in supporting the 6G AI$^{2}$ in scenario adaptability, real-time inference, and proactive action. Then, WEI is delineated into four progressive steps: raw sensing data, features obtained by data dimensionality reduction, semantics tailored to tasks, and knowledge that quantifies the environmental impact on the channel. To validate the availability and compare the effect of different types of WEI, a path loss prediction use case is designed. The results demonstrate that leveraging environment knowledge requires only 2.2 ms of model inference time, which can effectively support real-time design for future 6G AI$^{2}$. Additionally, WEI can reduce the pilot overhead by 25\%. Finally, several open issues are pointed out, including multi-modal sensing data synchronization and information extraction method construction.
Can Wireless Environmental Information Decrease Pilot Overhead: A CSI Prediction Example
Aug 13, 2024



Channel state information (CSI) is crucial for massive multi-input multi-output (MIMO) system. As the antenna scale increases, acquiring CSI results in significantly higher system overhead. In this letter, we propose a novel channel prediction method which utilizes wireless environmental information with pilot pattern optimization for CSI prediction (WEI-CSIP). Specifically, scatterers around the mobile station (MS) are abstracted from environmental information using multiview images. Then, an environmental feature map is extracted by a convolutional neural network (CNN). Additionally, the deep probabilistic subsampling (DPS) network acquires an optimal fixed pilot pattern. Finally, a CNN-based channel prediction network is designed to predict the complete CSI, using the environmental feature map and partial CSI. Simulation results show that the WEI-CSIP can reduce pilot overhead from 1/5 to 1/8, while improving prediction accuracy with normalized mean squared error reduced to 0.0113, an improvement of 83.2% compared to traditional channel prediction methods.
Visual Imitation Learning of Task-Oriented Object Grasping and Rearrangement
Mar 20, 2024Task-oriented object grasping and rearrangement are critical skills for robots to accomplish different real-world manipulation tasks. However, they remain challenging due to partial observations of the objects and shape variations in categorical objects. In this paper, we propose the Multi-feature Implicit Model (MIMO), a novel object representation that encodes multiple spatial features between a point and an object in an implicit neural field. Training such a model on multiple features ensures that it embeds the object shapes consistently in different aspects, thus improving its performance in object shape reconstruction from partial observation, shape similarity measure, and modeling spatial relations between objects. Based on MIMO, we propose a framework to learn task-oriented object grasping and rearrangement from single or multiple human demonstration videos. The evaluations in simulation show that our approach outperforms the state-of-the-art methods for multi- and single-view observations. Real-world experiments demonstrate the efficacy of our approach in one- and few-shot imitation learning of manipulation tasks.