 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaMemento: Adaptive Memory-Assisted Policy Optimization for Reinforcement Learning
Oct 06, 2024



In sparse reward scenarios of reinforcement learning (RL), the memory mechanism provides promising shortcuts to policy optimization by reflecting on past experiences like humans. However, current memory-based RL methods simply store and reuse high-value policies, lacking a deeper refining and filtering of diverse past experiences and hence limiting the capability of memory. In this paper, we propose AdaMemento, an adaptive memory-enhanced RL framework. Instead of just memorizing positive past experiences, we design a memory-reflection module that exploits both positive and negative experiences by learning to predict known local optimal policies based on real-time states. To effectively gather informative trajectories for the memory, we further introduce a fine-grained intrinsic motivation paradigm, where nuances in similar states can be precisely distinguished to guide exploration. The exploitation of past experiences and exploration of new policies are then adaptively coordinated by ensemble learning to approach the global optimum. Furthermore, we theoretically prove the superiority of our new intrinsic motivation and ensemble mechanism. From 59 quantitative and visualization experiments, we confirm that AdaMemento can distinguish subtle states for better exploration and effectively exploiting past experiences in memory, achieving significant improvement over previous methods.
The Exploration-Exploitation Dilemma Revisited: An Entropy Perspective
Aug 19, 2024

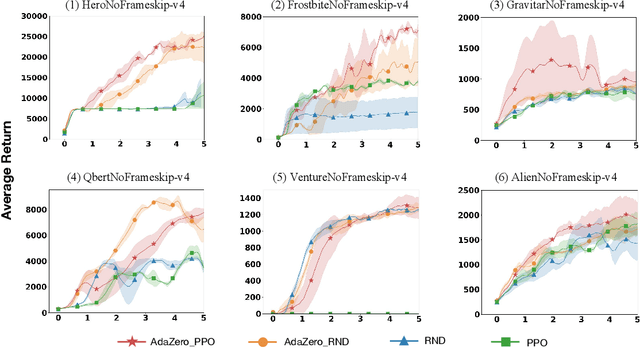
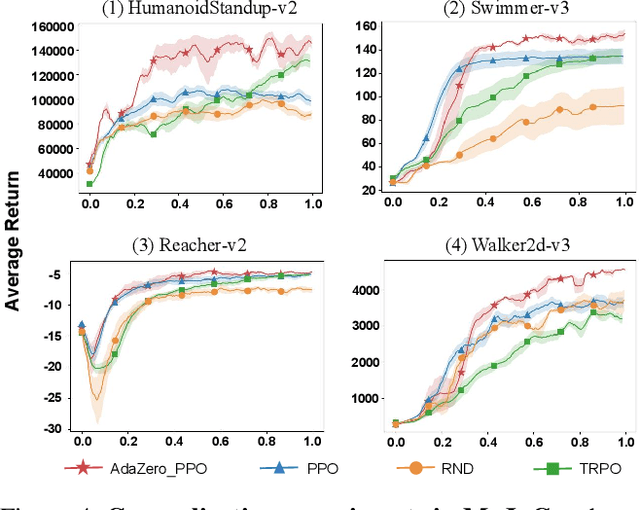
The imbalance of exploration and exploitation has long been a significant challenge in reinforcement learning. In policy optimization, excessive reliance on exploration reduces learning efficiency, while over-dependence on exploitation might trap agents in local optima. This paper revisits the exploration-exploitation dilemma from the perspective of entropy by revealing the relationship between entropy and the dynamic adaptive process of exploration and exploitation. Based on this theoretical insight, we establish an end-to-end adaptive framework called AdaZero, which automatically determines whether to explore or to exploit as well as their balance of strength. Experiments show that AdaZero significantly outperforms baseline models across various Atari and MuJoCo environments with only a single setting. Especially in the challenging environment of Montezuma, AdaZero boosts the final returns by up to fifteen times. Moreover, we conduct a series of visualization analyses to reveal the dynamics of our self-adaptive mechanism, demonstrating how entropy reflects and changes with respect to the agent's performance and adaptive process.
Reflective Policy Optimization
Jun 06, 2024



On-policy reinforcement learning methods, like Trust Region Policy Optimization (TRPO) and Proximal Policy Optimization (PPO), often demand extensive data per update, leading to sample inefficiency. This paper introduces Reflective Policy Optimization (RPO), a novel on-policy extension that amalgamates past and future state-action information for policy optimization. This approach empowers the agent for introspection, allowing modifications to its actions within the current state. Theoretical analysis confirms that policy performance is monotonically improved and contracts the solution space, consequently expediting the convergence procedure. Empirical results demonstrate RPO's feasibility and efficacy in two reinforcement learning benchmarks, culminating in superior sample efficiency. The source code of this work is available at https://github.com/Edgargan/RPO.
Transductive Off-policy Proximal Policy Optimization
Jun 06, 2024



Proximal Policy Optimization (PPO) is a popular model-free reinforcement learning algorithm, esteemed for its simplicity and efficacy. However, due to its inherent on-policy nature, its proficiency in harnessing data from disparate policies is constrained. This paper introduces a novel off-policy extension to the original PPO method, christened Transductive Off-policy PPO (ToPPO). Herein, we provide theoretical justification for incorporating off-policy data in PPO training and prudent guidelines for its safe application. Our contribution includes a novel formulation of the policy improvement lower bound for prospective policies derived from off-policy data, accompanied by a computationally efficient mechanism to optimize this bound, underpinned by assurances of monotonic improvement. Comprehensive experimental results across six representative tasks underscore ToPPO's promising performance.
Smoothing Advantage Learning
Mar 20, 2022



Advantage learning (AL) aims to improve the robustness of value-based reinforcement learning against estimation errors with action-gap-based regularization. Unfortunately, the method tends to be unstable in the case of function approximation. In this paper, we propose a simple variant of AL, named smoothing advantage learning (SAL), to alleviate this problem. The key to our method is to replace the original Bellman Optimal operator in AL with a smooth one so as to obtain more reliable estimation of the temporal difference target. We give a detailed account of the resulting action gap and the performance bound for approximate SAL. Further theoretical analysis reveals that the proposed value smoothing technique not only helps to stabilize the training procedure of AL by controlling the trade-off between convergence rate and the upper bound of the approximation errors, but is beneficial to increase the action gap between the optimal and sub-optimal action value as well.
Robust Action Gap Increasing with Clipped Advantage Learning
Mar 20, 2022



Advantage Learning (AL) seeks to increase the action gap between the optimal action and its competitors, so as to improve the robustness to estimation errors. However, the method becomes problematic when the optimal action induced by the approximated value function does not agree with the true optimal action. In this paper, we present a novel method, named clipped Advantage Learning (clipped AL), to address this issue. The method is inspired by our observation that increasing the action gap blindly for all given samples while not taking their necessities into account could accumulate more errors in the performance loss bound, leading to a slow value convergence, and to avoid that, we should adjust the advantage value adaptively. We show that our simple clipped AL operator not only enjoys fast convergence guarantee but also retains proper action gaps, hence achieving a good balance between the large action gap and the fast convergence. The feasibility and effectiveness of the proposed method are verified empirically on several RL benchmarks with promising performance.
Stabilizing Q Learning Via Soft Mellowmax Operator
Dec 18, 2020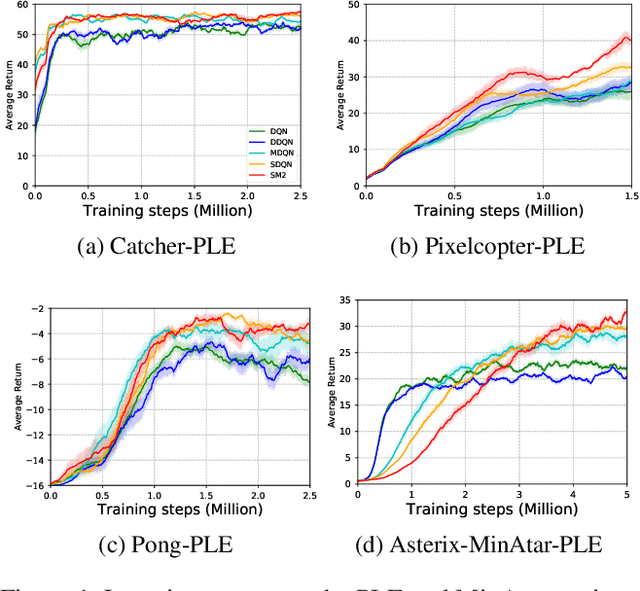

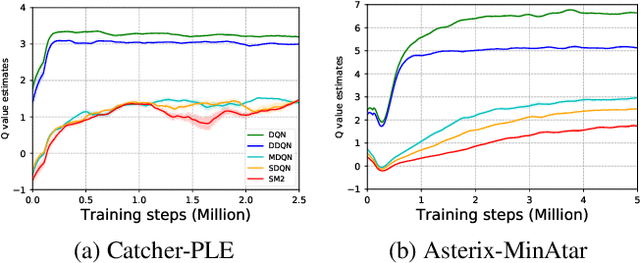

Learning complicated value functions in high dimensional state space by function approximation is a challenging task, partially due to that the max-operator used in temporal difference updates can theoretically cause instability for most linear or non-linear approximation schemes. Mellowmax is a recently proposed differentiable and non-expansion softmax operator that allows a convergent behavior in learning and planning. Unfortunately, the performance bound for the fixed point it converges to remains unclear, and in practice, its parameter is sensitive to various domains and has to be tuned case by case. Finally, the Mellowmax operator may suffer from oversmoothing as it ignores the probability being taken for each action when aggregating them. In this paper, we address all the above issues with an enhanced Mellowmax operator, named SM2 (Soft Mellowmax). Particularly, the proposed operator is reliable, easy to implement, and has provable performance guarantee, while preserving all the advantages of Mellowmax. Furthermore, we show that our SM2 operator can be applied to the challenging multi-agent reinforcement learning scenarios, leading to stable value function approximation and state of the art performance.
Trust Region-Guided Proximal Policy Optimization
Jan 29, 2019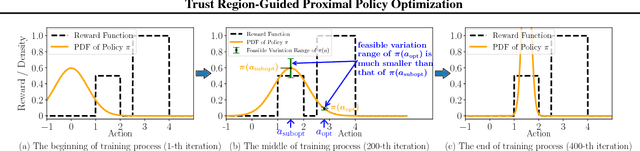
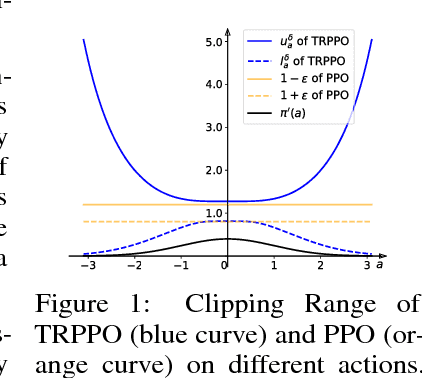
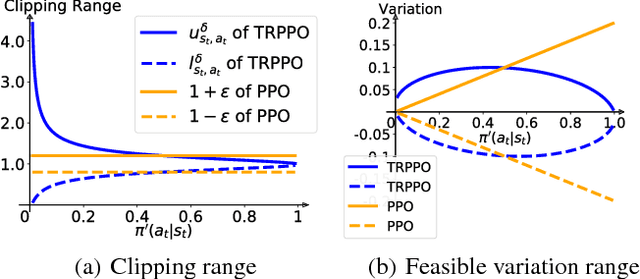
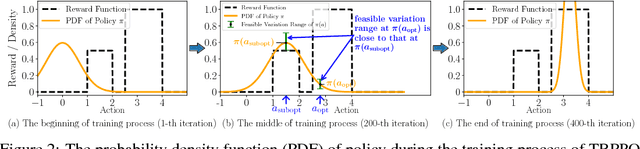
Model-free reinforcement learning relies heavily on a safe yet exploratory policy search. Proximal policy optimization (PPO) is a prominent algorithm to address the safe search problem, by exploiting a heuristic clipping mechanism motivated by a theoretically-justified "trust region" guidance. However, we found that the clipping mechanism of PPO could lead to a lack of exploration issue. Based on this finding, we improve the original PPO with an adaptive clipping mechanism guided by a "trust region" criterion. Our method, termed as Trust Region-Guided PPO (TRPPO), improves PPO with more exploration and better sample efficiency, while maintains the safe search property and design simplicity of PPO. On several benchmark tasks, TRPPO significantly outperforms the original PPO and is competitive with several state-of-the-art methods.